
Fターム[2F065QQ52]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | カウンター (263) | カウント開始点 (7)
Fターム[2F065QQ52]に分類される特許
1 - 7 / 7
5自由度誤差測定装置
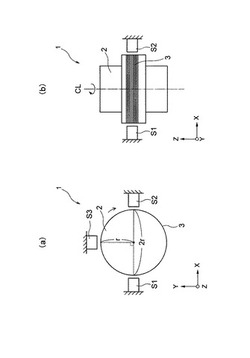
【課題】回転体の回転に伴って生じる都合5軸方向の運動誤差を高精度で測定することのできる5自由度誤差測定装置を提供する。
【解決手段】回転体2の外周面に回転体2の回転軸の方向に一定の間隔を置いて設けられた複数の周溝から形成された回折格子面3を設け、回転体2の径方向に相当するセンサ座標系第1軸と回転体2の軸方向に相当するセンサ座標系第2軸に沿った回折格子面の相対移動変位を検出する2軸干渉センサユニットS1,S2,S3を回転体2の外周面から径方向外側に間隙をおき、かつ、相互に重合しないようにして回転体2の周方向の相異なる少なくとも3つの位置に固定配備し、3つの2軸干渉センサユニットS1,S2,S3のセンサ座標系第1軸の干渉信号とセンサ座標系第2軸の干渉信号に基いて都合5軸方向の運動誤差Δx,Δy,Δz,Δu,Δvを同時に求める。
(もっと読む)
寸法測定装置

【課題】搬送する物品の載置状態や搬送速度が一定でない場合でもそれに影響されることなく、搬送中の物品の寸法を正しく測定することができる寸法測定装置を提供する。
【解決手段】物品を搬送する搬送装置を備えた寸法測定装置であって、前記搬送装置の搬送方向に沿って所定間隔をおいて配置され、該搬送装置で搬送される物品を検出する複数個の物品検出センサと、前記搬送中の物品の所定位置の両側端部を検出する側端部検出センサと、前記側端部検出センサの一定時間間隔で検出した信号について、一つの物品検出センサが物品を検出してから次の物品検出センサが前記物品を検出するまでの信号を前記の物品検出センサ間の距離に応じた位置に記憶し、少なくとも物品の側端部を前記側端部検出センサが検出しなくなるまで記憶するメモリと、前記メモリのデータから物品の外形寸法を算出する寸法算出手段と、を備える。
(もっと読む)
ねじパラメーター測定の方法及びデバイス
空間座標系(X’、Y’、Z’)を規定するねじ付きの物体の形状を取り込む光学センサー(5)を組み入れている、空間基準システム(X、Y、Z)を規定する、測定デバイス(1)を用いて、該測定デバイス(1)は該空間基準システム(X、Y、Z)内で該ねじ付き物体を表す2次形式を記述する第1マトリックスを組み立てるコンピュータを有し、かくして該2つの空間座標系間の関係を提供する、該測定デバイスによるねじ付き物体(3)のねじパラメーターの測定方法。該方法はa)該ねじ付き物体上で該少なくとも1つの光学センサー(5)の少なくとも1つの軌跡を事前規定する過程であって、該軌跡に沿って該測定点が、該測定点の値で評価された該マトリックスが、該マトリックスが最大階数を有する条件を満足させるよう選択される、該事前規定する過程と、b)該少なくとも1つの光学センサー(5)により前記少なくとも1つの軌跡に沿う第1走査動作を行い、該事前規定された測定点のデータを取り込む過程と、c)これらのデータを該第1マトリックスに供給し、該第2空間座標系に対する該ねじ付き物体の相対位置を規定するために該第1空間座標系を該第2空間座標系に関係付ける軸変換マトリックスを計算する過程と、d)該第2空間座標系から取り込まれた全データを該第1空間座標系へ変換するために該軸変換マトリックスを使用する過程と、を具備する。 (もっと読む)
外観検査装置
【課題】1組の光源とラインセンサ型カメラによって欠陥の検出に加え、欠陥の種別の判別も行う。
【解決手段】一定方向に送られる被検査物5の表面に斜光照明を行うライン状光源2と、該光源からの光の被検査物表面での反射光を捕らえるラインセンサ型カメラ1と、上記カメラの出力画像の明暗から欠陥を検出する画像処理回路3とからなる。上記光源の光軸L2と被検査物表面との交点の位置を、上記カメラの光軸L1と被検査物表面との交点の位置からずらして、上記光源の光軸と被検査物表面とがなす角度αよりも、上記光源からカメラの光軸と被検査物表面との交点の位置に至る光が被検査物表面とがなす角度α’を小さくする。
(もっと読む)
錠剤の形状及び組成の連続検査装置
【課題】砕け易い錠剤を用いた場合であっても、錠剤を破損させることなく、高速で錠剤を計数することができ、しかも、大量の錠剤におけるそれぞれの錠剤の形状及び組成の検査を行うことができる、錠剤の形状及び組成の連続検査装置を提供する。
【解決手段】斜めに傾けた回転円盤(2) の最下端部位に錠剤供給部(6) を配設し、回転円盤(2) の下降回転側に、一度に大量の錠剤を排出できる錠剤排出部(9) を 配設する。錠剤供給部(6) と錠剤排出部(9) との間に、検査ステージ(7) を配設する。回転円盤(2) の径方向に複数配設して形成した錠剤保持孔(4a)を、回転円盤(2) の外周縁側に沿って複数配設する。そして錠剤保持孔(4a)を、回転円盤(2) の周方向において等間隔に配した複数のブロック(B) 単位に区分けし、各ブロック単位内には同じ個数の錠剤保持孔(4a)を配設する。
(もっと読む)
形状測定装置,形状測定方法
【課題】円盤状の半導体ウェーハ等の端面の形状をその投影像に基づき測定する際に,その端面の付着物の影響を受けずに形状測定を行えること。
【解決手段】ウェーハ1を支持する回転支持機構9により,ウェーハ1を所定の基準支持位置に対し+δ度回転させた第1の支持位置から−δ度回転させた第2の支持位置までの範囲における前記第1の支持位置及び前記第2の支持位置を含む2つ以上の支持位置で支持し,それら各支持位置で支持されたウェーハ1の端面の投影像をイメージセンサ7により撮像し,得られた複数の投影像それぞれについて端面形状の指標値を算出し,算出された複数の指標値に基づく1つの代表値の選択又は1つの集約値の算出を行うことにより前記基準支持位置に対応するウェーハ1の端面の形状の測定値を導出する。その際,ウェーハ1の半径及び端面の面取り幅をr,kとしたときにδ≧cos-1((r−k)/r)を満たすことが望ましい。
(もっと読む)
物体検出装置および物体検出方法
【課題】単一の物体を複数の小物体とみなしてしまうといった誤検出を抑制し、物体の検出精度の向上を図る。
【解決手段】フィルタ部3は、距離画像を構成する距離データのそれぞれの信頼性を評価し、この信頼性に基づいて、距離データから有効距離データと無効距離データとを抽出する。物体検出部4は、距離画像における有効距離データのヒストグラムに基づいて、検出対象となる物体を検出する。グループ検出部5は、距離画像上において、有効距離データが存在する領域を分離条件とした上で、互いに隣接した無効距離データをグループ化する。グループチェック部6は、グループ化されたグループの中から、個々のグループ内における無効距離データの統計結果を用いて、同一物体の一部分とみなすことができる同一物体グループを抽出する。物体修正部7は、複数の物体の間に同一物体グループが介在する場合、これらを1つの物体とみなす。
(もっと読む)
1 - 7 / 7
[ Back to top ]