
Fターム[2F065AA07]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 光軸と直交方向 (556)
Fターム[2F065AA07]に分類される特許
541 - 556 / 556
画像処理装置、画像処理方法、露光装置、およびデバイス製造方法
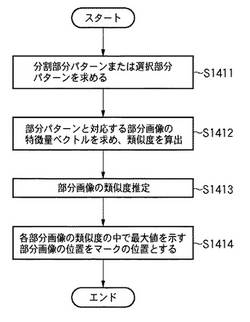
【課題】 対象物画像中の対象物領域の誤認識が抑制された画像処理技術を提供すること。
【解決手段】 対象物画像中の対象物の位置を求める画像処理装置は、対象物画像中の各部分画像および基準画像に関し、対応する部分領域毎に類似度を計算する第1の計算手段と、各部分画像に関し、第1の計算手段により計算された複数の類似度の統計値を計算する第2の計算手段と、第2の計算手段により計算された複数の統計値のうちの最大値に対応した対象物画像中の部分画像の位置を対象物の位置として認識する認識手段とを有する。
(もっと読む)
露光方法及び露光装置、並びにデバイス製造方法

【課題】 マーク計測用の観察系の一部の移動に関わる時間の短縮化を図り、スループットの向上を図ることが可能な露光方法及び露光装置を提供する。
【解決手段】 観察系22A,22Bは、計測用の計測位置Paと、計測位置から離れた退避位置Pbとの間を移動自在な移動部材30A,30Bを含み、移動部材30A,30Bを計測位置Paと退避位置Pbとの間で移動させる。照明光ILの照射により基板上に転写されるべきマスクR上での被照射領域に関する情報に基づいて、移動部材30A,30Bの退避移動時における移動距離を算出する。
(もっと読む)
機械制御可能な乗り物用の測定および安定化システム
本発明に従えば、乗り物、特に飛行物体(1)の移動を測定するために、当該乗り物に搭載されている画像化光学システム(2)を用いて、周辺環境(4)の画像を検知する。前記システムは、構造に基づいて画像のあらゆるシフトを検知して、当該シフトの測定信号を発生させるべく用いられる光電子シフトセンサー(3)を含み、そのために前記センサーが固有の評価ユニットを含む。当該センサーは、無制限個数の物体を表現できるように配置される。測定信号は、飛行物体の運動および/または位置を表わす量として用いられる。当該シフトセンサーは、光学式マウスに用いられているセンサーに類似している。本発明のシステムはまた、例えば飛行高度を制御すべく、距離の測定にも用いることができる。本発明は更に、制御ループにより飛行物体を自動制御する方法にも関係する。  (もっと読む)
(もっと読む)
光学式位置決め装置におけるスペックルサイジング及びセンサ寸法
一実施形態は、一連のフレームにおける光学的特徴の変位を判定することにより一表面に対するデータ入力装置の横方向変位を検知するための光学式変位センサに関するものである。該センサは、少なくともコヒーレント光源(306)、前記表面(304)の一部を照明するための照明用光学系(308)、イメージング用光学系(310)、及び周期的な距離を有する感光素子の第1のアレイ(302)を含む。照明手段及び検出器は、照明された前記表面の部分から反射された光の強度パターンを前記感光素子の第1のアレイ(302)上に生じさせるよう構成される。該強度パターンは、前記アレイ(302)の前記周期的な距離の0.5〜2倍の間の平均スペックル直径を有する複数のスペックルを含む。 (もっと読む)
本体縁の位置の変化を測定する装置
本願は、部材(1,3)の本体縁(5a)の位置の変化を測定する測定装置(7)に関し、測定装置は、変化に反応するセンサ(9)、光源(8)、本体縁(5a)に固定した測定縁(5)、及び光源(8)から出る光(6)を含んでいる。位置の変化から、(例えば軸受における)力Fによる変形についての情報を取得し、重量又は不平衡を求め、密封部又はプレスばめ部を監視することができる。測定は、なるべく導光体を使用して、反射又は透過で行われる。 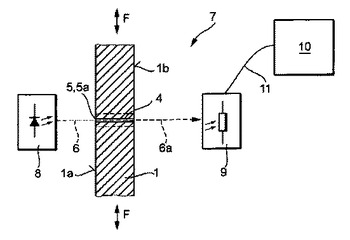 (もっと読む)
(もっと読む)
オブジェクト検出方法、オブジェクト検出装置、およびオブジェクト検出プログラム
本発明の利点は、オブジェクトを適切に検出することである。本発明におけるオブジェクト検出装置は、オブジェクトまでの距離を決定する複数のカメラと、距離を決定する距離決定部と、ピクセルの距離に対するピクセル度数を特定するヒストグラム生成部と、最もありそうな距離を決定するオブジェクト距離決定部と、距離の差に基づくピクセルの確率を提供する確率マッピング部と、ピクセルのグループとしてカーネル領域を決定するカーネル検出部と、カーネル領域の近傍にあるピクセルから選択したピクセルのグループとして縁領域を決定する縁検出部と、オブジェクトが所定の確率で現れるオブジェクト領域を特定するオブジェクト特定部と、を有する。  (もっと読む)
(もっと読む)
リソグラフィ装置、較正方法、較正プレート、デバイス製造方法及びそれにより製造されたデバイス
本発明の一実施例による方法は、少なくとも1つのアライメント・マーカ40と、少なくとも1つのハイト・プロファイル46とを有する較正プレート38を使用して実行することができる。最初に、アライメント・センサを使用して較正プレートが配置される。次に、ハイト・センサを使用してハイト・プロファイルが測定される。次に、較正プレートを実質的に180度回転し、上記2つの操作が繰り返される。この処理手順によって2つの測定されたハイト・プロファイルが得られ、最適フィットを見出すべく、得られた2つの測定されたハイト・プロファイルが比較される。最適フィットを見出すために実行されるシフトの量を使用して、アライメント・マーカとハイト・センサの測定ポイントのX−Y位置の間の距離が決定される。  (もっと読む)
(もっと読む)
表示面上の位置を求める方法及び対話型ディスプレイシステム
【課題】対話型ディスプレイシステムは、画素ベースの表示面と、ライトペンとを含む。
【解決手段】表示面にパターンシーケンスが投影される。このパターンシーケンスは表示面の各位置に対して一意の光強度シーケンスを有する。パターンシーケンスを投影している間に、ライトペンによって任意の位置における光強度が検知される。この光強度は復号化されて、その任意の位置の座標が求められる。  (もっと読む)
(もっと読む)
デジタルカメラによる寸法測定方法
対象上の第1の検出可能点と第2の検出可能点との間の距離は、前記第1の検出可能点を有する第1の画像を作り、次に、カメラを移動させ、続いて、前記第2の検出可能点を有する他の画像を作ることによって、デジタルカメラを用いて測定される。画像上での検出可能点の座標が計算される。2又はそれ以上の重なり合う画像は、重なり合う画像の重複部分での対応する検出可能点が、カメラの移動を決定するために検出されると、カメラによって作られる。  (もっと読む)
(もっと読む)
表面の干渉分析のための方法およびシステムならびに関連する応用例
物体の空間的特性を決定するための方法には、2つ以上の界面を含む測定物体からの走査低コヒーレンス干渉信号を得ることが含まれる。走査低コヒーレンス干渉信号には、2つ以上の重なり合う低コヒーレンス干渉信号(それぞれ個々の界面に起因する)が含まれる。低コヒーレンス干渉信号に基づいて、少なくとも1つの界面の空間的特性が決定される。場合によって、決定は、低コヒーレンス干渉信号のサブセットに基づき、信号の全体に基づくのではない。あるいはまたは加えて、決定は、低コヒーレンス干渉信号を得るために用いられる干渉計の機器応答を示す場合があるテンプレートに基づくことができる。 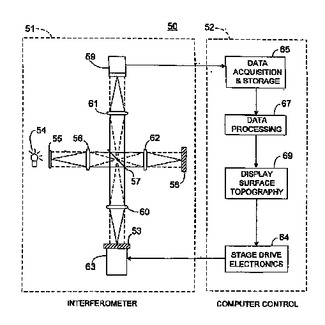 (もっと読む)
(もっと読む)
光ビームで機械部品の位置をチェックする方法およびシステム
チェッキング方向(X)に沿って機械部品(2)、たとえば旋盤の工具の位置をチェックする方法およびシステムは、レーザビーム(7)、およびビームの中断を検出するセンサ(8)を有するオプトエレクトロニクス・デバイス(1)を使用する。チェッキング領域(13)におけるチェックされる部品とオプトエレクトロニクス・デバイスとの間の相互変位は、チェッキング方向に垂直な方向(Z)に沿った線形検査運動(30)および検査位置(Pi;P1〜P4)を含むシーケンスに従って制御される。検査位置は、サーチされる位置(PN)へ収束するシーケンスに従って、累進的に縮小する相互間の距離(D)だけチェッキング方向に沿って離される。  (もっと読む)
(もっと読む)
レーザ加工ビームを用いてワークピースを遠隔処理する装置
レーザ加工ビーム(4)を用いてワークピース(2)を遠隔処理する装置には、プログラマブル数値制御部(12)をもつオペレーティング装置(11)を備えたスキャナ光学系(6)が設けられている。数値制御部(12)は、ワークピース(2)上の少なくとも1つの加工位置(3a,3b,3c,3d)をマークするためのポインタマーク(14)を備えたポインタ(13)を利用してプログラミングされる。その際、加工位置(3a,3b,3c,3d)をマークしているポインタマーク(14)を検出する手段(15)と、スキャナ光学系(6)のためのオペレーティング装置(11)の数値制御部(12)と接続された評価手段(18)が用いられる。スキャナ光学系(6)のためのオペレーティング装置(11)の数値制御部(12)に対する設定値を、加工位置(3a,3b,3c,3d)をマークしているポインタマーク(14)の検出に基づき評価手段(18)によって規定することができる。この設定値は、以降のワークピース処理についてスキャナ光学系を調節するために用いられる。  (もっと読む)
(もっと読む)
機械部品の位置を検査するための装置および方法
【課題】機械部品の存在を検出するための装置、より具体的には、長尺工具の完全性を検査するための装置を提供する。
【解決手段】工具の完全性を検査するための装置は、レーザ光線(21)を用いる光電子検査機構(7)と、工具と光電子検査機構との間の相対的な移動を可能とする長手方向(X)に沿って移動可能な載置台(6)と、例えば送受波器(9、10)を含む前記相対的な位置を検査するための装置と、を備えている。光電子検査機構のセンサ(22)は、光線の遮光を検出する。この遮光時の送受波器の信号に基づき、これを既知の値と比較することによって、工具の完全性が検査される。載置台に連結された光電子検査機構の連結機構(24)は、横方向基準面に沿って光電子検査機構を振動させることができ、この振動により感知可能な画定領域(33)が画成される。振動はモータ(26)により制御され、光線の遮光はセンサにより検出されて、該センサにより工具の端部が感知可能な画定領域に干渉する瞬間が示される。  (もっと読む)
(もっと読む)
計測学ツール較正方法および装置
計測学ツール較正方法および装置が開示される。前記装置は、その上に形成された少なくとも一つの較正サイトを備える。前記較正サイトは、基板の表面に配置された少なくとも一つのフィーチャーを有するセルのパターンを含む。前記フィーチャーは、ステップ高さ計測学ツールと位相計測学ツールを較正するために、ステップ高さ計測学ツールと位相計測学ツールによる計測に供される。  (もっと読む)
(もっと読む)
基準パターン抽出方法とその装置、パターンマッチング方法とその装置、位置検出方法とその装置及び露光方法とその装置
テンプレートマッチングのために有効な基準パターンを適切に効率良く抽出することのできる基準パターン抽出方法を開示する。本発明において、ウエハを撮像して得た画像情報上の観察視野(VIEW_Area)となり得る最大の範囲である最大視野範囲(OR_Area)内において、ユニークさが互いに異なり、かつ、その最大視野範囲(OR_Area)内に任意に配置される観察視野(VIEW_Area)内においてもユニークであると認識されるユニークなパターンを複数抽出する。そして、抽出されたユニークなパターンの全てを、観察視野(VIEW_Area)が取り得る範囲とは無関係に、基準パターン(テンプレート)として設定する。各ユニークパターンは、各々がユニークなパターンであるエレメント、又は、ほぼユニークなパターンであるエレメントの組み合わせにより表される。  (もっと読む)
(もっと読む)
寸法測定装置
【課題】ディスク収納ユニットを精度よく、しかも容易に測定できるディスク収納ユニットの寸法測定装置を提供する。
【解決手段】複数枚のディスク収納棚で構成されたディスク収納ユニットの寸法測定装置において、ディスク収納ユニットを水平に保持する保持手段と、ディスク収納ユニットにおける複数枚のディスク収納棚の先端部の水平部を撮像するCCDカメラと、CCDカメラを固定する固定部と、固定部を上下方向へ移動させる移動手段と、固定部の移動距離を表示する表示手段とを有する測定器と、CCDカメラの映像をコントロールするコントロールユニットと、CCDカメラの映像を表示する画面を有し、画面の略中央部に基準線が設けられた映像表示部とからなり、CCDカメラを移動させ基準線と先端部との距離関係を映像表示部に表示してなることを特徴とする。
(もっと読む)
541 - 556 / 556
[ Back to top ]