
Fターム[2F103ED34]の内容
Fターム[2F103ED34]に分類される特許
1 - 15 / 15
干渉計測装置
【課題】調整の容易な干渉計測装置を提供する。
【解決手段】撮像素子が受光した全体領域から第1および第2部分領域を抽出し、抽出された第1および第2各部分領域で受光した干渉光の強度を複数の時刻で取得し、各時刻における前記強度のうちの一方および他方をそれぞれX座標値およびY座標値としたときのY座標値の最大値と最小値との差分を第1差分Aとして算出し、X座標値およびY座標値の組み合わせのデータを一次関数で近似した場合の傾きαを算出し、この傾きがゼロとなるようにXY座標系を回転し、回転後のXY座標系におけるY座標値の最大値と最小値との差分を第2差分B’として算出し、δ=asin{(B’/cosα)/A}で表される角度δを算出し、当該角度δを干渉光の位相分布の均一性を示す指標として決定する。
(もっと読む)
ロータリエンコーダ装置、画像形成装置、及びロータリエンコーダホイール

【課題】回転体の駆動計測または計測に基づいた駆動制御を行い、かつ、ロータリエンコーダの取り付け偏心も検出または補正制御可能とするロータリエンコーダ装置を提供する。
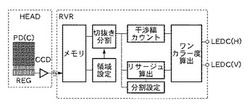
【解決手段】先ず(150)では、ロータリエンコーダからのアナログ出力を(151)でA/D変換し、(152)でP1、P2、P3・・・P72等のパターンごとに出力される(153)回転パルス信号成分抽出と、(154)偏心信号成分抽出を行っており、具体的には、偏心による『当該ロータリエンコーダにおいて、回転角度に対するHとLレベルパルス幅の比率に応じて回転軸芯に対するロータリエンコーダの取り付け偏心量と、偏心位相を検出する偏心量位相検出手段』のロータリエンコーダ1周分(P1、P2、P3・・・P72)のパターンから得られるH/(H+L)のSin関数の周期変動の振幅と位相を求め、その変動成分を分離(フィルタリング)する事により求められる。
(もっと読む)
アブソリュートロータリーエンコーダ
【課題】精度の点で有利なアブソリュートロータリーエンコーダを提供する。
【解決手段】第1軸の周りに一定の周期で複数のマークが配列され第2軸を回転中心として回転するスケールと、前記周期よりも小さいピッチで配置された複数の光電変換素子によって複数のマークの中の一部のマークを検出する第1検出器及び第2検出器のそれぞれから出力される周期信号に基づいて第1検出器の位置におけるスケールの絶対回転角度を算出する算出部と、を備える。前記算出部は、第1検出器から出力された周期信号の振幅を量子化することによってデータ列を生成し、該データ列を第1角度データに変換し、第1検出器及び第2検出器から出力された周期信号の振幅をそれぞれ規格化し、該振幅が規格化された周期信号を平均化し、該平均化された周期信号の位相から第1角度データよりも最小単位が小さい第2角度データを算出し、第1角度データと第2角度データとを合成する。
(もっと読む)
干渉型光ファイバーセンサーシステムおよび演算器
【課題】ダイナミックレンジの広い演算器が不要な干渉型光ファイバーセンサーシステムを提供する。
【解決手段】物理量を検知するセンシングファイバー11aおよびリファレンスファイバーを有する干渉計と、前記物理量の測定信号3を含む干渉光32aを、電気信号に変換するO/E変換器33と、前記電気信号から、正弦波成分および余弦波成分を抽出するAM復調器51a、51bと、該正弦波成分および該余弦波成分を用いて逆正接演算を行い、前記測定信号を含む信号を出力する逆正接演算器53と、前記逆正接演算器から出力された信号の所定時間毎の差分を算出し、該差分信号を出力する差分器61と、を備える。
(もっと読む)
ポジションエンコーダ装置
ポジションエンコーダ装置は、一連の位置フィーチャー(features)を備えるスケールと、スナップ写真取込みプロセスを介して一連の位置フィーチャーを読み取るように構成されたリードヘッドとを備える。スナップ写真取込みプロセスは、スケールとリードヘッド間の相対速度を補償するように適応できる。  (もっと読む)
(もっと読む)
位置検出装置と画像形成装置
【課題】温度変化が生じても、マークの位置を正確に検出することができる位置検出装置を提供する。
【解決手段】回転移動方向に所定間隔で検出用マークを有した無端回転体のマーク形成領域に対向配置されるべき位置検出装置であって、移動する上記マークを所定の検出位置で検出する複数の検出手段と、当該複数の検出手段を収容固定する収容保持部材と、上記複数の検出手段の夫々の検出部位の間の回転移動方向間隔を検知する検知手段とを備えるよう、構成する。
(もっと読む)
反射照明を使用した光学式位置変換器システムおよび方法
回転制限モータの回転子とともに回転する照明反射器に照明を向ける照明源と、照明源に隣接し照明反射器からの変調反射照明を受ける複数の検出器区域とを含む回転制限モータ用の位置変換器システムが開示される。 (もっと読む)
エンコーダ信号の補正回路
【課題】内挿処理に使用する2相の正弦波信号の周波数が高い場合にも、容易な演算処理で位相誤差を補正でき、位置検出精度が高いエンコーダ信号の補正回路を提供する。
【解決手段】AD変換器2の出力信号であるA1信号とB1信号のピーク値を検出するピーク検出器15と、検出したピーク値を用いてオフセットおよび振幅の誤差を補正してA2信号とB2信号を生成するオフセット/振幅補正手段4と、A2信号とB2信号の交点値を検出する位相誤差検出器7と、位相誤差検出器7で検出した交点値からA2信号とB2信号の補正係数を演算する位相補正手段6と、A相とB相の正弦波信号を位置データに変換する位置データ変換手段10を有した位置検出器において、A相とB相の正弦波信号の周波数を検出する速度検出器21と、オフセットおよび振幅と位相の補正値の更新を有効か無効かを切替える補正判定手段22を設ける構成とする。
(もっと読む)
ロータリエンコーダ装置、回転体駆動制御装置、画像形成装置、及びロータリエンコーダホイール
【課題】回転体の駆動計測または計測に基づいた駆動制御を行い、かつ、ロータリエンコーダの取り付け偏心も検出または補正制御可能とするロータリエンコーダ装置を提供する。
【解決手段】先ず(150)では、ロータリエンコーダからのアナログ出力を(151)でA/D変換し、(152)でP1、P2、P3・・・P72等のパターンごとに出力される(153)回転パルス信号成分抽出と、(154)偏心信号成分抽出を行っており、具体的には、偏心による『当該ロータリエンコーダにおいて、回転角度に対するHとLレベルパルス幅の比率に応じて回転軸芯に対するロータリエンコーダの取り付け偏心量と、偏心位相を検出する偏心量位相検出手段』のロータリエンコーダ1周分(P1、P2、P3・・・P72)のパターンから得られるH/(H+L)のSin関数の周期変動の振幅と位相を求め、その変動成分を分離(フィルタリング)する事により求められる。
(もっと読む)
エンコーダシステム、ステージ装置及び露光装置
【課題】高精度な位置の測定を行う。
【解決手段】露光装置100には、レチクルステージRSTの位置情報を測定するため、エンコーダ17Y1、17Y2、17Xを備えるエンコーダシステム16が設けられている。エンコーダ17Y1、17Y2、17Xのプローブ部19Y1、19Y2、19Xから発生られるレーザプローブは、スケール181上のパターンの配列方向に沿って振動し、その位置情報を含み、プローブの振動により変調された信号を出力する。変調された信号は、振動周波数の高調波によりその位相が検出され、その検出結果に基づいてレチクルステージRSTの位置情報が検出される。
(もっと読む)
透過型光学エンコーダ
【課題】別個のレチクルを利用する必要性なしに擬似正弦波出力信号を生成することが可能な光学エンコーダの提供
【解決手段】光学エンコーダ(10)は、光源(12)、検出器アレイ(13)、及びコード部材(20)を含む。検出器アレイ(13)は、光源に対して間隔をおいて配置され、少なくとも1つの検出器セット(14)を含む。少なくとも1つの検出器セットのそれぞれは、複数の検出器要素(16)を含む。コード部材(20)は、1)光源と検出器アレイとの間に配置され、2)移動方向に沿って検出器アレイに対して移動可能であり、及び3)コード部材が検出器アレイに対して移動する際に、光源によって放出された光(56)が検出器アレイを横切って進む光スポット(58)を生成するようにフィルタリングされる複数の円形開口または楕円開口(22)を画定する。他の実施形態も開示される。
(もっと読む)
光電式エンコーダ及び受光アレイ素子
【課題】光学系結像性能の収差(歪み)等によって縞周期がばらついても、1種類の受光アレイ素子で対応できるようにして、低価格化を実現する。
【解決手段】スケール10、64と受光アレイ素子40、66を有する光電式エンコーダにおいて、受光素子(フォトダイオード43)が測定方向に細分化された受光アレイ素子40(フォトダイオードアレイ部42)、66と、各受光素子(43)を、検出すべき縞の周期に合わせてオンオフするための手段(コンパレータ部44、縞周期検出部50、選択スイッチ部46、増幅回路52)を備える。
(もっと読む)
弾性波検出装置
【課題】被検査対象物から発生するAEをセンサホルダの共振波として検出すると共に、そのAE波の発生箇所を特定することにより、被検査対象物の腐食および疲労破壊等の箇所を特定することが可能な弾性波検出装置を提供する。
【解決手段】光源2と、第1カプラ4と、参照光用光ファイバ5と、センサ用光ファイバ6と、光ファイバ5、6の一方端から他方端に向けて導光された光を重ね合わせる第2カプラ7と、その重ね合わされた光の強度を検出する光検出器8、9と、被検査対象物20に発生する弾性波を検出する処理装置12と、光検出部8、9の検出信号からノイズ成分を抽出するフィルタ14および積分器15と、ノイズ成分に基づいて、当該ノイズ成分を除去するように参照光用光ファイバ5の伸縮を制御するアクチュエータドライバ16、センサホルダ18およびアクチュエータ51とを設ける。
(もっと読む)
アブソリュートエンコーダ
アブソリュートエンコーダ1の回転軸2に取り付けられた回転板3に、所定の位置関係で第1の開口31、第2の開口32を形成し、回転板3の下面3aに対向するように2次元のプロファイルセンサ5を設置する。また、回転板3の開口31、32を挟んでプロファイルセンサ5の光感応領域と対向するように、光源41、42からなる光供給部4を設置する。そして、光源41、42から供給された測定光が回転板3の開口31、32を通過してプロファイルセンサ5で検出された第1検出位置P1、第2検出位置P2の相関によって、回転軸2の回転角の絶対値を算出する。これにより、回転軸の回転角の絶対値を簡単な構成で精度良く測定できるアブソリュートエンコーダが得られる。 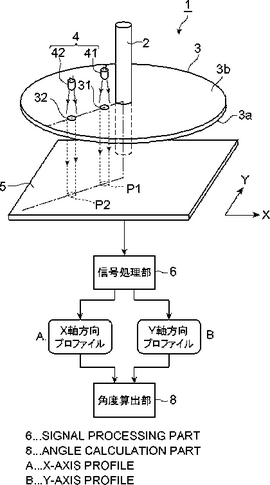 (もっと読む)
(もっと読む)
内挿分割回路
【課題】本発明は、キャリア成分f(ωt)を含まない2相出力信号を用いて閉ループ方式にて内挿分割し、回路構成を簡略化することを目的とする。
【解決手段】本発明による内挿分割回路は、互いに位相が異なる第1、第2出力信号(SX,SY)は内挿回路(70)のcos,sin乗算回路(713,714)に入力され、各cos,sin乗算回路(713,714)からの各乗算出力が減算回路(715)に入力されて減算処理されて偏差(ε)が出力され、この偏差(ε)を用いて位置データ(φ)を得る構成である。
(もっと読む)
1 - 15 / 15
[ Back to top ]