
Fターム[2F077AA09]の内容
感知要素の出力の伝達及び変換 (32,270) | 目的、特徴、課題 (5,635) | 異常、故障、断線又は誤りの検出 (429) | 誤り訂正を行うもの (24)
Fターム[2F077AA09]に分類される特許
1 - 20 / 24
運動検出装置
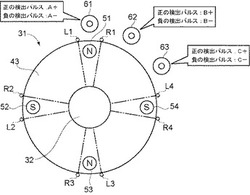
【課題】磁界検出部の個数を少なくすると共に、検出パルスの欠落が生じても回転数または周回数を正確に計数できるようにする。
【解決手段】被検出体と共に回転する可動部43には磁石51〜54が設けられ、可動部43の外周側には大バルクハウゼン効果により検出パルスを出力する磁気センサ61〜63が設けられ、磁石51〜54および磁気センサ61〜63の配置は、磁石51〜54において、可動部43が右回転する間に各磁気センサ61〜63の磁化の方向を反転させる点を右回転反応点R1、R2、R3、R4とすると、磁気センサ61〜63のうちの1つの磁気センサが上記右回転反応点のうちの1つと向かい合うとき、磁気センサ61〜63のうちの他の各磁気センサが上記右回転反応点のいずれとも向かい合わない等の条件を充足するように設定されている。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置

【課題】高精度に被検出部の回転角度を検出可能な回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10のブリッジ回路部11、12は、被検出部の回転角度に応じてインピーダンスが変化するセンサ素子21〜28により構成される複数のハーフブリッジ14〜17を有する。制御部51は、複数のハーフブリッジから出力される出力信号を取得し、位相ずれαを補正するための位相補正値φを出力信号の組合せ毎に算出し、メモリ部52に記憶する。制御部51は、出力信号の一部に異常が生じた場合でも、異常が生じていない出力信号の組合せに対応した位相補正値φに基づき、補正前回転角度θを補正する。これにより、位相補正値φに基づいて補正前回転角度θを補正するので、センサ素子の実装ずれ等があっても、高精度に被検出部の回転角度δを算出することができる。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】高精度に被検出部の回転角度を検出可能な回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10のブリッジ回路部11、12は、被検出部の回転に応じて変化する回転磁界を感知し被検出部の回転角度に応じてインピーダンスが変化するセンサ素子21〜28により構成される複数のハーフブリッジ14〜17を有する。制御部51は、複数のハーフブリッジ14〜17から出力される出力信号をハーフブリッジ14〜17毎に取得し、位相ずれαを補正するための位相補正値φを算出する。メモリ部52は、位相補正値φを記憶する。制御部51は、位相補正値φに基づき、補正前回転角度θを補正する。これにより、位相補正値φに基づいて補正前回転角度θを補正するので、センサ素子21〜28の実装ずれ等があっても、高精度に被検出部の回転角度δを算出することができる。
(もっと読む)
回転角度検出装置
【課題】故障によって、1つの磁気検出部の出力信号しか得られなくなったとしても、回転角度を検出することが可能な回転角度検出装置を提供する。
【解決手段】磁石と、磁気検出部と、算出部と、を備える回転角度検出装置である。磁気検出部は、出力信号の位相差が90°(270°)異なるように互いに離れて設けられた第1磁気検出部と第2磁気検出部とを有する。算出部は、第1磁気検出部から出力される正弦波信号に基づいて余弦波信号を生成する第1生成部と、第2磁気検出部から出力される余弦波信号に基づいて正弦波信号を生成する第2生成部と、を有する。そして、算出部は、第1磁気検出部と第2生成部それぞれから出力される正弦波信号のうち正常な1つの正弦波信号と、第2磁気検出部と第1生成部それぞれから出力される余弦波信号のうち正常な1つの余弦波信号とに基づいて、回転体の回転角度を演算する。
(もっと読む)
エンコーダ
【課題】絶対位置を検出する処理を省電力化するエンコーダを提供する。
【解決手段】符号板(10)の移動方向に形成され、最低識別幅λのパターン幅を有し、絶対位置を識別するN(Nは自然数)次のアブソリュートパターン(11)と、アブソリュートパターン(11)のうち移動方向に連続する(N+1)個以上の連続パターンによって示される範囲を第1の検出領域と定め、第1の検出領域を検出可能な検出部と、を備え、検出部は、符号板(10)の移動に応じて、第1の検出領域から選択された選択パターンによって示される第2の検出領域を検出する。
(もっと読む)
位置検出装置及びシフト装置
【課題】磁石の着磁パターン等を含む構成の簡素化及び体格の小型化を図りつつ、位置検出に対する信頼性を確保することができる位置検出装置及びシフト装置を提供する。
【解決手段】シフトレバーに連動して直線的に変位する磁石14は、その変位方向に対して交わる方向に2極着磁された第1の磁極部31と、当該変位方向に沿って多極着磁された第2の磁極部32とを備える。また、第1の磁極部31に対応する複数個の磁界方向検出型の磁気センサ、及び第2の磁極部32に対応する複数個の単極検出型の磁気センサも備える。磁界方向検出型の磁気センサは磁石14の変位に伴う磁界方向の変化に応じた、また単極検出型の磁気センサは対応する磁極の極性に応じた二値信号をそれぞれ生成する。各磁気センサにおいて生成される二値信号の組み合わせは、ハミング符号に準拠する。
(もっと読む)
コントローラおよび加工装置
【課題】高速で運動する物体の位置の検出および/または制御に有利な技術を提供する。
【解決手段】エンコーダから提供される互いに位相が異なる2つの周期信号に基づいて物体の位置を検出しながら前記物体の駆動を制御するための駆動指令を発生するコントローラは、前記2つの周期信号のいずれか一方の周期をカウントするカウンタと、前記2つの周期信号の値の比のアークタンジェント値と前記カウンタから提供されるカウント値とに基づいて前記物体の位置を検出し、その位置に基づいて前記駆動指令を発生する演算部とを備える。前記演算部は、前記アークタンジェント値と前記カウント値とに基づいて計算される前記物体の加速度と過去に発生した前記駆動指令とに基づいて前記カウント値の誤りを補正し、その補正されたカウント値に基づいて前記物体の位置を計算する。
(もっと読む)
位置検出装置及びそれを利用した装置
【課題】簡単にパルスのカウントミスを検出するインクリメンタルエンコーダを提供する。
【解決手段】測定対象に接続され、測定対象の変位量を検出するインクリメンタルエンコーダは、スケールを同時に検出してパルス信号をそれぞれ出力する第1及び第2のヘッドと、第1のヘッドの出力からパルス信号の第1のパルス数を計数する第1のカウンタと、第1のパルス数から測定対象の第1の変位量θ1を算出する第1の算出部と、第2のヘッドの出力からパルス信号の第2のパルス数を計数する第2のカウンタと、第2のパルス数から測定対象の第2の変位量θ2を算出する第2の算出部と、第1及び第2の変位量θ1、θ2を格納するメモリと、第1のヘッドが第1の変位量θ1を次に検出したときに第2のヘッドが検出したスケールの変位量と第2の変位量θ2との差が許容範囲外であると判断した場合に異常である旨を出力する異常判定部と、を有する。
(もっと読む)
ロータリエンコーダの動作異常判定精度向上方法
【課題】動作初期値にロータリエンコーダの個体差でばらつきがあっても、当該ロータリエンコーダの動作異常の判定精度を向上すること。
【解決手段】動作状態検出値がその動作の初期値から一定の範囲隔てた値(異常判定値)まで変動したとき動作異常であると判定する動作異常判定プログラムが設定されているロータリエンコーダ11に対してその動作異常の判定精度を向上させるため、ロータリエンコーダ11に、上記動作異常判定プログラムを実行するCPU37と、上記動作異常判定プログラムを書き換え可能に記憶するフラッシュメモリ39と、を備えさせ、上記動作異常判定プログラム内に書き込まれている初期値(第1初期値)が外部測定した初期値(第2初期値)と相違するときには、動作異常判定プログラムに書き込む初期値を第1初期値から第2初期値に書き換えると共に第2初期値から一定の範囲隔てた値に異常判定値を書き換える。
(もっと読む)
検出信号処理回路
【課題】センサからの信号出力線の断線による回転方向の誤検出を防止する。
【解決手段】信号出力線44が断線すると、定電流回路54の作用によりノードN2の電圧が0Vに固定され、断線検出信号SbはLレベル(断線)になる。これにより、ANDゲート53はレベル変換回路65への検出信号B1の入力を遮断し、トランジスタ61、62はオフとなる。その結果、回転検出信号SrはHレベル一定となり、判定信号D1、D2はともにLレベル一定となる。ECU34は、この状態で断線を検知できる。
(もっと読む)
指示要素及び磁気回転角センサ
【課題】最適な磁場特性及び低コストの製造が達成できる磁気回転角センサ用の指示要素及び関連する磁気回転角センサの提供。
【解決手段】磁気回転角センサ(120)用の指示要素(100)は磁場プローブ(122,126,128)を具備し、磁場プローブは、磁場プローブに対する指示要素の幾何学的位置に応答してセンサ信号を発生する。指示要素は、複数の部分(102,104,106,116,118)からなる環状断面を有する永久磁石を有する。複数の部分の磁化は、磁場プローブが配置できる均一な磁場が永久磁石の内部領域(112)に形成されるように異なる方向(110)を向く。本発明はまた、この種の指示要素を具備する磁気回転角センサに関する。
(もっと読む)
回転速度検出装置
【課題】回転体の軸ぶれによる検出精度低下を抑制した回転速度検出装置を提供する。
【解決手段】電動機付ターボチャージャ1の回転体41、51、8、6の回転速度を検出する回転速度検出装置10において、コンプレッサブレードとの距離を検出するギャップセンサ12と、コンプレッサブレードの回転位置がギャップセンサ12と対向する位置となる毎にギャップセンサ12の出力信号中に現われるピーク値の現出時刻に基づいて、回転体41、51、8、6の回転速度を演算する回転速度演算手段と、を備える。
(もっと読む)
二次元エンコーダ、及び、そのスケール
【課題】二次元のリニアスケールに適用可能な二次元のABSパターンを持った高信頼性、高精度、高分解能の二次元エンコーダを提供する。
【解決手段】スケール上のビットパターンの画像を検出器で取得して、スケールと検出器の相対変位を検出するようにされたエンコーダにおいて、共通の部分を持つように変調されたビットパターンを、第1の方向に配置すると共に、同じビットパターンを、1ビット分ずつずらして、第1の方向と直交する第2の方向にも配置する。
(もっと読む)
回転角検出装置
【課題】 片方のレゾルバセンサが故障した場合でも、正常側のレゾルバセンサを用いて絶対角を検出する。
【解決手段】 回転部材を回転可能範囲にわたって回転させたときn回の周期波形信号を出力する第1レゾルバセンサとm(m≠n)回の周期波形信号を出力する第2レゾルバセンサとを備え、両レゾルバセンサの検出した相対角θa,θbの相対角差θabに基づいて回転部材の絶対角度θを算出する。また、回転部材の回転可能範囲を各レゾルバセンサの信号出力周期に応じた分割数で分割して得られる複数の分割領域のうちで、回転部材の回転位置が属する所属分割領域を各レゾルバセンサの信号出力の推移に基づいて導出する。片方のレゾルバセンサが故障したときには、正常側のレゾルバセンサの出力値と所属分割領域とから回転部材の絶対回転角度を算出する。
(もっと読む)
位置計測装置
【課題】電源瞬断等による誤ったパルスカウントを防止可能な位置計測装置を提供すること。
【解決手段】パルスエンコーダ19からの出力は、計数部21及びエッジ検出部22に入力される。エッジ検出部22は、A相パルス、B相パルス双方のパルスエッジを検出する。エッジ検出部22により検出されたパルスエッジは、異常検出部27に出力される。異常検出部27は、連続するパルスエッジの間隔が所定値以下(同時の場合も含む)のとき異常と判定する。異常と判定されると補正制御部26に異常状態が通知される。補正制御部26は、異常状態が通知されると、アルゴリズム記憶部28を参照することにより、異常状態と判定されたパルスエッジの現出順序に応じて補正処理を実行し、計数部21の計数値を補正する。これにより、電源瞬断時の異常パルスによる誤カウントを正常値に修正する。
(もっと読む)
運転制御装置
【課題】アブソリュートエンコーダセンサのフェール検出を自動的に行って、安全に対する信頼性の高い運転制御装置を得る。
【解決手段】運転制御装置は、操作レバーの変位量を回転体の回転量として検出すると共に、この回転量に対応して複数の異なる周期を持つパルス信号を出力するエンコーダセンサからの、複数のパルス信号に基づき積算してカウントするカウンタと、このカウンタのカウント数に基づいて操作レバーの位置を検出すると共に、検出されたレバー位置に基づいて運転制御を行う制御手段を備え、複数のパルス信号のうち、回転量に応じた最小周期を持つパルス信号の入力をトリガとして、カウンタのカウント数を取り込み、最小周期のパルス信号が入力されたにもかかわらずカウンタのカウント数が最小周期のパルス信号に応じた変化をしていない場合には、エンコーダセンサについて異常が発生していると判断する。
(もっと読む)
バッテリレス形多回転式絶対値エンコーダ装置
【課題】角加速度が大きい場合にも安定して回転が追従するとともに、停止時の誤回転を防止し、正確に多回転の絶対角度を検出することができる多回転式絶対値エンコーダ装置を提供することを目的とする。
【解決手段】被検出回転軸111に設けた第1のエンコーダと、前記被検出回転軸111に設けた永久磁石と、前記永久磁石の外周面が空隙を介して配置された第2の磁石ホイール142と、前記第2の磁石ホイール142のシャフト122に設けた第2のエンコーダとを備えた多回転の絶対角度を検出する多回転式絶対値エンコーダ装置において、前記永久磁石と前記磁石ホイール142に脱調防止ストッパ151,152を備えたものである。
(もっと読む)
位置表示装置
【課題】 所望の範囲を移動する対象物の位置を表示することができ、かつ、対象物の表示範囲を容易に変更することができる位置表示装置を提供することを目的とする。
【解決手段】 磁石の作用を受けて開閉する磁性素子ME1〜ME4と、発光ダイオードD1〜D4と、第1の方向から移動してきた磁石Mgの作用を受けると、開状態又は閉状態になり、第1の方向とは逆方向の第2の方向から移動してきた磁石の作用を受けるまで、前記状態を保ち続ける記憶スイッチMRとを備え、磁性素子ME1〜ME4及び発光ダイオードD1〜D4を一列に配置する。そして、磁性素子MEが磁石Mgの作用を受けて作動したときに、電流が流れる発光ダイオードDが点灯する。
(もっと読む)
絶対角検出装置
【課題】物理的要因によって信号位相がずれても回転角度を正確に検出できる絶対角検出装置を提供する。
【解決手段】複数のセクタを有し、各セクタは、第1コード列(6ビットグレイコード)と第2コード列(2ビットコード)との組合によって構成されており、第1コード列は、同一のコードが現れない第3コード列と読み始める桁を変えると同一のコードが現れる第4コード列とを有してグレイコードをなしており、各セクタにおける最初のコードと最後のコードとが1ビット変化する関係にあるように構成されると共に、各セクタ内において所定数のステップごとに一方向に1桁ずれるように構成され、かつ、各セクタ内において所定数のステップごとに最大にずれたコードをさらに一定方向に1桁ずらすと、ずれのない状態の第1コード列のコードとなるように構成されており、第2コード列は第4コード列を識別するように構成される。
(もっと読む)
絶対角検出装置
【課題】多回転体の回転を正確に検出可能で、フェールセーフ性に優れた機械的な減速機構を備えた絶対角検出装置を提供することにある。
【解決手段】絶対角検出装置を、1セクタ内の回転角度を所要の分解能で検出する回転角検出手段と、各セクタを識別するためのセクタ識別手段と、1のセクタとこれに隣接する他のセクタとを識別するための偶数セクタ/奇数セクタ判別手段とから構成する。偶数セクタ/奇数セクタ判別手段は、前記所要の分解能で各ステップのコードを出力する。各ステップごとに出力されるコードを出力順に並べることにより得られるコード順列は、予め定められた所定のステップ数の範囲内で少なくとも1回はコード符号が反転する単位コード順列の繰り返しからなり、偶数セクタと奇数セクタとで異なる単位コード順列の繰り返しを出力する。
(もっと読む)
1 - 20 / 24
[ Back to top ]