
Fターム[2F063JA06]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | その他の検出器 (142) | 速度計 (5)
Fターム[2F063JA06]に分類される特許
1 - 5 / 5
絶対舵角検出装置
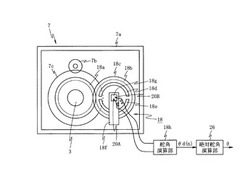
【課題】ステアリングホイールの1回転で1周期の絶対舵角を検出して分解能及びリニアリティを保ちながら速やかに絶対舵角を検出する。
【解決手段】車両の操舵装置の絶対舵角を検出する絶対舵角検出装置であって、前記操舵装置の回転に連動して回転するセンサホイール18cと、GMR素子で構成されるブリッジ回路を有する磁気検出器18gと、該磁気検出器18gの回りに配設された着磁部18d,18eと、前記磁気検出器18gから出力される検出信号に基づいて絶対舵角を演算する舵角演算部26とを備え、前記センサホイール18cに前記磁気検出器18g及び着磁部18d,18eの何れか一方を装着すると共に、他方を固定部に装着し、前記磁気検出器18gは前記操舵装置の1回転を1周期とする検出信号を出力するように構成されている。
(もっと読む)
シリンダの位置計測装置

【課題】
リセットセンサで検出される信号のピークを正確に求めるようにして、ストローク位置センサの原点位置へのリセットを高精度に行えるようにする。また、シリンダチューブ内部のピストン等の直動部材の移動速度如何にかかわらず、正確に原点位置(特定位置)を計測できるようにする。
【解決手段】
回転センサ100の検出回転量から得られるピストン201の計測ストローク位置Inと、磁力センサ301の検出信号(磁力;電圧値)Vnとの対応関係500を求め、この対応関係500に基づいて、ピストン201が原点位置I0に達したときの計測ストローク位置Ip(ピーク位置)を求め、この計測ストローク位置(ピーク位置)Ipを、原点位置I0にリセットする。
(もっと読む)
位置検出装置およびカメラ
【課題】 位置検出を精度良く行うことができる位置検出装置の提供。
【解決手段】 磁気抵抗素子が2対設けられた検出ヘッド2に対して、磁気スケール1が接触しながらは図示左右方向に移動すると、一方の磁気抵抗素子対からはA相出力が、他方の磁気抵抗素子対からはB相出力が出力される。各比較器5a,5bは、A相およびB相出力と基準電圧発生器7からの基準電圧値Vrとに基づいて矩形波Y1,Y2を出力する。矩形波処理回路8は各矩形波Y1,Y2に応じたパルス信号をマイクロコンピュータ9に出力し、マイクロコンピュータ9はそれらのパルス信号をカウントすることにより磁気シート1の移動距離を検出する。基準電圧発生器7は位相検出器6から出力される移動方向情報に基づいて、右方向移動時の基準電圧値または左方向移動時の基準電圧値を各比較器5a,5bに出力する。
(もっと読む)
生体のリハビリ用姿勢モニタリング方法及び装置
【課題】本発明は、3軸加速度計及び3軸角速度計から得られた6軸データの静止状態の零点誤差を補正することにより、動作を正確に測定することを目的とする。
【解決手段】本発明による生体のリハビリ用姿勢モニタリング方法及び装置は、姿勢モニタ部(61)に設けた3軸加速度計(65)及び3軸角速度計(66)から得た6軸データ(62)を慣性演算部(63)に入力し、6軸データ(62)の静止状態(M,N)の零点誤差を補正して高精度に生体(50)の動作を測定する方法と構成である。
(もっと読む)
増分測定および車輪の差速の測定によるステアリングホイールの絶対角位置の決定
自動車のシャーシに対してその自動車のステアリングホイール(1)の絶対角位置θを決定するためのシステムは、ステアリングホイールの相対角位置δをインクリメンタルに測定するための装置と、同一軸に取り付けられた車輪の差速ΔV/Vを測定するための装置(2)と、期間tにおいて角位置と差速をサンプリングするための処理装置(8)を備える。前記装置は、tn瞬間毎に、差速ΔV/Vに従う絶対角位置θ(tn)の推定値θ*(tn)と、角位置θ*(tn)とδ(ti)の間の平均差変位(tn)を決定するのに適した演算手段を備える。ここでiは0からnまでの範囲の変数であり、絶対角位置θ(tn)は平均差変位(tn)と角位置δ(tn)の和である。 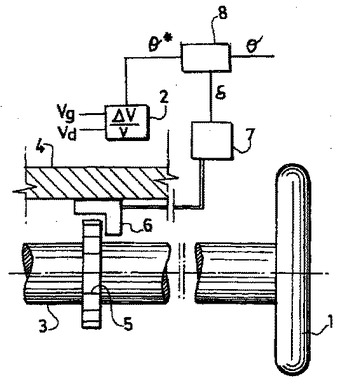 (もっと読む)
(もっと読む)
1 - 5 / 5
[ Back to top ]