
Fターム[2F077TT13]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | インピーダンス電気信号変換 (720) | ブリッジ回路を用いるもの (317) | 2素子型(隣接辺) (62)
Fターム[2F077TT13]に分類される特許
1 - 20 / 62
回転検出装置
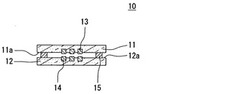
【課題】回転状態の検出感度の低下が抑制された回転検出装置を提供する。
【解決手段】複数の磁電変換素子(13,14)を有するセンサチップ(10)と、中空内にセンサチップ(10)が設けられた筒状磁石(30)と、を有し、被検出体の回転による筒状磁石(30)の形成する磁界の変化を磁電変換素子(13,14)によって検出することで、被検出体の回転状態を検出する回転検出装置であって、センサチップ(10)は、磁電変換素子(13)の形成された半導体基板(11)と、磁電変換素子(14)の形成された半導体基板(12)と、を有し、2つの半導体基板(11,12)が接合部材(15)を介して接合されている。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置

【課題】高精度に被検出部の回転角度を検出可能な回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10のブリッジ回路部11、12は、被検出部の回転角度に応じてインピーダンスが変化するセンサ素子21〜28により構成される複数のハーフブリッジ14〜17を有する。制御部51は、複数のハーフブリッジから出力される出力信号を取得し、位相ずれαを補正するための位相補正値φを出力信号の組合せ毎に算出し、メモリ部52に記憶する。制御部51は、出力信号の一部に異常が生じた場合でも、異常が生じていない出力信号の組合せに対応した位相補正値φに基づき、補正前回転角度θを補正する。これにより、位相補正値φに基づいて補正前回転角度θを補正するので、センサ素子の実装ずれ等があっても、高精度に被検出部の回転角度δを算出することができる。
(もっと読む)
エンコーダ装置及びエンコーダ装置のための補正方法
【課題】 内挿精度の低下を極力抑えて、検出対象物の回転角度又は移動位置を高精度で検出する。
【解決手段】 センサ部は、検出対象物の回転又は移動に応じて互いに90度だけ位相の異なる正弦波状のA相出力信号及びB相出力信号を出力する。A相出力信号の最大値VAmax及び最小値VAminに対してプラス90度の位置とマイナス90度の位置に対応する4つのサンプリング値VA1〜VA4を取得して、これらの平均値をオフセット値とする。B相出力信号に関しても、同様に、オフセット値を計算する。これらのオフセット値を用いて、A相出力信号及びB相出力信号のサンプリング値をオフセット補正した、検出対象物の回転角度又は移動距離を計算する。
(もっと読む)
磁界角計測装置,回転角計測装置およびそれを用いた回転機,システム,車両および車両駆動装置
【課題】磁気抵抗素子をブリッジ構成で用いた回転角計測装置において、異常が発生すると正しい角度が出力されないので、それを用いた上位システムも機能停止するという課題があった。
【解決手段】ブリッジ60,61をそれぞれ構成するハーフブリッジのうち、正しい方のハーフブリッジの出力信号に基づいた磁界角度(回転角度)を信号151として出力する。
(もっと読む)
回転角センサ
【課題】体格の増大が抑制された回転角センサを提供する。
【解決手段】磁化方向が固定された固定層(15)と、被検出体の生成する外部磁界の向きに応じて磁化方向が変化する自由層(13)との間に、非磁性の中間層(14)が挟まれた磁気抵抗効果素子(10)を有し、該磁気抵抗効果素子(10)の抵抗値変化に基づいて、被検出体の回転角を検出する回転角センサであって、固定層(15)と自由層(13)との対向方向に直交する平面に沿う面積が、固定層(15)よりも自由層(13)の方が大きく、固定層(15)の全てと、自由層(13)の一部とが、中間層(14)を介して対向している。
(もっと読む)
磁気式エンコーダ、サーボモータ及びサーボユニット
【課題】基板上の設計の自由度を向上させることができるできる磁気式エンコーダ、サーボモータ及びサーボユニットを提供すること。
【解決手段】この磁気式エンコーダは、固定された基板120に配置され、磁界を検出する磁界センサ121と、基板120の磁界センサ121と同一面上に該磁界センサ121と離隔して配置され、磁界センサ121にバイアス磁界Hbを印加するバイアス磁石122N,122Sと、磁界センサ121とバイアス磁石122N,122Sとに連結されて基板に配置され、バイアス磁界Hbを磁界センサ121に導くヨーク123N,123Sと、磁界センサ121に対して相対移動して磁界センサ121の近傍を通過し、該磁界センサ121に印加される磁界に影響を与える被検出体111と、を有する。
(もっと読む)
回転磁界センサ
【課題】磁気検出素子の出力信号に含まれる誤差成分の位相が任意になる場合であっても、検出角度の誤差を低減できるようにする。
【解決手段】第1ないし第3の演算部31,32,33を有する角度検出部3には、回転磁界の互いに異なる方向の成分の強度に対応した第1および第2の信号が入力される。第1の演算部31は、第1の信号と第2の信号の2乗和信号を生成する。第2の演算部32は、2乗和信号に基づいて、第1の信号に含まれる第1の誤差成分の推定値である第1の誤差成分推定値と、第2の信号に含まれる第2の誤差成分の推定値である第2の誤差成分推定値とを算出する。第3の演算部33は、第1の信号から第1の誤差成分推定値を減算して第1の補正後信号を生成し、第2の信号から第2の誤差成分推定値を減算して第2の補正後信号を生成し、第1および第2の補正後信号に基づいて角度検出値を算出する。
(もっと読む)
磁気式回転角検出器
【課題】回転ドラムの回転角検出における精度が従来に比べて向上可能な磁気式回転角検出器を提供する。
【解決手段】外周面に交番着磁された磁石3を有する磁気ドラム1に対向して配置され、規定ピッチにて配列した複数の磁気センサ素子12〜15をセンサ面106に配列した磁気センサ10を有する磁気式回転角検出器において、上記規定ピッチは、第1磁石3a及び第2磁石3bの各磁力線が上記センサ面と接する第1接点108及び第2接点111間の距離を元に規定する。
(もっと読む)
回転センサ
【課題】 磁気発生部の相対回転角度の演算時間を短縮することができる回転センサを実現する。
【解決手段】角度演算部60はAMRセンサM1,M2から出力される信号を用い永久磁石2に対する相対回転角度θと演算により求めた演算角度φとの偏差が所定値に収束するようにフィードバック制御を行って相対回転角度θを演算する。初期値決定部53はホール素子H1,H2から出力された各検出信号の各信号レベルと閾値との各比較結果を用い相対回転角度θの初期値θ0が含まれる角度範囲を判定し、その判定した角度範囲の中で発生し得る相対回転角度の初期値と前記演算角度の初期値との差の絶対値が90°未満となるように演算角度の初期値を決定する。初期値決定部は永久磁石2が相対回転を開始する前にのみ演算角度φの初期値φ0を決定し角度演算部60はその決定された演算角度φの初期値φ0を用いてフィードバック制御を開始し、相対回転角度θを演算する。
(もっと読む)
回転センサ
【課題】 回転角度の検出精度を高めながら小型化することができる回転センサを実現する。
【解決手段】 磁気抵抗素子R1〜R8が各磁気抵抗素子の出力信号間に位相差が出るように配置された磁気抵抗素子領域E1と、ホール素子H1,H2が各ホール素子の出力信号間に位相差が出るように配置されたホール素子領域E2とを有し、かつ、磁気抵抗素子領域およびホール素子領域の少なくとも一部同士が重ねられたセンサチップ5と、各ホール素子の各出力レベルと閾値レベルとの比較結果を出す比較部53と、各磁気抵抗素子の各出力信号を用いて相対回転角度θに対応する演算角度φを演算する角度演算部60と、その演算された角度と閾値角度とを比較し、その比較結果と比較部53の比較結果とを用い、相対回転角度に対応する信号を出力する出力部70とを備える。
(もっと読む)
回転角検出装置およびこれを備えたパワーステアリング装置
【課題】シャフトが径方向にずれた場合に検出誤差を抑制することのできる回転角検出装置およびこれを備えたパワーステアリング装置を提供する。
【解決手段】インプットシャフト41に一体に設けられ、インプットシャフト41の周方向に所定の間隔をもってN極およびS極が着磁された磁性部材44と、磁性部材44に対向配置されてN極およびS極による磁界の変化を検出するMRセンサ45とを備えた回転角センサ50において、MRセンサ45をインプットシャフト41の周方向に異なる位置に複数配置する。
(もっと読む)
磁気センサ
【課題】外部磁界の方向が基準方向に対してなす角度を検出する磁気センサにおける検出角度の誤差を低減する。
【解決手段】磁気センサ1は、第1の位置における外部磁界の方向が第1の方向に対してなす第1の角度の検出値である第1の検出角度を算出する第1の検出部10と、第2の位置における外部磁界の方向が第2の方向に対してなす第2の角度の検出値である第2の検出角度を算出する第2の検出部20を備えている。第1の検出角度は第1の角度誤差を含み、第2の検出角度は第2の角度誤差を含んでいる。第1の検出角度の位相と第2の検出角度の位相は、誤差周期の1/2の奇数倍だけ異なる。
(もっと読む)
回転検出装置
【課題】 検出精度を良好な状態に維持したまま、回転体に設けられる回転磁石を回転体の外周面または内周面に配置した回転軸貫通構造に適した回転検出装置を提供すること。
【解決手段】 回転軸11に取り付けた円形回転磁石12と、磁気センサ13A等で回転検出装置10を構成した。磁気センサ13A等を、バイアス磁石14と、バイアス磁石14の磁極面に配置される基板15と、基板15の中心点Oで直交して延びる2つの軸に沿い中心点Oからそれぞれ同一距離の位置に設定された4つの領域15a等に、中心点Oを中心として点対称に配置された磁気抵抗効果素子a等で構成した。そして、磁気センサ13A等の一方の軸が円形回転磁石12の外周面で形成される円の接線と平行し、他方の軸の傾斜角度が互いに同じになるようにして、磁気センサ13A等を円形回転磁石12の外周側で周方向に90度離れた位置に設置した。
(もっと読む)
位置検出装置
【課題】2重系の位置検出系統を1つの被検出体で実現し、かつ、小型化することができる位置検出装置を提供する。
【解決手段】位置検出装置1は、シフトレバー3の操作に応じて第1〜第3の移動線y1、y2、xに沿って移動するマグネット20と、第1の移動線y1に対しd1だけ離間する第1のMR回路11と、第1及び第2の移動線y1、y2の中間位置に配置される第2のMR回路12と、第2の移動線y2に対し第1の移動線y1とは反対側にd1だけ離間する第3のMR回路13と、位置判定部40とを備える。この位置判定部40は、第1及び第2のMR回路11、12の出力に基づいて第1の移動線y1上のマグネット20の位置を判定し、第2及び第3のMR回路12、13の出力に基づいて第2の移動線y2上のマグネット20の位置を判定する。これにより、1つのマグネットで2重系の位置検出を実現する。
(もっと読む)
位置検出装置
【課題】2重系の位置検出系統を1つの被検出体で実現し、かつ、小型化することができる位置検出装置を提供する。
【解決手段】位置検出装置1は、シフトレバー3の操作に応じて第1〜第3の移動線y1、y2、xに沿って移動するマグネット20と、第1の移動線y1に対しd1だけ離間する第1のMR回路11と、第1の移動線y1の直下に配置される第2のMR回路12と、第2の移動線y2の直下に配置される第3のMR回路13と、第2の移動線y2に対し第2のMR回路12とは反対側でd1だけ離間する第4のMR回路14と、位置判定部40とを備える。この位置判定部40は、第1及び第3のMR回路11、13の出力に基づいて第1の移動線y1上のマグネット20の位置を判定し、第2及び第4のMR回路12、14の出力に基づいて第2の移動線y2上のマグネット20の位置を判定する。これにより、1つのマグネットで2重系の位置検出を実現する。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】故障などにより異常となった出力信号を特定可能な回転角検出装置を提供する。
【解決手段】ブリッジ回路11、12は、被検出部87の回転に応じて変化する回転磁界によりインピーダンスが変化するセンサ素子21〜28により構成されるハーフブリッジ14〜17を有する。信号取得手段は、ハーフブリッジ14〜17の中点31〜34から出力される出力信号をハーフブリッジ14〜17ごとに取得する。回転角算出手段は、信号取得手段により取得された出力信号に基づき、被検出の回転角度θを算出する。異常特定手段は、信号取得手段によって取得される少なくとも4つの出力信号に基づく値である演算値が所定の範囲から外れた場合、当該演算値に対応する出力信号を異常出力信号として特定する。これにより、故障などによりどの出力信号が異常となったかを特定することができる。
(もっと読む)
磁気センサ
【課題】磁束発生源との間の間隔が広くても磁気検知することができる、磁気抵抗効果素子を用いた磁気センサを提供すること。
【解決手段】本発明の磁気センサは、第1の方向に感度軸を持つミアンダ形状を有し、外部磁界に対して磁化変動する一対のフリー磁性層で非磁性層を挟持してなる積層構造を有する第1磁気抵抗効果素子、及び平面視において前記第1磁気抵抗効果素子を挟持するように配置された一対の軟磁性膜で構成された第1磁気検知素子と、前記第1の方向と異なる第2の方向に感度軸を持つミアンダ形状を有し、外部磁界に対して磁化変動する一対のフリー磁性層で非磁性層を挟持してなる積層構造を有する第2磁気抵抗効果素子、及び平面視において前記第2磁気抵抗効果素子を挟持するように配置された一対の軟磁性膜で構成された第2磁気検知素子と、が同一基板上に設けられていることを特徴とする。
(もっと読む)
磁気センサ
【課題】磁束発生源との間の間隔が広くても磁気検知することができる、磁気抵抗効果素子を用いた磁気センサを提供すること。
【解決手段】本発明の磁気センサは、第1の方向に感度軸を持つミアンダ形状を有し、外部磁界に対して磁化変動する一対のフリー磁性層で非磁性層を挟持してなる積層構造を有する第1磁気抵抗効果素子、及び平面視において前記第1磁気抵抗効果素子を挟持するように配置された一対の軟磁性膜で構成された第1磁気検知素子と、前記第1の方向と異なる第2の方向に感度軸を持つミアンダ形状を有し、外部磁界に対して磁化変動する一対のフリー磁性層で非磁性層を挟持してなる積層構造を有する第2磁気抵抗効果素子、及び平面視において前記第2磁気抵抗効果素子を挟持するように配置された一対の軟磁性膜で構成された第2磁気検知素子と、が同一基板上に設けられていることを特徴とする。
(もっと読む)
回転角センサ、モータ、回転角検出装置、及び電動パワーステアリング装置
【課題】簡素な構成にて高精度の回転角検出が可能であるとともに磁極数の変更に対しても高い柔軟性を有する磁気式の回転角センサを提供すること。
【解決手段】回転角センサは、周方向に沿って複数の磁極が形成されたマグネットロータと、そのマグネットロータの同心円上に均等角度間隔で配置された3つのセンサデバイス33とを備える。また、各センサデバイス33は、スピン固定層の磁化方向が逆向きとなるように直列接続された一対のスピンバルブ型磁気抵抗素子37a,37bを有する3つのハーフブリッジ回路38(38u,38v,38w)を備える。そして、各センサデバイス33は、そのマグネットロータの回転に伴う磁束変化に基づき各ハーフブリッジ回路38が出力するセンサ信号Vu,Vv,Vwが、互いに電気角で120°の位相差を有するように構成される。
(もっと読む)
回転数センサ
【課題】本発明は、回転数を検出することができるとともに、回転方向も検出することができる回転数センサを提供することを目的とするものである。
【解決手段】本発明の回転数センサは、差動増幅回路29からの出力信号を所定の電圧と比較して矩形波信号を出力するコンパレータ30の後段に、このコンパレータ30からの出力信号の立ち上がりおよび立ち下がりを検出して比較する立ち上がり検出手段32、立ち下がり検出手段34およびコンパレータ36等からなる比較手段を設けたものである。
(もっと読む)
1 - 20 / 62
[ Back to top ]