
Fターム[2F063CB13]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 補償、補正、調整、調節 (232) | 位置ずれの補正 (30) | バックラッシュによるもの (10)
Fターム[2F063CB13]に分類される特許
1 - 10 / 10
回転角度検出装置
操舵角センサ
【課題】環状駆動ギヤの真円度によって、第1の従動ギヤ及び第2の従動ギヤに生じる回転角度の誤差の影響が小さくされて、ステアリングホイールの回転角度情報を精度良く生成することができる操舵角センサを提供する。
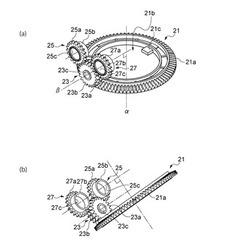
【解決手段】ステアリングホイールの回転に伴って回転する環状駆動ギヤ21と、それぞれマグネットが設けられて前記環状駆動ギヤ21の回転に応じて従動回転する第1の従動ギヤ25及び第2の従動ギヤ27と、を備え、前記第1の従動ギヤ25及び前記第2の従動ギヤ27の回転に基づく磁界の変化により前記ステアリングホイールの回転角度情報を生成するための操舵角センサにおいて、前記環状駆動ギヤ21と、前記第1の従動ギヤ25及び前記第2の従動ギヤ27と、の間に、それぞれのギヤ25、27と噛み合う中間ギヤ23を介在させる。
(もっと読む)
回転角度検出装置および電動パワーステアリング装置

【課題】簡単な構成でメインギヤと検出ギヤ間のバックラッシによる検出誤差を補正し、精度の高い回転角度を検出できる回転角度検出装置および電動パワーステアリング装置を提供する。
【解決手段】回転検出手段から出力される検出信号に基づいてステアリングシャフトの回転角度を演算するともに、ステアリングシャフトの回転角速度が所定値以上である場合に、操舵トルク検出手段により検出される操舵トルクに基づいて演算されるトーションバーの捩れ角と、ステアリングシャフトの回転角度との差分から、メインギヤと検出ギヤ間のバックラッシによる誤差を補正するためのバックラッシ補正値を演算する回転角度演算手段と、バックラッシ補正値に基づいてステアリングシャフトの回転角度を補正する回転角度補正手段とを備える。
(もっと読む)
回転角度検出装置の初期設定方法
【課題】初期設定作業の簡素化を図りつつ、しかも当該作業精度に依存することなく検出誤差を低減することができる回転角度検出装置の初期設定方法を提供する。
【解決手段】初期設定時には、まず主動歯車が正方向へ任意の角度だけ回転される。このときサンプリングされる第1及び第2の従動歯車の回転角度αn,βnと、これらに基づき算出される主動歯車の仮回転角度θLから逆算される第1及び第2の従動歯車の回転角度αL,βLとの関係に基づき、2つの回帰直線Y1,Y2が求められる。同様にして、主動歯車が逆方向へ任意の角度だけ回転されたときの2つの回帰直線Y3,Y4が求められる。つぎに、各回帰直線Y1〜Y4と、サンプリングされる第1及び第2の従動歯車の各回転角度αn,βnとの差分の平均値が、実際にサンプリングされる第1及び第2の従動歯車の回転角度に加算される補正データとして初期設定される。
(もっと読む)
絶対位置測定装置
【課題】スパイラルキー溝方式の絶対位置測定装置において、キーおよびキー溝間のがたつきを低減することができ、測定精度を向上させることができる絶対位置測定装置を提供すること。
【解決手段】スピンドル3には、外周にリード角の異なる第1のキー溝32と第2のキー溝33とが形成され、位相信号発信手段4は、スピンドル3が挿通された板状のステータ40と、スピンドル3を中心に回転可能に支持されて第1のキー溝32に係合する第1のキー51を有する筒状の第1のロータ50と、第1のロータ50の外側でスピンドル3を中心に回転可能に支持されて第2のキー溝33に係合する第2のキー61を有する筒状の第2のロータ60と、第1のロータ50および第2のロータ60を相反する回転方向に与圧する与圧手段としてのコイルばね70とを有する。
(もっと読む)
回転検出装置の信号処理回路
【課題】検出対象の実質的な回転方向を含む回転情報をより正確に生成出力することのできる回転検出装置の信号処理装置を提供する。
【解決手段】出力部8は、クランクロータ1の回転方向に逆転が無かった旨が2回数連続して判定される場合、これら一連の判定のうちの最初の判定時直前の第1判定タイミングにおけるクランクロータ1の回転方向に係る判定結果を用いて第3パルス信号Scを生成出力する。また、出力部8は、クランクロータ1の回転方向に逆転が有った旨が判定される場合、この逆転が有った旨が判定されてからクランクロータ1の回転方向に逆転が無かった旨が2回連続して判定されるまでにおいては、これら一連の判定のうちの最初の逆転が有った旨の判定時直前における第3パルス信号Scの信号レベルを継続して出力する
(もっと読む)
回転角度検出装置
【課題】検出対象である回転体の回転角度の検出精度を向上させることができる。
【解決手段】舵角センサ11は、ステアリングシャフト12と一体回転する外歯車14及びこれに噛み合う内歯車15を備えた。外歯車14及び内歯車15の第1及び第2の検出面14a,15aには、6つの第1及び第2検出部材21,31を環状に配設するとともに、これらの内側には環状の第1及び第2補助検出部材22,32を設けた。第1及び第2検出部材21,31の幅、並びに第1及び第2補助検出部材22,32の幅を検出してこれら幅情報を含む明暗情報を出力するラインセンサ42を、第1及び第2の検出面14a,15aに対向して配設した。ラインセンサ42からの明暗情報に基づき外歯車14及び内歯車15の単位角度範囲内における回転角度を求め、これら回転角度の組み合わせに基づき外歯車14の絶対回転角度を算出するマイクロコンピュータ43を備えた。
(もっと読む)
アクチュエータ及びアクチュエータのセンサ特性補正方法
【課題】アクチュエータにセンサを取り付ける場合に、組み付け誤差や個々のアクチュエータのメカニカル特性の差をより理想的なセンサ特性として補正可能でアクチュエータの出力精度を向上可能なアクチュエータ及びアクチュエータのセンサ特性補正方法を提供する。
【解決手段】このアクチュエータ100は、センサ113が搭載されており、センサはアクチュエータへの取り付け後にセンサ特性の書き換えが可能である。
(もっと読む)
回転角度検出装置及びその初期設定方法
【課題】演算負荷を抑えつつ、主動歯車と従動歯車との間のバックラッシに起因する検出誤差を低減することができる回転角度検出装置及びその初期設定方法を提供する。
【解決手段】正方向誤差(回転角度α1,β1)を求める段階(S1−2〜S1−5)、逆方向誤差(回転角度α2,β2)を求める段階(S1−6〜S1−9)、正方向誤差と逆方向誤差との平均値(回転角度αave,βave)を求める段階(S1−11)、主動歯車14の回転角度が0°となる誤差を含まない理論的な第1及び第2の従動歯車15,16の回転角度α0,β0と前記平均値との差(オフセット値αofs,βofs)を求める段階、被検出物の回転角度θを求める際に、実際に検出された第1及び第2の従動歯車15,16の回転角度α,βに加算される補正データとしてオフセット値αofs,βofsを記憶する段階を経て、回転角度検出装置11の初期設定を行うようにした。
(もっと読む)
舵角センサ
【課題】 高精度の舵角センサを提供する。
【解決手段】 ステアリングシャフト(105)反転時のバックラッシによる主動ギア(7g)に対する当該従動ギアの回転遅れを補正するための補正値を記憶可能な記憶手段(43)を設けてあり、演算手段(39)が、測定機構(15)の測定結果を当該記憶手段に記憶させた補正値に基づいて補正することによって、ステアリングシャフトの回転角度を演算可能に構成してある。補正値に基づいて測定機構による従動ギアの測定結果が補正されるので、主動ギアと従動ギアとの間に存するバックラッシを完全又は略一致させることができる。すなわち、舵角センサの高精度化が実現する。
(もっと読む)
1 - 10 / 10
[ Back to top ]