
Fターム[2F065AA02]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 1次元 (834)
Fターム[2F065AA02]に分類される特許
821 - 834 / 834
鍛造プロセスを最適化するための方法及び装置

【解決手段】鍛造プレスの長手軸に沿って移動されるところの加工部材の鍛造を最適化するための方法及び装置。該方法は、長手軸に沿って加工部材の第一及び第二の端の相対的な位置を検出し、そしてその間の加工部材の長さを計算することを含む。 (もっと読む)
光学干渉計システムおよび光学干渉計システムを用いる方法
総じて、一態様では、本発明は、干渉部品と測定物体との間の距離を、3本の異なる測定軸の各々に沿って、測定物体を光学干渉部品に対して移動させながら、干渉法を利用して監視するステップと、測定物体の監視距離からの異なる位置に対する第1パラメータおよび第2パラメータの値を決定するステップであって、所与の位置に対して、第1パラメータは、所与の位置において3本の異なる測定軸の各々に沿った測定物体の監視距離に基づき、所与の位置に対して、第2パラメータは、所与の位置において測定軸の内2本の各々に沿った測定物体の監視距離に基づく、ステップと、第1および第2パラメータ値から測定物体の表面形状プロファイルに関する情報を導出するステップとを含む方法を特徴とする。  (もっと読む)
(もっと読む)
分配システムにおける測定装置および方法
本発明は、担体に置かれた対象物の存在、位置および/または形状の測定を可能にする測定装置システムならびにかかる測定のため方法の分野に関する。測定装置には、入射光で前記対象物および前記担体を照射するように配置された少なくとも1つの光源と、前記少なくとも1つの光源から所定の距離に置かれた少なくとも1つのセンサであって、前記担体が前記移動方向に移動されるときに前記対象物および前記担体からの反射光を検出することによって、前記対象物および前記担体を繰り返し測定するように、かつ検出光を電気信号に変換するように構成された少なくとも1つのセンサと、電気信号を用いて、前記対象物および前記担体の測定のそれぞれの三次元サブ画像を得るように、かつ1つまたは複数の前記取得サブ画像から、前記対象物および前記担体の三次元画像を得るように構成された画像処理ユニットと、前記三次元画像から、前記担体における前記対象物の存在、位置および/または形状を決定するように構成された計算ユニットと、が含まれる。  (もっと読む)
(もっと読む)
点呼機構に基づくエレベータ位置決め用視覚装置
位置決め装置は、電磁信号を受信し、かつ光信号を送信するために既知の場所にそれぞれ配置された複数のトランスポンダモジュールと、電磁信号を送信し、かつ光信号を受信する少なくとも1つのトランシーバモジュールと、少なくとも1つのトランシーバモジュールの位置を決定するために、受信した光信号を処理する装置と、を備える。  (もっと読む)
(もっと読む)
本体縁の位置の変化を測定する装置
本願は、部材(1,3)の本体縁(5a)の位置の変化を測定する測定装置(7)に関し、測定装置は、変化に反応するセンサ(9)、光源(8)、本体縁(5a)に固定した測定縁(5)、及び光源(8)から出る光(6)を含んでいる。位置の変化から、(例えば軸受における)力Fによる変形についての情報を取得し、重量又は不平衡を求め、密封部又はプレスばめ部を監視することができる。測定は、なるべく導光体を使用して、反射又は透過で行われる。 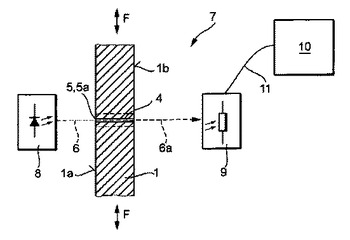 (もっと読む)
(もっと読む)
欠陥位置特定方法及びマーキングシステム

【課題】三次元対象物で検知される欠陥を高い精度で位置特定し、場合によっては、マーキングするための方法を提供すること
【解決手段】本発明は、三次元対象物(2)、特に塗装された車体上の欠陥の位置を特定する方法及びマーキングシステムに関し、撮像装置(3、4)によって、欠陥が検知され、その位置が特定される。本発明によれば、対象物(2)の設計データ(CADデータ)と撮像装置(3、4)の光学撮像特性と対象物(2)が、撮像時に既知であり、これらによって、欠陥の位置が決定され、場合によっては、スプレーヘッドによってマーキングされる。
(もっと読む)
陰影測定による制御の方法と装置
本発明は、2つのジョイント(13、14)の周りを往復するアーム(8)に取り付けられる発光器(5)及び受光器(6)を備えた、レーザオンブロスコーピー(laser ombroscopy)を用いる制御デバイスに関する。前記ジョイントの回転軸(y、z)が、互いに、及び発光器と受光器との間の主光路(x)に対して垂直であることにより、制御された輪郭の画像を高い精度で復元することができる。本発明の装置は特に、溶接法、中でも窪んだ丸溝に適用することができる。
 (もっと読む)
(もっと読む)
連続変化するオフセットマークと、オーバレイ決定方法
【課題】
【解決手段】本発明は、オーバレイマークと、オーバレイ誤差を決定する方法とに関する。本発明の一態様は、連続的に変化するオフセットマークに関する。連続的に変化するオフセットマークは、位置の関数として変化するオフセットを有する周期構造を重ね合わせた1つのマークである。例えば、周期構造は、ピッチなどの格子特性に関する値が異なる格子に対応してよい。本発明の別の態様は、連続的に変化するオフセットマークからオーバレイ誤差を決定する方法に関する。その方法は、一般に、連続的に変化するオフセットマークの対称中心を決定する工程と、それをマークの幾何学的中心と比較する工程と、を備える。オーバレイがゼロである場合には、対称中心は、マークの幾何学的中心と一致する傾向がある。オーバレイがゼロでない場合(例えば、2つの層間にずれがある場合)には、対称中心は、マークの幾何学的中心からずれる。その位置ずれを、連続的に変化するマークの予め設定されたゲインと組み合わせて用いることで、オーバレイ誤差を算出する。
(もっと読む)
測定装置
この発明は、測定対象(12;15;18)の特性を光学的に測定するための測定装置(6)に関し、この測定装置は、ある有効光学空洞長さを有する空洞(7)を形成する、第1および第2反射端(1、2)を有する主共振器(11)、この第1および第2反射端(1、2)の間の光ビーム経路に沿って進む光を発生するための光学ゲイン素子(3)、並びにこの光学ゲイン素子(3)とこの第2反射端(2)の間のこの光ビーム経路に沿って配置してある分散集束共振器素子(5)を含み、それでこの測定対象が少なくとも部分的にこの主共振器(11)のこの光ビーム経路内にあるように配置してあり、およびそれでこの測定装置(6)が更にこの主共振器から出た光の特性を検出するための検出手段(8)を含み、この検出した特性の値がこの測定対象の特性の尺度である。 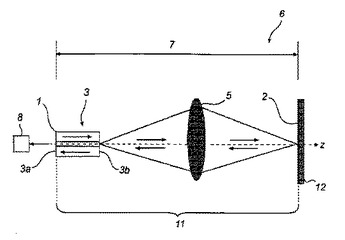 (もっと読む)
(もっと読む)
ステージ装置及び露光装置
光学部材を備えた可動ステージの構造を複雑にすることなく、その光学部材の温度を制御できるステージ装置である。レチクル(R)を保持するレチクルステージ本体(22)をY軸リニアモータ(76A,78A,76B,78B)を用いてレチクルベース(16)上でY方向に駆動する。レチクルステージ本体(22)の端部の光学部材支持部(24B2)上の光学系(32)を介して、レチクルベース(16)上に固定された固定鏡(MX)に計測用レーザビームを照射して、レチクルステージ本体(22)のX方向の位置を計測する。光学系(32)の温度を安定化するために、光学部材支持部(24B2)の底面に空気層(35)を介してロッド部材(27)を固定し、ロッド部材(27)内に温度制御された冷媒を供給する。  (もっと読む)
(もっと読む)
光ビームで機械部品の位置をチェックする方法およびシステム
チェッキング方向(X)に沿って機械部品(2)、たとえば旋盤の工具の位置をチェックする方法およびシステムは、レーザビーム(7)、およびビームの中断を検出するセンサ(8)を有するオプトエレクトロニクス・デバイス(1)を使用する。チェッキング領域(13)におけるチェックされる部品とオプトエレクトロニクス・デバイスとの間の相互変位は、チェッキング方向に垂直な方向(Z)に沿った線形検査運動(30)および検査位置(Pi;P1〜P4)を含むシーケンスに従って制御される。検査位置は、サーチされる位置(PN)へ収束するシーケンスに従って、累進的に縮小する相互間の距離(D)だけチェッキング方向に沿って離される。  (もっと読む)
(もっと読む)
放射の散乱/反射要素の位置測定のシステム及び方法
放射散乱/反射要素の位置を判定するための方法及びシステムであって、放射透過性要素面で放射入射する面に放射エミッタが設けられる。この入射放射は散乱/反射要素により散乱/拡散/反射され、透過性要素により、この要素位置を判定できる検出器に向けてガイドされる。  (もっと読む)
(もっと読む)
機械部品の位置を検査するための装置および方法
【課題】機械部品の存在を検出するための装置、より具体的には、長尺工具の完全性を検査するための装置を提供する。
【解決手段】工具の完全性を検査するための装置は、レーザ光線(21)を用いる光電子検査機構(7)と、工具と光電子検査機構との間の相対的な移動を可能とする長手方向(X)に沿って移動可能な載置台(6)と、例えば送受波器(9、10)を含む前記相対的な位置を検査するための装置と、を備えている。光電子検査機構のセンサ(22)は、光線の遮光を検出する。この遮光時の送受波器の信号に基づき、これを既知の値と比較することによって、工具の完全性が検査される。載置台に連結された光電子検査機構の連結機構(24)は、横方向基準面に沿って光電子検査機構を振動させることができ、この振動により感知可能な画定領域(33)が画成される。振動はモータ(26)により制御され、光線の遮光はセンサにより検出されて、該センサにより工具の端部が感知可能な画定領域に干渉する瞬間が示される。  (もっと読む)
(もっと読む)
白ねぎのぼけ部検出方法およびその装置
【課題】 本発明は、白ねぎのぼけ部の端部の検出を定量的に行うことができる白ねぎのぼけ部検出装置を提供することを目的とする。
【解決手段】 白ねぎ3を拡散照明する蛍光管7および拡散板8と、赤外線を吸収し青色の光のみ透過する光学フィルタ4と、拡散照明された白ねぎ3の反射光を光学フィルタ4を介して入力し、白ねぎのぼけ部3Bおよびその近傍を撮影するCCDカメラ5と、CCDカメラ5の画像信号により、白ねぎの軟白部3Aよりぼけ部3Bに移るぼけ部端部を検出する検出装置11を備える。この構成によれば、ぼけ部3Bの輝度データから、常に同一のしきい値によりぼけ部3Bの端部が検出されることにより、選別過程で等級選別に大きく係る軟白部3Aの長さLが自動で定量的に検出され、人間の主観に依存することなく、均一な白ねぎ3の等級の判定が可能となり、白ねぎ3の品質を安定して均一に維持できる。
(もっと読む)
821 - 834 / 834
[ Back to top ]