
Fターム[2F103ED16]の内容
Fターム[2F103ED16]に分類される特許
1 - 9 / 9
エンコーダ及びエンコーダのパターン検出方法
【課題】符号板の回転数が高くなった場合でも適切に誤動作を検出することができるエンコーダ及びエンコーダのパターン検出方法を提供すること。
【解決手段】パターンを有し、回転軸を中心として回転する回転部と、パターンを検出する第一パターン検出部と、当該第一パターン検出部とは別にパターンを検出する第二パターン検出部と、第一パターン検出部又は第二パターン検出部における検出異常の有無を検出する制御部とを備える。
(もっと読む)
エンコーダ装置、及び装置

【課題】スケールの位置情報を高精度に検出する。
【解決手段】エンコーダ装置は、照射光を射出する光源部と、少なくとも移動方向に光源部と相対的に移動可能であって、照射光が入射され、移動方向に沿って形成されたパターンを有するスケールと、照射光を変調させる変調信号と、変調信号に応じた参照信号とを生成する変調部と、照射光を受光して、受光した照射光に応じた受光信号を出力する受光部と、参照信号を遅延させて遅延参照信号を生成する遅延信号生成部と、遅延信号生成部によって生成された遅延参照信号と受光信号とに基づいて、移動方向におけるスケールの位置情報を検出する位置検出部と、を備える。
(もっと読む)
2次元アブソリュートエンコーダ及びそのスケール
【課題】2次元アブソリュートエンコーダの高分解能化に有利な技術を提供する。
【解決手段】互いに直交する第1方向および第2方向に沿って所定のピッチでマークが2次元配列されたスケールと、第1方向に配列された第1個数のマークを検出し、第2方向に配列された第2個数のマークを検出する検出器と、第1及び第2方向におけるスケールの絶対位置を、検出器の出力に基づいて、それぞれ決定する処理部とを備える。各マークは、第1方向における位置を示すための量子化された第1符号の情報と第2方向における位置を示すための量子化された第2符号の情報とを有する。処理部は、第1個数のマークの検出結果から第1符号列を生成し、第1符号列から第1方向におけるスケールの絶対位置を求め、第2個数のマークの検出結果から第2符号列を生成し、第2符号列から第2方向におけるスケールの絶対位置を求める。
(もっと読む)
エンコーダ、及びアクチュエータ
【課題】エンコーダの低コスト化を図りつつ、エンコーダの信頼性を向上する。
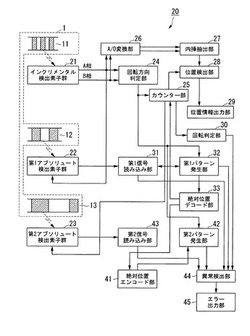
【解決手段】エンコーダ27は、起動時等にスライダが停止した状態で、独立して点灯される複数の光源を用いて複数の絶対位置を検出し、この複数の絶対位置の差が所定範囲内に収まっているかどうかに基づいてエラーの判定を行うことで、高い信頼性を確保する。これとともに、エンコーダ27は、起動後は、インクリメンタルスケール51を用いインクリメンタルエンコーダとして用いられることで、低コスト、及びコンパクトな構成とすることができる。
(もっと読む)
エンコーダ用スケールとエンコーダ用スケール製造方法とアクチュエータ
【課題】 コストの上昇を来すことなく信頼性を高めることが可能なエンコーダ用スケールを提供すると共にそのようなエンコーダ用スケールを製造するエンコーダ用スケール製造方法とそのようなエンコーダ用スケールを使用したアクチュエータを提供することにある。
【解決手段】 高反射率部及び低反射率部を備えてなるエンコーダ用スケールにおいて、上記高反射率部及び低反射率部は印刷により形成されたものであることを特徴とするものであり、それによって、信頼性の高いエンコーダ用スケールを低コストで提供することができる。
(もっと読む)
信号処理装置及び計測装置
【課題】
安価で信頼性の高い信号処理装置を提供する。
【解決手段】
本発明の信号処理装置は、被計測物の位置を計測する計測装置に用いられる信号処理装置1であって、被計測物の位置に応じた信号の位相を時間に対して回帰することにより、被計測物の速度を算出する回帰演算器19と、第1のサンプリング時における被計測物の位置に回帰演算器19で算出された速度を加算することにより、第2のサンプリング時における被計測物の予測位置を求める予測演算手段(加算器22)と、位相演算手段で求められた第2のサンプリング時の計測位相から予測位置を減算して予測誤差を求める誤差演算手段(減算器23)と、桁拡張した予測誤差を予測位置に加算することにより、第2のサンプリング時における被計測物の位置を求める位置演算手段(加算器21)とを有する。
(もっと読む)
絶対位置の計測装置
【課題】
簡易な構成で信頼性の高い絶対位置の計測装置を提供する。
【解決手段】
絶対位置の計測装置は、被測定物の位置に応じて位相が変化する複数の第一の信号を出力する第一の出力手段と、被測定物の位置に応じて位相が変化し、第一の信号より干渉性の低い複数の第二の信号を出力する第二の出力手段と、第一の信号の位相を算出する位相演算器と、第二の信号の振幅値を算出する振幅演算器と、第一の信号の周期毎に、振幅演算器により算出された第二の信号の振幅値の平均値を算出する平均値演算手段と、平均値演算手段により算出された平均値を用いて二次回帰演算を行う回帰演算手段と、二次回帰演算により求められた第二の信号のピーク位置から被測定物の原点位置を求めるピーク位置演算手段と、ピーク位置演算手段で求めた原点位置から被測定物の絶対位置を算出する絶対位置算出手段とを有する。
(もっと読む)
アブソリュートエンコーダ
アブソリュートエンコーダ1の回転軸2に取り付けられた回転板3に、所定の位置関係で第1の開口31、第2の開口32を形成し、回転板3の下面3aに対向するように2次元のプロファイルセンサ5を設置する。また、回転板3の開口31、32を挟んでプロファイルセンサ5の光感応領域と対向するように、光源41、42からなる光供給部4を設置する。そして、光源41、42から供給された測定光が回転板3の開口31、32を通過してプロファイルセンサ5で検出された第1検出位置P1、第2検出位置P2の相関によって、回転軸2の回転角の絶対値を算出する。これにより、回転軸の回転角の絶対値を簡単な構成で精度良く測定できるアブソリュートエンコーダが得られる。 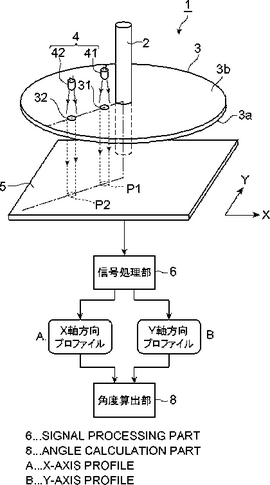 (もっと読む)
(もっと読む)
エンコーダ
【課題】 スケール板の動作角度等の絶対値を簡単な構成で精度良く検出し得るエンコーダを提供する。
【解決手段】 このエンコーダでは、スケール板において動作方向αに沿ったラインL1上に複数形成された光中継部4のそれぞれは、光透過部5及び光遮断部6の1次元配列のパターンが互いに異なっている。これにより、そのパターンをコードとして、第2光強度プロファイルデータVY(m)に基づき、受光領域100上に位置する光中継部4を識別することができる。更に、第1光強度プロファイルデータVX(n)に基づき、受光領域100中の基準位置に対する識別された光中継部4の重心位置を算出し、その重心位置からスケール板の動作角度を算出することができる。
(もっと読む)
1 - 9 / 9
[ Back to top ]