
Fターム[2F077TT76]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | カウンタを用いる信号処理 (278) | パルス幅検出に用いるもの (13)
Fターム[2F077TT76]に分類される特許
1 - 13 / 13
位置検出構造
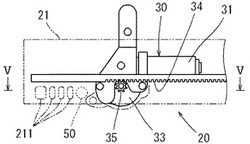
【課題】基体48に対して相対移動する移動物体20における互いに離れた2位置への移動を検出する位置検出構造において、互いに離れた2位置への移動物体の移動を単一のセンサで、誤検出なく区別して検出する。
【解決手段】基体(ホルダ)48と移動物体(プラットホーム)20との対向部位の一方で、前記2位置のうちの一つの位置に検出センサ50を設け、該検出センサは、各位置において互いに異なった電気信号を発生する。一つの検出センサが2位置でそれぞれ異なった信号を発生するので、一つのセンサで2位置への移動物体の移動を区別して検出することができる。
(もっと読む)
磁気検出装置

【課題】磁電変換素子の検出信号のシフト量によらず正確な磁性移動体の位置を検出することが可能な磁気検出装置を得る。
【解決手段】磁電変換素子からの検出信号の振幅をDC結合にて波形整形する第1の比較回路31と、磁電変換素子からの検出信号の振幅をAC結合にて波形整形する第3の比較回路33と、固有周波数を有する発振回路51と、第1の比較回路の出力を、発振器を用いてカウントする制御回路52と、第1の比較手段と第2の比較手段の出力を選択する選択回路53を備え、制御回路52は第1の比較回路31の出力矩形波の立上りから次の立上りまでもしくは立下りから次の立下りまでをカウントし、所望の値になった時点で選択回路53に出力を与え、選択回路は第1の比較回路もしくは第3の比較回路の出力矩形波を選択し、出力する磁気検出装置。
(もっと読む)
変位量検出装置
【課題】 環境因子の影響を受けずに検出対象物の変位量を検出することができる変位量検出装置を提供する。
【解決手段】 発振回路2は、検出対象物4との相対距離の変化に応じてインダクタンスが変化するコイル5を備え、前記コイル5のインダクタンスに依存する周波数の信号を出力する。信号処理部3は、各コイル5と検出対象物4との相対距離をそれぞれ独立変数として、各発振回路2の発振周波数を予め定める次数の多項式でそれぞれ近似し、この近似した複数の多項式を用いて前記多項式の係数を消去することによって求められる各発振回路2の発振周波数と検出対象物4の変位量yとの関係に基づいて、検出対象物4の変位量yに相当する電気信号を出力する。
(もっと読む)
回転角度検出装置および回転角度検出方法
【課題】回転体の回転角度をより精度高く検出することができる技術を提供する。
【解決手段】回転体の回転に連動して回転する第1の従動体および第2の従動体と、第1の従動体および第2の従動体それぞれの回転角度を検出する第1および第2の回転角度センサと、第1および第2の回転角度センサにより入力された検出結果に基づいて回転体の回転角度を演算する回転角度演算部とを備え、回転角度演算部は、第1および第2の回転角度センサが第1あるいは第2の従動体の回転角度を検出した時点の回転角度である検出回転角度を第1および第2の回転角度センサの検出結果に基づいて演算し(S506)、第1および第2の回転角度センサが検出した時点からその検出結果の入力時点までの回転体の回転角度の変化量を推測し(S508)、検出回転角度と変化量とに基づいて回転体の回転角度を演算する(S509)。
(もっと読む)
回転角度検出装置および回転角度検出方法
【課題】回転体の回転角度をより精度高く検出することができる技術を提供する。
【解決手段】回転体の回転角度を演算するECUは、第1の回転角度センサの検出タイミングと第2の回転角度センサの検出タイミングとの位相差ΔTを認識し、第1の回転角度センサおよび第2の回転角度センサが第1の従動ギアあるいは第2の従動ギアの回転角度を検出した時点の回転角度である検出回転角度θAおよびθBを第1の回転角度センサおよび第2の回転角度センサの検出結果に基づいて算出し(S501)、位相差ΔTに基づいて、算出した第1の従動ギアおよび第2の従動ギアのいずれか一方の従動ギアの回転角度を補正し(S504)、補正した一方の従動ギアの回転角度とS501にて算出した他方の従動ギアの検出回転角度とに基づいて回転体の回転角度φを算出する(S508)。
(もっと読む)
回転角度検出装置
【課題】回転体の回転角度を演算する演算部において、検出結果をより確実に用いることができるように出力することができる技術を提供する。
【解決手段】回転体に取り付けられたギアにより回転力が付与されて回転する第1の従動ギアおよび第2の従動ギアそれぞれの回転角度を検出する第1の回転角度センサおよび第2の回転角度センサと、第1の回転角度センサおよび第2の回転角度センサにより入力された検出結果に基づいて回転体の回転角度を演算するECUとを備え、第1の回転角度センサおよび第2の回転角度センサの少なくともいずれかは、検出した回転角度に応じたデューティ比を有するパルス幅変調信号を、立ち上がりエッジおよび立ち下がりエッジのいずれか一方のエッジが予め定められた周期となるように出力するとともに、検出した回転角度に応じた時間に予め定められた時間TPを加算した時間を一方のエッジから他方のエッジまでの時間とする。
(もっと読む)
回転数検出装置
【課題】回転体の回転数を検出する回転数検出装置において、回転体の回転角度に応じた回転パルス信号を通過させるフィルタ回路の異常の有無を判別することができる構成を提供する。
【解決手段】回転パルス信号(接続点26の電圧V1)をカウントするカウンタ23を用いて回転パルス信号としきい値Vthとを比較する。これにより、回転パルス信号がしきい値Vthを超える第1の時間V1_Hと超えない第2の時間V1_Lとを取得する。また、判別部24を用いて、第1の時間V1_Hおよび第2の時間V1_Lとの比率が一定範囲内であるか否かを判定する。これにより、第1のフィルタ回路15および第2のフィルタ回路22のうちのいずれか一方または両方の異常の有無を判別する。
(もっと読む)
回転体検知装置及び画像形成装置
【課題】 感光ドラム等の回転体の回転状態を検知する回転検知装置に異常が発生した場合、その異常原因を特定すること。
【解決手段】 回転検知装置に異常が発生した場合、感光ドラム11を回転させた状態で第1のエンコーダセンサ112及び第2のエンコーダセンサ113から出力される信号に基づき、エンコーダホイール111、第1のエンコーダセンサ112、及び第2のエンコーダセンサ113のいずれに異常が発生したのかを特定する。
(もっと読む)
位置検出装置
【課題】 従来より低コストで高精度に位置検出を行うことができる位置検出装置を提供する。
【解決手段】 位置検出装置は、遮光板63と、遮光板63を検出するフォトインタラプタ62とを有し、所定範囲を往復移動させられる鏡筒ホルダとともに遮光板63を移動させることによって鏡筒ホルダの位置を検出し、遮光板63には、フォトインタラプタ62により識別可能な複数の透過部63a、63c、63e、遮光部63b、63d、63fが鏡筒ホルダの移動方向に異なる大きさで形成され、透過部63a、63c、63e、遮光部63b、63d、63fの大きさをフォトインタラプタ62で検出することによって鏡筒ホルダの位置を検出することを特徴とする。
(もっと読む)
ロータリエンコーダを用いた制御システムおよび自己診断機能付きロータリエンコーダ
【課題】ロータリエンコーダを組み込んだ制御システムでのさらなる安全性向上を図ること。
【解決手段】被検出軸の回転に伴い、電気角で180度ごとに反転するA相信号と、A相信号より電気角で90度ずれ180度ごとに反転するB相信号と、を出力するロータリエンコーダ2と、このロータリエンコーダ2から上記両信号を入力すると共に上記両信号に基づいて上記被検出軸の回転動作を電子制御する電子制御装置38と、を備えた制御システムにおいて、ロータリエンコーダ2に当該ロータリエンコーダ2自体を自己診断する機能と、その自己診断結果に従い制御システムのフェイルセーフ信号を出力する機能とを備えた構成。
(もっと読む)
短絡検出回路、RDコンバータ及びデジタル角度検出装置
【課題】単純な回路構成によって、レゾルバに接続された信号線路毎及び/又は天絡・地絡毎に個別に短絡を検出し、かつ、ロータが不規則に回転している状態やロータが停止している状態でも短絡を検出することを可能にする。
【解決手段】プッシュプル方式で励磁信号が供給される励磁コイルの両端の電位を比較し、その比較結果を示す矩形波信号である励磁パルス信号のデューティに基づき、励磁信号の信号線路の地絡及び天絡の少なくとも一方を検出し、その検出結果を示す励磁ライン異常検出信号を出力する励磁ライン異常検出回路と、検波前の2相の検出信号の少なくとも一方の電位と所定の基準電位とを比較し、その比較結果を示す矩形波信号である検出パルス信号のデューティに基づき、検出信号の信号線路の地絡及び天絡の少なくとも一方を検出し、その検出結果を示す検出ライン異常検出信号を出力する検出ライン異常検出回路と、のうち、少なくとも一方を備える。
(もっと読む)
直交エンコーダを調整し、デコーダ処理速度を確立するシステム及び方法
【課題】 所望の安全係数に加えて、エンコーダ性能論理状態幅誤差の測定値を利用して、論理デコーダに対する最低要求処理速度を判定するように配列されているシステムを提供する。
【解決手段】 本発明の論理エンコーダ性能を解析するシステムは、エンコーダのチャネルの論理信号の立ち上がりエッジ及び立ち下がりエッジを獲得するサンプラと、立ち上がりエッジと立ち下がりエッジを利用して2つ又はそれより多い論理状態幅を判定し、幅の1つと幅の少なくとも他の1つ間の不同を判定する論理とを含むことを特徴とする。
(もっと読む)
エンコーダカウンタ
【課題】各相の信号にパルス抜け等が生じて本来の物理状態量が正しく伝送されないような場合でもこれを修正して正しい計測のもとで安定した制御を継続できるエンコーダカウンタを提供する。
【解決手段】アップダウンカウンタ3と、ラッチ回路4を備えたエンコーダカウンタ1において、更に、A相ディジタルフィルタ21とB相ディジタルフィルタ22を備え、A相信号11はA相ディジタルフィルタに入力しノイズを取り除いてアップダウンカウンタへ出力し、B相信号12はB相ディジタルフィルタに入力しノイズを取り除いてアップダウンカウンタへ出力し、アップダウンカウンタは各相ディジタルフィルタの出力信号に基づいて、パルス数を計数するものである。
(もっと読む)
1 - 13 / 13
[ Back to top ]