
Fターム[2F062HH33]の内容
機械的手段の使用による測定装置 (14,257) | プローブ、測定子 (1,750) | フィーラの支持、復帰手段 (158) | ばね (81) | 板ばね (10)
Fターム[2F062HH33]に分類される特許
1 - 10 / 10
タッチプローブ
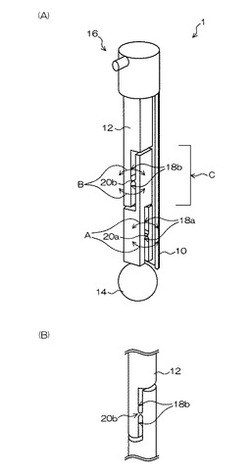
【課題】細穴の奥や突起部を有するような被測定物でも高精度、かつ高速に測定を行うタッチプローブを提供する。
【解決手段】鉛直下方に延びて、材料側面に測定子14を接触させて該材料の位置を検出するタッチプローブ1において、柱状に形成された鉛直方向に延びるプローブ本体12と、前記プローブ本体12の先端に取り付けられた測定子14と、前記測定子14の上部であって、プローブ本体長手方向に形成された二つの切れ込み18a、18bと、該二つの切れ込み18a、18bにより、連結部が形成され、該連結部を支点20a、20bとして可動する可動部分と、前記支点20a、20bを挟むように形成される差動変圧部とを備え、互いに直交する2方向の変位を検出可能とした。
(もっと読む)
触針式測定装置

【課題】触針が測定点の直上に位置している状態において測定対象物の表面の測定点を実質的に真上から検知することを可能とする観察手段を備えた触針式測定装置を提供する。
【解決手段】触針式測定装置100において、長手軸線方向に延在する細長い触針110であって、測定対象物10の表面12の所定の測定点14に運ばれて同測定点14に接触するようにされる尖端部112を有する触針110と、該触針110の周囲の少なくとも一部に配置され、表面12の測定点14及び該測定点14の周囲からの光を受光する受光部130と、を備え、受光部130で受光した光に基づき、測定点14に対する尖端部112の位置決めを行う。
(もっと読む)
形状測定装置
【課題】プローブの撓みの影響を受けずに高精度の形状測定を行う。
【解決手段】プローブ先端部3に一体に平面ダイクロイックミラー10及び球面ミラー16を設ける。オートコリメータ光学系5により平面ダイクロイックミラー10の傾斜量を測定し、並進移動量測定光学系12により球面ミラー16のX,Y軸方向のずれ量を測定する。ずれ量算出部42bは、測定した平面ダイクロイックミラー10の傾斜量及び球面ミラー16のずれ量に基づいて、プローブ先端部3において被測定物4の表面に接触する接触点となる球19の基準位置に対するX,Y軸方向のずれ量を算出する。推定部42cは、ずれ量算出部42bにより算出されたずれ量から、プローブ先端部3の球19のX,Y軸方向の位置を推定する。
(もっと読む)
三次元形状測定装置用プローブ及び三次元形状測定装置
【課題】鉛直面及び水平面いずれについても小さい測定力による測定を可能とする。
【解決手段】三次元形状測定装置用プローブ1は、取付用部材2、揺動部3、連結機構、アーム取付部120、及び板バネ9A,9B、及び取付用部材2を備える。アーム取付部120にはスタイラス121が下端に配置されたアーム122が垂下して取り付けられている。アーム取付部120は板バネ9A,9Bを介して揺動部3に保持されている。揺動部3は連結機構によって水平方向に傾動可能に取付用部材2に連結されている。揺動部3の可動側磁石と取付用部材2の固定側磁石との間の磁気的吸引力によりアーム122が鉛直方向に延びる中立位置に揺動部3を復元させる復元力が作用する。鉛直面測定時の測定力は可動側磁石との間の固定側磁石の磁気的吸引力により得られる。水平面測定時の測定力は板バネ9A,9Bが鉛直方向に撓むことで得られる。
(もっと読む)
ベルト外周長の測定方法
【課題】ベルト外周長を正確に測定することができるベルト外周長の測定方法を提供する。
【解決手段】ワイヤー1を引き出し自在に収容すると共にワイヤー1の引き出し長さを計測するワイヤーエンコーダー2を用いる。そして回転軸3に懸架されたベルト4にワイヤー1の先端を治具5で取り付け、回転軸3を駆動してベルト4を一周走行させると共に、ワイヤーエンコーダー2から引き出されたワイヤー1をベルト4の外周に一周巻き付ける。このときのワイヤー1の引き出し長さをワイヤーエンコーダー2で計測することによって、ベルト4の外周長を測定する。ベルト4に巻き付けたワイヤー1の引き出し長さをワイヤーエンコーダー2で計測することによって、ベルト4の外周長を自動的に測定することができ、スリップなどの問題なく、ベルト外周長を正確に測定することができる。
(もっと読む)
寸法測定ヘッド
【課題】測定結果の安定性を向上する。
【解決手段】接触子20を保持するアーム部2と、アーム部2を変位可能にする機構と、アーム部2の変位量を検知するセンサ部8と、アーム部2を直動変位可能に付勢するための付勢部材6を備えている。付勢部材6は、所定間隔を置いて平行に組み付けられた二枚の付勢板バネ60と、各付勢板バネ60の一部に設けられた補強部材62と、各補強部材62を平行に保つための平行保持部材63とを備えている。
(もっと読む)
寸法測定ヘッド
【課題】測定結果の安定化と、ワーク表面を傷つけないようにする。
【解決手段】接触子20を保持するアーム部2と、アーム部2を変位可能にする機構と、アーム部2の変位量を検知するセンサ部8と、アーム部2を初期位置に付勢する第一付勢部材6と、第一付勢部材6の付勢力を調整する第二付勢部材3とを備え、第二付勢部材3は、コイルバネ30と、コイルバネ30の一端部を所定方向に支持する固定部31と、コイルバネ30の他端部をアーム部2に連結するジョイント部32とを備え、アーム部2の変位に追従して、コイルバネ30が屈曲変形するよう構成されており、アーム部2の変位に拘らず、ワークに対する接触子20の押付力を所定範囲内に保つ。
(もっと読む)
寸法測定ヘッド
【課題】測定結果の安定化と、ワーク表面を傷つけないようにする。
【解決手段】接触子20を保持するアーム部2と、アーム部2を変位可能する機構5と、アーム部2の変位量を検知するセンサ部8とを備え、アーム部2を変位し接触子20をワークWに当接してワークWの寸法を測定する寸法測定ヘッドにおいて、アーム部2は、初期位置に付勢する第一付勢部材6と、第一付勢部材6の付勢力を調整する第二付勢部材3とを備え、アーム部2の変位に拘らず、ワークWに対する接触子20の押付力を所定範囲内に保つように構成している。
(もっと読む)
プローブ制御装置および形状測定装置
【課題】接触式のプローブの接触荷重の変動を低減し、高速かつ高精度な3次元計測を可能にする。
【解決手段】図示しないワークに接触させるプローブ1は、板バネ2a、2bを介してステージ7に支持され、リニアモータ(10、11)によって上下動する。まず、位置設定器17の指令値に従ってステージ7を移動させ、プローブ1をワークに接触させた後は、板バネ2a、2bの変位によってプローブ1の接触荷重を検出する変位センサ5と荷重設定器18を含むプローブ荷重制御系に切換えて接触荷重を制御しながらプローブ1を走査する。走査開始直後には接触荷重に誤差が発生するため、予め設計値を用いた演算あるいはダミー走査によって求めた荷重補正信号を荷重補正器22に蓄えておき、必要に応じてプローブ荷重制御系の出力に加える。
(もっと読む)
振動減衰システムを備えた座標測定装置
測定されるべき物体(15)に接触するためのセンス部材(18)を備えたスタイラス(14)と、前記スタイラス(14)が弾性手段(19)を通じて接続された支持ユニット(13)と、導電材料中に渦電流を発生させることによって前記スタイラス(14)の振動を減衰させるための磁石手段(46)とを有するプローブを持つ座標測定装置。前記弾性手段(19)は、導電材料でできた少なくとも1つの板ばね(41)を有し、前記磁石手段(46)は、前記板ばね(41)中に渦電流を発生させる。  (もっと読む)
(もっと読む)
1 - 10 / 10
[ Back to top ]