
Fターム[2F077JJ04]の内容
感知要素の出力の伝達及び変換 (32,270) | 磁気センサを用いた変換(計数型以外) (2,055) | 差動型 (15)
Fターム[2F077JJ04]に分類される特許
1 - 15 / 15
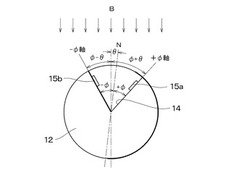
角度検出装置
【課題】温度変化による影響を受ける要因を演算により除去し、正確な角度測定を実施する。
【解決手段】シャフト12のV字溝14の両斜辺は中線Nを中心にその両側に角度±φだけ傾斜し、両斜辺にホール素子のセンサ15a、15bを取り付ける。一様な磁束密度Bの磁界内において、シャフト12を角度θ回転させると、センサ15a、15bの出力Va、Vbは、Ka、Kbをホール係数、da、dbを厚み、供給電流をIとすると、Va=(Ka/da)・I・B・sin(φ+θ)、Vb=(Kb/db)・I・B・sin(φ−θ)、(Va−Vb)/(Va+Vb)=(cosφ・sinθ)/(sinφ・cosθ)=tanθ/tanφとなり、tanθ=tanφ・(Va−Vb)/(Va+Vb)となり、tanθはKa、Kb、da、db、I、Bに無関係に求めることができる。
(もっと読む)
位置検出回路及びぶれ補正装置

【課題】基準電圧に起因する位置検出誤差をなくし、より高精度な位置検出結果を得ることができる位置検出回路及びぶれ補正装置を提供する。
【解決手段】バイアス出力生成部203a、203bは、ホール素子201a、201bから出力された信号に対して、基準電圧生成部202が生成する基準電圧に基づくバイアスをかけた信号を出力する。位置演算部200は、バイアス出力生成部203a、203bから出力された信号に基づいて、磁界発生部とホール素子201a、201bとの相対的な位置関係を示す信号であって、基準電圧に由来する成分を除去した信号を出力する。
(もっと読む)
操作位置算出装置
【課題】1つの磁石によって3方向の操作位置を検出する操作位置算出装置を提供する。
【解決手段】レバーコントロールスイッチ装置1の判定部5は、第1のMRセンサ40の第1のハーフブリッジ回路S1の第1の出力電圧V1と第3のMRセンサ42の第5のハーフブリッジ回路S5の第5の出力電圧V5との差分値と、第1のMRセンサ40の第2のハーフブリッジ回路S2の第2の出力電圧V2と第3のMRセンサ42の第7のハーフブリッジ回路S7の第7の出力電圧V7との差分値と、から逆正接値を算出することによって、操作部17のプッシュ操作位置を算出することができる。
(もっと読む)
位置検出装置およびそれに用いるコントローラ
【課題】センサヘッドのアクチュエータに対する取付作業を容易に行い得るようにする。
【解決手段】位置検出装置は、マグネットの磁力に感応して出力信号を出力する磁気センサ24が設けられたセンサヘッド20を有し、アクチュエータ本体の内部に移動自在に組み込まれたマグネット付きの移動部材の位置をアクチュエータ本体の外側で検出する。センサヘッド20には移動部材の位置に応じて点灯するLED25が設けられており、センサヘッド20にケーブルを介して接続されたコントローラ30には、磁気センサ24から出力された出力信号に基づいてLED25の点灯および消灯を制御する。
(もっと読む)
操作位置判断装置及びパドルシフトスイッチ
【課題】信号の切替位置のずれを抑制し、誤作動を防止する操作位置判断装置及びパドルシフトスイッチを提供する。
【解決手段】センサIC23、24から出力されたアナログ出力は、波形整形部2Aに出力され、波形整形部2Aは、アナログ出力をリニア出力に変換し、リニア出力V1及びV2をECU100に出力する。ECU100は、リニア出力V1及びV2に基づいて差分値ΔVを算出する。またECU100は、算出した差分値ΔVと内部に記憶するしきい値とを比較し、差分値ΔVがしきい値よりも大きいときHi、小さいときLo、として、切替位置を判断する。
(もっと読む)
位置検出装置
【課題】検出対象の変位位置を容易に検出することができる位置検出装置を提供する。
【解決手段】第1及び第2の磁気センサから出力される検出信号V1,V2は、磁石42のX軸方向への変位量に対する増減特性が相反するとともに、当該磁石42の変位量に応じて変化する。このため、2つの検出信号V1,V2の差分値δVは、磁石42のX軸方向への変位量に応じて直線的に変化する。すなわち、差分値δVはシフトレバーの操作量が反映されたものになるとともに、当該シフトレバーの操作位置に対して一対一で対応することから、当該差分値δVに基づきシフトレバーの操作位置を特定することが可能となる。また、第1及び第2の磁気センサは、所定の配置条件を満たすように配設されることから、前記差分値δVの直線性が好適に確保される。
(もっと読む)
変位検出装置
【課題】 磁性移動体1がそのストローク方向に対して垂直な方向に位置ズレした場合であっても、磁気センサ2の出力ズレの影響を抑制することを課題とする。
【解決手段】 磁性固定体には、磁気センサ2の中心部を通る対称軸線を中心にして対称的な形状となるように、コの字状の断面を有する第1、第2分割ブロック6、7が配置されている。そして、磁性移動体1の第1端面と磁気センサ2との間には第1エアギャップ(G1)が形成され、また、磁性移動体1の第2端面と第1、第2分割ブロック6、7の各対向部13、14との間には第2エアギャップ(G2)が形成されている。これによって、仮に磁性移動体1がそのストローク方向に対して垂直な方向に位置ズレした場合であっても、第1エアギャップ(G1)と第2エアギャップ(G2)とが互いにギャップ長の増減を補い合うため、磁気センサ2の出力ズレの影響を抑制することができる。
(もっと読む)
位置検出装置
【課題】磁界発生体と磁界変化検出素子との相対位置を検出する位置検出装置において、磁界変化検出素子が破壊又は故障した場合における誤動作を防止し、かつ磁界変化検出素子に過電流が流れて位置検出装置が破壊又は故障されることを防止して、装置の信頼性を向上させることが可能な位置検出装置を提供すること。
【解決手段】互いに離間して配置され、磁界発生体7との距離に応じた信号を出力する複数の磁界変化検出素子1、2からの信号の和を和信号生成回路4において演算し、演算した和信号を検出回路6に出力する。検出回路6は、和信号の設定値からの変動を検出し、該変動が所定時間以上継続した場合にその旨を示す信号を制御回路5に出力して制御回路5の動作を停止させる。
(もっと読む)
位置検出システム、位置検出システムを用いた光学系と撮像装置
【課題】複数の磁気式の位置検出装置を近接して配置しても、磁場の位置検出精度への相互干渉を抑えることができ、高精度かつ小型である位置検出システムを提供する事にある。
【解決手段】各位置検出装置の磁石の着磁方向ベクトルが同一平面上になく、かつ着磁方向ベクトルが直交化方向成分を有する様に磁石を配置し、動く磁石の着磁方向ベクトルの移動方向が他方の磁石の着磁方向ベクトルの対称面に含まれる様にする。同時に磁気センサが他方の着磁方向ベクトルの直交成分を検出できるようにする事が好ましい。
(もっと読む)
位置検出装置及び電動パワーステアリング用モータ
【課題】安価に製造可能でありかつ小さなスペースに設置可能な位置検出装置及び電動パワーステアリング用モータを提供する。
【解決手段】本発明の位置検出装置60によれば、従来の位置検出装置が多数のコイルを用いて位置検出を行っていたのに対し、1対のホール素子70A,70Bを用いて位置検出を行うことができる。これにより、従来より安価に製造することが可能になると共に、位置検出装置60の設置スペースも小さくすることができる。また、第1と第2の磁気回路C1,C2の間で中央突極67及び永久磁石66を兼用したので、この点においてもコンパクトかつ安価になる。従って、この位置検出装置60を備えたモータ20も安価に製造することが可能になり、高精度の制御を行うことができる。
(もっと読む)
無接触型直線変位検出装置
【課題】磁石と磁石による磁束を感受して電気信号に変換する磁気センサとが相対的に直線移動されるように配置されてなる無接触型直線変位検出装置において、演算器等を使うことなく簡単に直線的な出力が得られる無接触型直線変位検出装置を提供する。
【解決手段】磁気センサを、磁石と磁気センサの相対移動方向と平行な直線上に対向して配置される第1及び第2の磁気センサにより構成すると共に、磁石を第1の磁気センサと第2の磁気センサとの間において磁極面が上記直線に対して直交した状態に配置し、磁石と磁気センサの相対移動による第1の磁気センサ出力と第2の磁気センサ出力とを合成して出力する構成とする。この構成で、第1及び第2の磁気センサが感受する磁束密度は、磁気センサと磁石の距離の2乗に反比例する形となるが、その第1の磁気センサと第2の磁気センサの出力を合成するだけで、簡単に直線的な出力特性を得ることが可能となる。
(もっと読む)
制御された磁気漏洩の位置を判定するための磁気センサ
本発明は、変位の軸線(T)に沿う移動物体(2)の位置を判定する磁気センサに関する。当該センサは、少なくとも一つの間隙(8)を規定し、磁束を発生する手段(4)を備える開磁路(3)と、この磁路(3)に固定して取り付けられており、磁束値を測定可能な少なくとも一つの第1の測定セル(11)と、変位の軸線に沿う移動物体の直線位置を判定するために、測定セル(11)が供給する出力信号を処理する手段とを含む。本発明によると、磁路(3)は、磁束を発生する手段に関連付けられた少なくとも一つの磁極片(5)も含み、測定セル(11)は、磁束を発生する手段(4)が供給する磁束を漏洩磁束を差し引いて測定するように、変位の端点近傍に取り付けられている。  (もっと読む)
(もっと読む)
磁気検出装置
【課題】 部品点数を増やすことなく外乱磁界の影響を受けずに磁気検出を行うことができる磁気検出装置を提供すること。
【解決手段】 磁気検出装置10は、ホール素子1,2、実装基板3,4、アンプ5,6、差動出力回路7、検出磁石8などを備える。検出磁石8は、回転軸rに対して180度回転対称に配置される正磁極と負磁極の着磁領域を備える。ホール素子1,2は、実装基板3,4に実装された状態で検出磁石8からの磁界ベクトルの方向が同じで強度が異なる位置に配置される。そして、差動出力回路7は、アンプ5,6で増幅されたホール素子1,2からのホール電圧の差動をとった信号を出力する。
(もっと読む)
回転角度検出センサーの故障検出装置
【課題】ポジションセンサーのスタック故障等の故障をより確実に検出するとともに、この故障検出の制御をより的確に行う。
【解決手段】ホールICからなる第1および第2IC4a,4bのセンサー電圧値の合計と正常時の第1および第2IC4a,4bのセンサー電圧値の合計との差の絶対値が、隣接するレンジ間のレンジ間幅に基づいて設定された規定値と比較判断される。そして、この差の絶対値が、規定値より大きくなったときに第1および第2IC4a,4bの故障が検出される。これにより、第1および第2IC4a,4bのスタック故障等の故障を確実に検出することができる。
(もっと読む)
線形ホール効果センサを用いる位置センサ
磁場センサを含み、且つストローク方向を有する形式の位置センサにおいて使用するための磁場アセンブリ及びそれを構成する方法が開示される。磁場アセンブリにおける第1と第2の磁性体は、磁性板(帰還経路)の表面上に離間距離をもって互いに離間して位置する。第1の磁性体は磁性板の表面に実質的に沿う磁気軸を有し、且つ第1の磁性体は第2の磁性体の極性と反対の極性を有する。第1と第2の磁性体の厚さはストローク方向に沿って変化するように選択されており、且つ離間距離は、磁気センサと磁場アセンブリとの間のギャップ長さに従って選択されて、位置センサについて所定の磁束密度対ストローク特性が与えられるようにされている。  (もっと読む)
(もっと読む)
1 - 15 / 15
[ Back to top ]