
Fターム[2F112FA21]の内容
Fターム[2F112FA21]に分類される特許
561 - 572 / 572
物体検出装置
【課題】画像上で複数の物体が接近し又は一部重複している場合でも、各物体を個別且つ安定に識別する。
【解決手段】検出されたトラック70の空間上での位置に基づいて物体位置領域82aを算出する。前時刻に記録された物体位置領域82aに相当するテンプレート80aを呼び出す。テンプレート80aを基準画像Ib上で類似度が最大となる位置に移動させる。物体位置領域82aと移動したテンプレート80aとの重なり割合(R(t-1)∩Rt)を算出する。重なり割合を用いて、過去に検出された物体と同一か否かを判断する。
(もっと読む)
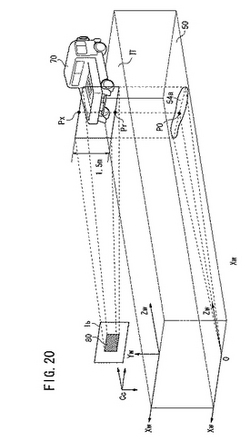
移動体周辺監視装置

【課題】ステレオ画像に基づいて物体を検出する際、計算時間の短縮と計算コストの低廉化を図る。
【解決手段】基準カメラ12により基準画像Ibを撮像し、参照カメラ14により参照画像Irを撮像する。基準画像Ib及び参照画像Irから平面領域Πfを抽出する。基準画像Ibからエッジや特徴点を抽出したエッジ画像を作成し、平面領域Πfを除去した修正エッジ画像62を生成する。修正エッジ画像62のエッジや特徴点に対して参照画像Irを参照しながら物体検出処理を行う。
(もっと読む)
測距装置
【課題】 本発明は、測定分解能を変更することのできる測距装置を提供することを目的とする。
【解決手段】本発明の測距装置は、測距対象物に向けて所定の測定用信号を発信する発信部(110)と、前記測距対象物の方向から戻る信号を受信する受信部(120)と、前記発信部及び前記受信部を駆動する測定処理を実行し、前記受信部で受信された信号に基づいて前記測定用信号の発信から受信までの時間を検知すると共に、前記受信部が信号を受信する際の分解能を可変にする制御部(100’)とを備えたことを特徴とする。
(もっと読む)
3次元画像システムにおける範囲または距離またはレインジ(range)の決定
対象物の画像化のシステムと方法。
検出器アレイの画像が画像面に配設される。検出器の各アレイは内挿部を有しているタイミング回路に接続され内装器はそれが放電する時とは異なった速度で第1のキャパシタを充電する第1の回路を含む。光パルスは対処物の方に送られるので光パルスの一部分は反射パルスとして対象物から反射され光パルスがいつ対象物へ送られたかを示す第1の値が記録される。反射されたパルスは1またはそれ以上の検出器で検出されそのパルスのパルス特性とその反射パルスが検出器にいつ到達したかを表わす第2の値とが記録される。対象物との範囲はその後第1及び第2の値と反射されたパルス特性の関数として計算される。
(もっと読む)
サインに基づく人間−機械相互作用
コミュニケーションは、人間−ロボット相互作用における重要な問題である。サインは、ユーザの命令又はコマンドを提供することにより機械との相互作用に用いられる。本発明の一実施形態は、人間の検出、人間のボディパーツ検出、手形状分析、軌道分析、向き決定、ジェスチャマッチング等を含む。形状及びジェスチャの多くの型が、コンピュータビジョンに基づく煩わしくない様式で認識される。多くのアプリケーションが、家電の遠隔制御、コンピュータ制御装置のマウスレス(及びタッチレス)操作、ゲーミング及び他方に命令を与えるための人間−ロボットコミュニケーションを含むこのサイン理解技術により実現可能となる。動的な検出ハードウェアが、ビデオレートでの深度画像のストリームを取得するために用いられ、深度画像のストリームは、情報抽出のために順次分析される。 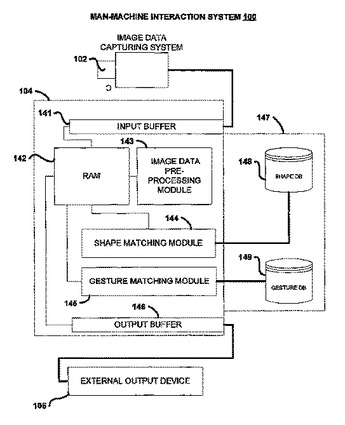 (もっと読む)
(もっと読む)
オブジェクト検出方法、オブジェクト検出装置、およびオブジェクト検出プログラム
本発明の利点は、オブジェクトを適切に検出することである。本発明におけるオブジェクト検出装置は、オブジェクトまでの距離を決定する複数のカメラと、距離を決定する距離決定部と、ピクセルの距離に対するピクセル度数を特定するヒストグラム生成部と、最もありそうな距離を決定するオブジェクト距離決定部と、距離の差に基づくピクセルの確率を提供する確率マッピング部と、ピクセルのグループとしてカーネル領域を決定するカーネル検出部と、カーネル領域の近傍にあるピクセルから選択したピクセルのグループとして縁領域を決定する縁検出部と、オブジェクトが所定の確率で現れるオブジェクト領域を特定するオブジェクト特定部と、を有する。  (もっと読む)
(もっと読む)
位置判定及びモーショントラッキング
プロセッサベースのシステム(301)において使用される位置判定及びモーショントラッキングのためのシステム及び方法。実施形態は、固定点(132)を中心として少なくとも1つの方向に動く方向転換器(130)と、サーチビーム(131)を位置ビーム(141)として反射する対象物(101)と、方向転換器の向きから少なくとも1つの角度位置を判定する論理回路(160)と、固定点(132)からの対象物の距離(104)を判定する論理回路(161)とを含む場合がある。  (もっと読む)
(もっと読む)
距離算出装置および算出プログラム
移動物体と対象物との間の方位角や、速度、ヨーレートなどの各種の状態量に基づいて、移動物体と対象物との間の距離を正確に算出することを目的とする。算出装置1は、移動物体と対象物との間の方位角を算出する手段2と、2つの時点間の移動物体の移動距離を算出する手段3と、移動方向の角度変化量を算出する手段4と、手段2、手段3、手段4の出力を用いて移動物体から対象物までの直線距離を算出する手段5とを備える。 (もっと読む)
三次元及び色彩検出における電荷管理のための方法及び装置
本発明の様々な実施形態では、オンチップ測定情報を、順番にではなく、ランダムに出力することができ、三次元画像を必要とするオブジェクト追跡、及び他の情報のためのオンチップ信号処理を、すぐに遂行することができる。システム全体は小さく、強固で、かなり少ないオフチップの別個の構成要素を必要とし、かつ、検出信号特性の改善を示す。オンチップ回路は、そのようなTOFデータを使って、場面内の一つのオブジェクト、又は全てのオブジェクト上の全ての点の距離及び速度を、同時に、容易に測定することができる。同様に、オンチップ回路はまた、検出センサ内の各画素における検出画像の分光組成を特定することができる。有利なことに、その個々の画素が分光組成を特定することができるセンサを使用して、さらに、TOF情報を特定することもできる。  (もっと読む)
(もっと読む)
自動フレーミングカメラ
【課題】 静止状態の被写体を探し出し自動的にフレーミングして撮影する自動フレーミングカメラを提供する。
【解決手段】 パンモータ及びチルトモータで一方向の測距が可能な測距ユニット(発光素子、受光素子)の測距方向Dが変更され(S108〜116)、測距ユニットからの信号変化で静止状態の人物Pが探し出される(S118〜122)。そして、チルトモータにより探し出された人物Pの顔の中心に撮像素子の撮影方向Dが向けられて画角の中心に人物の顔の中心がフレーミングされて(S124〜138)、撮像素子で人物の顔が撮影される。
(もっと読む)
測距装置
【課題】 AFの為にも苦手な被写体が無く、しかもタイムラグ対策やまぶしさ対策が図られた測距装置を提供すること。
【解決手段】 被写体像をモニタして複数の像信号を出力する複数のセンサアレイ3a,3bと、これらセンサアレイから出力される複数の像信号が測距演算に適した信号であるか否かを判定する手段(パターン判定部11)と、この手段の判定結果に応じて被写体にパルス光を投射する手段(IRED4a又はストロボ装置5a)と、上記各センサアレイに定常的に入射する信号光に基づく像信号を除去し上記パルス光に応じた複数の信号を抽出する手段(定常光除去部7,A/D変換部16)と、この手段により出力される所定の抽出信号を用いて被写体距離を算出する手段(制御部1a)とを備えた測距装置を提案する。そして上記判定部11の判定基準としては、上記像信号のコントラスト、その像信号の変化率の高低、或いはその像信号のパターンの規則性を用いる。
(もっと読む)
3次元画像検出装置の焦点調節機構
【課題】 被写体の視覚情報である2次元画像情報と赤外線により被写体の距離情報である3次元画像情報を検出する3次元画像検出装置において、各検出を迅速かつ常に合焦された状態で行う。
【解決手段】 CCDの色分離フィルタFに赤(R)、緑(G)、青(B)の各波長を中心にした狭い帯域のみに分光透過率特性をもつバンドフィルタと赤外領域のみに分光透過率特性をもつバンドフィルタを用いる。RGBの色フィルタが設けられた画素に対してコントラスト方式の焦点調節を行う。2次元画像情報を検出後、メモリ24に記録されたデータに基づいて、レンズ駆動回路27を駆動し光学系の焦点面を所定距離移動させる。赤外線レーザをレーザダイオード14aから照射して3次元画像情報として検出する。
(もっと読む)
561 - 572 / 572
[ Back to top ]