
Fターム[2F077TT16]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | インピーダンス電気信号変換 (720) | ブリッジ回路を用いるもの (317) | 4素子型 (221)
Fターム[2F077TT16]に分類される特許
1 - 20 / 221
エンコーダ搭載機器およびエンコーダ装置
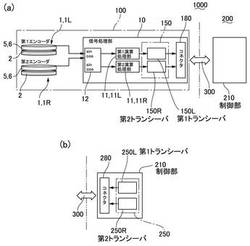
【課題】簡素な回路構成で、複数のエンコーダの検出結果を伝送することのできるエンコーダ搭載機器、およびエンコーダ装置を提供すること。
【解決手段】エンコーダ装置100およびエンコーダ搭載機器1000では、エンコーダ装置100側および制御部210側に同期式の半2重シリアル通信用のインターフェース機器150、250を設け、制御部210は、複数の演算処理部11での演算結果が各々送信されるタイミングを規定する指令信号を異なるタイミングで送信する一方、エンコーダ装置100は、指令信号に対応するタイミングで複数の演算処理部11での演算結果、および複数の演算処理部11での演算結果が出力されるタイミングに対応する同期信号CLKの各々をシリアル信号として出力する。
(もっと読む)
磁界角計測装置およびそれを用いた回転機

【課題】磁束発生体が高速に回転する場合であっても、磁束発生体または磁気センサの近傍に非磁性の導体(導電体)を配置した構成を用いて精度良く磁界角または回転角を計測すること。
【解決手段】磁界方向に感応する磁気センサ70と、非磁性の第1の導体240と、非磁性の第2の導体242とを備えた磁界角計測装置であって、前記磁気センサは、前記第1の導体と前記第2の導体との間に配置され、前記第1の導体中の渦電流が前記磁気センサに及ぼす磁界と、前記第2の導体中の渦電流が前記磁気センサに及ぼす磁界とが、互いに打ち消しあう構成とする。
(もっと読む)
スロットルバルブ用回転角度検出装置
【課題】径時的に信頼性が低下することを抑制することができると共に、検出開始時の実際の回転角度と演算した回転角度との誤差を小さくすることができるスロットルバルブ用回転角度検出装置を提供する。
【解決手段】第1信号および第2信号を用いて磁気発生部20の回転角度を演算し、磁気発生部20の実際の回転角度θと演算により求めた回転角度φとの偏差が所定値に収束するようにフィードバック制御を行う角度演算部60と、角度演算部60が演算した回転角度φに対応する信号を出力する出力部70と、を備える。そして、角度演算部60は、検出開始時の演算した回転角度φとしてスロットルバルブ10が全閉状態であるときの角度を用いるものとする。
(もっと読む)
回転検出装置
【課題】回転状態の検出感度の低下が抑制された回転検出装置を提供する。
【解決手段】複数の磁電変換素子(13,14)を有するセンサチップ(10)と、中空内にセンサチップ(10)が設けられた筒状磁石(30)と、を有し、被検出体の回転による筒状磁石(30)の形成する磁界の変化を磁電変換素子(13,14)によって検出することで、被検出体の回転状態を検出する回転検出装置であって、センサチップ(10)は、磁電変換素子(13)の形成された半導体基板(11)と、磁電変換素子(14)の形成された半導体基板(12)と、を有し、2つの半導体基板(11,12)が接合部材(15)を介して接合されている。
(もっと読む)
回転角計測装置,制御装置およびそれらを用いた回転機システム
【課題】磁束発生体が高速に回転する場合であっても、磁束発生体または磁気センサの近傍に非磁性の導体(導電体)を配置した構成を用いて精度良く磁界角または回転角を計測すること。
【解決手段】磁界方向に感応する磁気センサ70と、前記磁気センサからの出力が入力される検出部302と、を備えた回転角計測装置であって、前記回転角計測装置は、磁束発生体202を備えた回転体121とともに用いられるものであり、前記磁気センサの出力は、前記磁界方向に対応した原角度信号セット155であり、前記検出部は、前記回転体の回転速度を引数とする補正関数が出力する補正値を用いて前記磁気センサの近傍に配置された非磁性の導体の影響を補正した補正角度を出力する。
(もっと読む)
位置検出装置
【課題】本発明は、広い区間において位置検出が可能で、さらに簡単な構成でありながら、広い温度範囲で物体の位置を正確に検出できる位置検出装置を提供することを目的とする。
【解決手段】本発明の位置検出装置は、第1、第2の磁気検出素子を有する磁気検出部21と、磁石51とを備え、前記第1の磁気検出素子の出力と前記第2の磁気検出素子の出力との比から、磁束密度がX軸となす角度θを求めることによって、前記磁石のX軸方向の相対的な移動距離を検出したものである。
(もっと読む)
相対角度検出装置および電動パワーステアリング装置
【課題】ハウジング外において電線に力が作用したとしても、ハウジング内の電線の端部に大きな力が及ばないようにする技術を提供する。
【解決手段】内外を連通する連通孔が形成されたハウジング内に収納され、互いに同軸的に配置された2つの回転軸の相対回転角度に応じた電気信号を出力する相対角度センサと、相対角度センサから出力される電気信号をハウジング外に配置されるECUに伝送する電線と、ハウジングの連通孔に嵌合されて電線を保持するグロメット320と、ハウジングの外側に配置され、互いに結合されることで電線を屈曲させた状態で把持するキャップ400と、を備える。
(もっと読む)
磁気センサ及び回転角度検出装置
【課題】 検出感度の異方性を抑えるため、磁気的等方性を有し且つ小型である磁気センサを提供する。
【解決手段】 本発明の磁気センサは、非磁性の中間層を介して2つの強磁性膜が積層されたスピンバルブ型の磁気抵抗効果素子を用いた磁気センサにおいて、前記磁気抵抗効果素子の形状は複数のリングが連なった形状であり、各々のリングが電気的に接続されている状態で通電され、前記磁気抵抗効果素子の電気抵抗が外部磁場に対して変化することを特徴とする。前記検出素子が少なくとも2つ含まれるブリッジ回路で回転角度検出装置を構成する。
(もっと読む)
回転角度計測装置
【課題】回路コストを低減するため差動増幅回路やアナログ・デジタル変換回路が必要のない回路構成を有する回転角度計測装置を提供する。
【解決手段】回転軸と同期して回転する磁界発生手段が発生する磁界方向を少なくとも2以上の位相の異なる電気信号として出力するセンサ素子部211,212,221,222,231,232,241,242を有する回転角度センサ2と、センサ素子部を駆動させる周期波形を回転角度センサに出力する信号発生回路35と、センサ素子部から得られた出力が入力されるコンパレータ31,32,33,34と、コンパレータからの出力が入力される演算回路40と、を有し、演算回路は、コンパレータから出力されるパルス波形をデジタル値として取り込むパルス入力端子を有し、パルス入力端子で取り込まれた値に基づき回転軸の回転角度と等価である磁界方向を演算し出力する構成とした。
(もっと読む)
エンコーダ、駆動装置及びロボット装置
【課題】小型化が可能なエンコーダ、駆動装置及びロボット装置を提供すること。
【解決手段】光学パターンが形成された第一部材、及び、当該第一部材の側面の側に配置され磁気パターンが形成された第二部材、を有する移動部と、光学パターンを介した光を検出する光検出部と磁気パターンによる磁場を検出する磁場検出部とがチップ基板に実装されている位置情報検出部とを備える。
(もっと読む)
エンコーダ、駆動装置及びロボット装置
【課題】小型化が可能なエンコーダ、駆動装置及びロボット装置を提供すること。
【解決手段】光学パターンが形成された第一部材、及び、第一部材のうち光の入射面側に配置され磁気パターンが形成された第二部材、を有する移動部と、光学パターンを介した光を検出する光検出部と磁気パターンによる磁場を検出する磁場検出部とがチップ基板に実装されている位置情報検出部とを備える。
(もっと読む)
位置情報検出センサ、位置情報検出センサの製造方法、エンコーダ、モータ装置及びロボット装置
【課題】小型化が可能な位置情報検出センサ、位置情報検出センサの製造方法、エンコーダ、モータ装置及びロボット装置を提供する。
【解決手段】光学パターンを介した光を検出する光検出部20と、磁気パターンによる磁場を検出する磁性薄膜をそれぞれ有す第1検出部31と第2検出部32からなる磁場検出部30とを備え、光検出部20と磁場検出部30とは、同一のチップ基板10に第1検出部31と第2検出部32が光検出部20を挟む位置に配置されている。
(もっと読む)
エンコーダ、駆動装置及びロボット装置
【課題】小型化が可能なエンコーダ、駆動装置及びロボット装置を提供すること。
【解決手段】光学パターンが形成された第一部材、及び当該第一部材のうち光の入射面に対して反対の面側に配置され磁気パターンが形成された第二部材、を有する移動部と、光学パターンを介した光を検出する光検出部と磁気パターンによる磁場を検出する磁場検出部とがチップ基板に実装されている位置情報検出部とを備える。
(もっと読む)
エンコーダ、駆動装置及びロボット装置
【課題】小型化が可能なエンコーダ、モータ装置及びロボット装置を提供すること。
【解決手段】磁気パターンを有する単一部材として形成され、光学パターンを有する移動部と、光学パターンを介した光を検出する光検出部と磁気パターンによる磁場を検出する磁場検出部とがチップ基板に実装されている位置情報検出部とを備える。
(もっと読む)
位置情報検出センサ、位置情報検出センサの製造方法、エンコーダ、モータ装置及びロボット装置
【課題】小型化が可能な位置情報検出センサ、位置情報検出センサの製造方法、エンコーダ、モータ装置及びロボット装置を提供すること。
【解決手段】光学パターンを介した光を検出する光検出部が実装された第一チップと、当該第一チップとの間で互いに表面を対向させた状態で接合され、磁気パターンによる磁場を検出する磁場検出部が実装された第二チップとを備える。
(もっと読む)
アブソリュートエンコーダ装置及びモータ
【課題】組み付けが容易であり高分解能を達成する小型のアブソリュートエンコーダ装置を提供することを目的とする。
【解決手段】本発明は、第1の磁気パターン14(2極)と第2の磁気パターン16(多極)とを有する永久磁石4と、第1の磁気パターン14の磁界を検出する第1の磁気センサ5と、第2の磁気パターン16の磁界を検出する第2の磁気センサ6と、第1及び第2の磁気センサ5,6の出力信号から、回転軸2の絶対的な回転角度を算出する信号処理回路7とを備えるエンコーダ装置1であり、第1及び第2の磁気センサ5,6と信号処理回路7は単一基板8に固定され、第1の磁気パターン14は永久磁石4の内側において軸方向と交わる方向に延びる面上に形成され、第2の磁気パターン16は永久磁石4の外周面に形成される。
(もっと読む)
回転角度検出器
【課題】磁界発生手段の大型化を伴うことなく、検出出力を大きくとる。磁気センサや磁界発生手段の搭載精度を緩和する。
【解決手段】磁気センサ1の感磁パターンPT2を、磁石3−1,3−2が発生する磁界Bの平行磁場が得られる最大幅W1を直径とする円4に内接するように、基板2上に形成する。具体的には、感磁パターンPT2を、4つの磁気抵抗素子1−1〜1−4の各々がつづら折りでほぼ扇形になるように形成された線状電極とする。各磁気抵抗素子1−1〜1−4は、その扇形の中心線が互いに隣接する磁気抵抗素子と90度の回転ずれを有するものとし、かつ各磁気抵抗素子1−1〜1−4の扇形の円弧を円4に内接する1/4円弧とする。
(もっと読む)
磁気センサ
【課題】製作時に発生する残留応力や温度変化時に発生する応力などの影響を排除し、回転角度などの検出精度を高める。
【解決手段】上蓋3と下蓋4と枠体2とでハウジング構造を形成する。このハウジング構造の内部の空間(枠体2内の上蓋3と下蓋4との対向空間6)に、柱体5をその上面5aの中心部5a1および下面5bの中心部5b1を上蓋3および下蓋4に接合した状態で支持固定する。柱体5は、上蓋3および下蓋4に間隙部G1およびG2を介して対向する第1の板面5a2および第2の板面5b2を有しており、この柱体5の例えば第1の板面5a2に、磁気抵抗素子1−1〜1−4をセンサ素子とする磁気センサ回路7を形成する。
(もっと読む)
回転センサ
【課題】構造誤差等に起因する測定誤差の発生を抑制して相対回転角度をより正確に演算し得る回転センサを提供する。
【解決手段】相対回転角度θが基準角度となるように相対回転させた回転子4について、正弦波相コイル3bからの正弦波信号に基づいて、基準角度からのずれが角度αとして予め測定され、余弦波相コイル3cからの余弦波信号に基づいて、基準角度からのずれが角度βとして予め測定される。そして、角度演算部60により、正弦波相コイル3bから出力される正弦波信号sin(θ+α)にcos(φ+β)を乗算したものから、余弦波相コイル3cから出力される余弦波信号cos(θ+β)にsin(φ+α)を乗算したものを減算して求められる(sinαsinβ+cosαcosβ)×sin(θ−φ)について、その変数部分である(θ−φ)が、上記所定値になるようにフィードバック制御を行って、相対回転角度θが演算される。
(もっと読む)
3相ブラシレスモータ
【課題】部品点数の増加を抑え、小型軽量化可能な、エンコーダを備えた3相ブラシレスモータを提供することである。
【解決手段】本発明は、電機子コアおよび電機子コイルを有するステータと前記ステータの内径側に空隙を介して設けた永久磁石を有するロータとからなるモータと、前記ロータの回転位置を検出するエンコーダと、を備えた3相ブラシレスモータにおいて、前記ロータの永久磁石は回転軸と直角方向に着磁された複数の磁極をもつ磁石であり、前記ロータの磁界を検出する複数の磁気センサを有し、前記複数の磁気センサのうちの少なくとも2つを並列配置して該2つの磁気センサの出力を合成し、前記エンコーダは前記磁気センサによる合成した出力に基づいて前記ロータの回転位置を検出することを特徴とする。
(もっと読む)
1 - 20 / 221
[ Back to top ]