
Fターム[2F077TT11]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | インピーダンス電気信号変換 (720) | ブリッジ回路を用いるもの (317)
Fターム[2F077TT11]の下位に属するFターム
Fターム[2F077TT11]に分類される特許
1 - 18 / 18
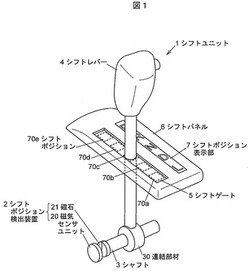
回転角度検出装置
回転検出装置
【課題】回転角度を算出することなく、回転軸が予め定めた角度に位置することを検出することができる回転検出装置を提供する。
【解決手段】シフトポジション検出装置1は、シャフト3の回転に伴って磁界の向きが変わるように配置された磁石21と、磁石21の磁界に応じて信号を出力し、シャフト3が予め定めた回転角度にあるときに出力する信号が切り替わるように配置されるMRセンサと、複数のMRセンサ200a〜200dの出力する信号が切り替わる回転角度がそれぞれ異なるようにMRセンサ200a〜200dを配置し、複数のMRセンサ200a〜200dの出力する信号の組み合わせに応じてシャフト3の角度範囲を検出するシフトポジション検出手段801とを有する。
(もっと読む)
磁気センサ信号処理プログラム及び磁気センサモジュール

【課題】システム全体の複雑化や高コスト化を招くことなく、回転角度を高い精度で検出することが可能な磁気センサ信号処理プログラム及び磁気センサモジュールを提供すること。
【解決手段】機械角が45°異なる2つのブリッジ回路から第1及び第2角度演算・識別信号V1、V2を入力する。次いで、第1及び第2角度演算・識別信号V1、V2を用いて回転角度Tの位相を判別する。さらに、回転角度Tの位相に応じて角度演算に用いる信号の切り替えを行い、第1及び第2角度演算・識別信号V1、V2のいずれか一方を用いて三角波近似により回転角度Tを算出する。
(もっと読む)
回転角度センサー及び回転角度センサーユニット
【課題】 360°の角度の絶対位置検出を行う回転角度センサーについて、素子の方向性を容易に判別できるようにし、簡便な製造方法で製造歩留りを向上する回転角度センサーを提供する。
【解決手段】 磁気抵抗素子を有する基板と、前記磁気抵抗素子を接続してブリ
ッジ回路を構成する配線基板と、前記基板と配線基板を備えたセンサーホルダー
を有し、前記センサーホルダー上に前記基板を4の倍数有するとともに、少なく
とも一組の基板が配線基板面上で80°〜100°傾けて配置されることを特徴
とする回転角度センサーを用いる。
(もっと読む)
磁気エンコーダ
【課題】小型化を維持したまま磁石体の移動方向を検出し得る磁気エンコーダを提供すること。
【解決手段】移動方向に沿ってN極とS極とからなる複数の磁極が交互に着磁された磁石体11と、磁石体11の近傍に移動方向に沿って対向配置された複数の磁気抵抗効果素子R11〜R23からなる磁気センサとを具備し、複数の磁気抵抗効果素子R11〜R23は直列接続されてその一端を電源端子T1に接続し、他端をグランド端子T2に接続する一方、該複数の磁気抵抗効果素子R11〜R23を同数ずつに分ける中点を出力端子TOとし、該中点よりも電源端子T1側の磁気抵抗素子R11〜R13と、グランド端子T2側の磁気抵抗素子R21〜R23とが、移動方向に沿って交互に配置されてなり、前記出力端子TOから出力されるパルス電圧が、前記磁石体11の移動とともに増大するか、減少するかを検出して前記磁石体11の移動方向を検知する磁気エンコーダ。
(もっと読む)
角度センサ、その製造方法及びそれを用いた角度検知装置
【課題】高出力、高精度で動作温度範囲の広い角度センサ及び角度検出装置を提供する。
【解決手段】強く反強磁性的に結合した2層の強磁性膜からなるセルフピン型強磁性固定層を用いたスピンバルブ磁気抵抗効果膜から第一から第八のセンサユニット511,522,523,514,531,542,543,534を作製する。それぞれのセンサユニットは、90°異なる角度に着磁した薄膜形成とパターニング、絶縁膜形成を経て作製する。強磁性膜にはキュリー温度の近いCoFe及びFeCo膜を用いて磁化量の差分をゼロにすることで、高い外部磁界耐性と広い温度適応範囲、高い出力を実現する。
(もっと読む)
磁気リニア測定装置
【課題】MR素子部の占有面積が小さくなり、センサ部の形状を小さくすることができるとともに、MR素子部に加わる応力による抵抗値の変化を抑制することができ、MR素子部の基材としてガラスを使用することができる磁気リニア測定装置を提供する。
【解決手段】MR素子16は、強磁性体金属の蒸着薄膜によって磁気抵抗効果を奏する同じ抵抗パターンR1,R2が形成された2つの基材20,21が、抵抗パターンR1,R2がピストン13と一体移動する磁石Mの移動方向に沿って並ぶように基板22上に実装されるとともに、2つの抵抗パターンR1,R2が電気的に直列に接続されている。MR素子16及びMR素子16の出力を処理するアナログ増幅回路17が回路基板15に実装されている。
(もっと読む)
増幅回路
【課題】作製が容易で、磁気センサから出力された出力信号に基づいて線形性の高い増幅信号を出力する増幅回路を提供する。
【解決手段】センサ装置1は、MRセンサ2と、差動増幅回路3と、を備えている。差動増幅回路3は、磁気抵抗素子で作製された第5及び第6のMR素子(R1)31、32と第7及び第8のMR素子(R2)33、34を有しており、MRセンサ2から出力される出力電圧V1、V2の差分V1−V2を増幅率R2/R1によって増幅する。この増幅率R2/R1が、磁界の角度の関数であるので差動増幅回路3は、線形性の高い出力電圧Voutを出力することができる。
(もっと読む)
回転角度検出装置及びその初期設定方法
【課題】演算負荷を抑えつつ、主動歯車と従動歯車との間のバックラッシに起因する検出誤差を低減することができる回転角度検出装置及びその初期設定方法を提供する。
【解決手段】正方向誤差(回転角度α1,β1)を求める段階(S1−2〜S1−5)、逆方向誤差(回転角度α2,β2)を求める段階(S1−6〜S1−9)、正方向誤差と逆方向誤差との平均値(回転角度αave,βave)を求める段階(S1−11)、主動歯車14の回転角度が0°となる誤差を含まない理論的な第1及び第2の従動歯車15,16の回転角度α0,β0と前記平均値との差(オフセット値αofs,βofs)を求める段階、被検出物の回転角度θを求める際に、実際に検出された第1及び第2の従動歯車15,16の回転角度α,βに加算される補正データとしてオフセット値αofs,βofsを記憶する段階を経て、回転角度検出装置11の初期設定を行うようにした。
(もっと読む)
磁気センサ
【課題】 感度を向上することができる磁気センサを提供すること。
【解決手段】 基板11上に形成され、2個のスピンバルブ型磁電変換素子からなるハーフブリッジを少なくとも1つ含む検出部113と、検出部113に対して近接配置され、被検体200の影響を受けて磁界が変化する磁石120とを備える磁気センサ100であって、ハーフブリッジ111(112)を構成するスピンバルブ型磁電変換素子10,11(12,13)を、各素子10,11(12,13)に作用する磁界の向きが互いに略逆向きとなるように、磁石120に対して配置した。
(もっと読む)
磁気エンコーダ
【課題】 回転磁界検出型の磁気エンコーダの検出精度を向上することのできる構成を提供すること。
【解決手段】 磁気エンコーダ1において、磁気スケールとしての永久磁石20では、移動方向に沿ってN極とS極が交互に並ぶトラック21が3列、形成されている。永久磁石20では、トラック21A、21B、21Cの幅方向の縁部分211では、面内方向の向きが変化する回転磁界が形成されており、トラック21A、21B、21Cの境界部分212に対して磁気センサ15のセンサ面16を面対向させている。
(もっと読む)
補償機能を備えた角度検出センサ
【課題】 出力角度に含まれる位相誤差や歪み誤差を近似する位相補償値(Δφα)comp及び歪み補償値(Δφβ)compを容易に得ることが可能な補償機能を備えた角度検出センサを提供する。
【解決手段】 第1の関数演算手段14の出力角度φを離散フーリエ変換すること、位相補償係数α0および歪み補償係数β0を容易に得ることができ、これらの値はメモリ手段15に記憶されている。制御手段11が前記位相補償係数α0を読み出して位相補償値(Δφα)compを生成し、また歪み補償係数β0を読み出して歪み補償値(Δφβ)compを生成する。前記出力角度φを前記両補償値(Δφα)comp及び(Δφβ)compで補償することにより、角度検出センサ100から出力される出力角度φOUTの精度を高めることが可能となる。
(もっと読む)
回転角度検出装置、回転角度検出方法およびX線コンピュータ断層撮影装置
【課題】 比較的低精度の信号生成手段を用いた場合であっても回転角度を高精度に検出でき且つ演算上の誤差を低減する。
【解決手段】 学習段階において、定速回転中に光学式センサ10から検出信号S2が出力された時を基点に、ゼロクロス点検出回路15からゼロクロス検出信号S4が順次出力されるまでの各時間間隔Tnを計測し、その計測した各時間間隔Tnを角度に変換して得られる学習角度θnをメモリ20に記憶する。その後の検出段階において、ゼロクロス検出信号S4が出力されるごとに当該ゼロクロス検出信号S4に対応した学習角度θnに相当するカウント値N(θn)を角度カウンタ24にセットし、ゼロクロス検出信号S4相互間では、角度カウンタ24は、角度変化率演算部26により演算した直前の期間の角度変化率に応じた周波数を持つクロック信号S6をカウントする。
(もっと読む)
位置決め装置
【課題】 位置検出に係るマイコンの処理時間を大幅に削減する。
【解決手段】 被駆動部材の移動量を第1の目盛で計測する第1の検出手段と、該被駆動部材の移動量を該第1の目盛より間隔の細かい第2の目盛で計測する第2の検出手段とを設け、該被駆動部材を所望の目標位置へ向けて駆動するとともに、該目標位置までの移動残量に応じて該第1の検出手段と該第2の検出手段とを切り換えて用い、該被駆動部材が前記目標位置に到達したことを検出したとき該被駆動部材を停止させる。
(もっと読む)
回転検出装置
【課題】 磁気センサの取り付け誤差によらず正確に回転を検出できる回転検出装置を提供する。
【解決手段】 第1〜第4磁気抵抗素子ブリッジ31、32、33、34の出力値V1,V2,V3,V4から、差動増幅回路50で差動出力Vdを、Vd=2(V3−V4)−α(V1−V2)との式によって算出する。このαの値を調整することで、ギヤ歯を検出するタイミングを、ギヤ歯12aの片側のエッジに対して所望の回転角度の差に設定することができる。このため、磁気センサ(基板)30がロータ12、バイアス磁石14、ICチップ20に対して取り付け誤差があっても、ロータのギヤ歯12aを検出するタイミングをギヤ歯12aの片側のエッジに対して所望の回転角度差に設定することで、ロータ12の回転角度を正確に検出することが可能になる。
(もっと読む)
位置決定装置
本発明は、少なくともほぼ棒形状輪郭の長手方向軸に平行に延びる少なくともほぼ直線の運動座標に沿う少なくともほぼ棒形状輪郭を有する磁石装置の磁界中で磁界感応センサユニットの位置を決定する装置において、磁界感応センサユニットが少なくともほぼ棒形状輪郭の長手方向軸に少なくともほぼ平行な平面に延びる磁界の成分をこの長手方向軸に少なくともほぼ直角な方向から測定するように構成され、磁石装置は少なくともほぼ棒形状輪郭の第1端部領域にN極を持ち、少なくともほぼ棒形状輪郭の第2端部領域にS極を持ち、さらにN極とS極との間に延びる中間領域内に少なくともほぼ棒形状輪郭の狭小部を持っていることを特徴とする。これによって、位置測定のために使用できる範囲が拡張され、利用性の良好な磁石装置を構成することができる。  (もっと読む)
(もっと読む)
集積磁気抵抗速度および方向センサ
集積回路磁気抵抗速度および方向センサが、その方法およびシステムと共に開示される。説明するセンサには、一般にAMR(異方性磁気抵抗)ブリッジ回路が利用されている。この技術を使用することにより、従来のホール効果素子に基づくセンサと比較すると、エアギャップ性能を大きくすることができる。AMRセンサは、1つまたは複数の磁極を使用して、所望の動程に沿って磁化されたリング磁石または棒磁石を検出することができる。磁石の極数は、アプリケーションの設計に基づいて最適化しなければならない。AMRセンサのAMRブリッジ設計によれば、オフセットが最小化され、最適性能のセンサが得られる。速度および方向情報を得るために、2つのブリッジ回路を互いに近接して配置できる(即ちターゲットおよび所望の性能に基づいてブリッジの正確な位置および形状を決定きる)。シリコン上の同じ場所に配置された集積電子工学上で2つのブリッジ回路の信号を比較できる。これらのブリッジは、通常、オフセットを小さく、および/または除去するために45度回転し、エアギャップ性能が大きいセンサを提供する。  (もっと読む)
(もっと読む)
センサ装置
【課題】 本発明は、運動可能な構造要素、特にアクチュエータによって運動可能な調整要素の行程を検出するためのセンサ装置を提供する。
【解決手段】 能動コイル18.1とこれから離間した少なくとも一つの受動コイル26.1、26.2とを有する固定コイル装置18を有し、このコイル装置が給電部30と信号検出部29とに接続されており、主に磁性材料からなる軸線方向に運動可能な棒状センサ部品17が、軸線方向で往復運動可能な調整要素と結合されており、かつそれぞれ末端稜23.1、23.2によって縦方向で限定された低オーム抵抗の導電性材料からなる少なくとも一つの短絡素子23、23.0を備えており、所定の行程高さhによって定義された少なくとも一つの末端位置I、IIのとき前記少なくとも一つの短絡素子23の一方の末端稜23.1、23.2、23.3が能動コイル18.1によって取り囲まれ、かつ前記少なくとも一つの短絡素子23、23.0の他方の末端稜23.1、23.2、23.3が前記少なくとも一つの受動コイル26.1、26.2の一つによって少なくとも部分的に包持されるように、運動方向における短絡素子の伸長が量定されている。
(もっと読む)
1 - 18 / 18
[ Back to top ]