
Fターム[2F112FA21]の内容
Fターム[2F112FA21]に分類される特許
1 - 20 / 572
対象物識別装置および対象物識別方法
【課題】画像データからより確実に移動対象物を検出し識別する。
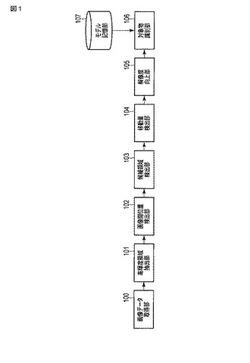
【解決手段】画像データ取得部(100)にて対象物を撮影した画像データを規定のレートで順次取得し、画素間位置検出部(102)にて順次取得される複数の画像データ間の相対位置を検出し、候補領域抽出部(103)にて前記相対位置から前記複数の画像データ間の差分を検出しその差分を前記対象物の候補領域として1つもしくは複数抽出し、移動量検出部(104)にて前記複数の画像データにわたって前記候補領域の移動量を検出し、解像度向上部(105)にて前記移動量を基に前記候補領域の解像度を向上させる。一方、予め対象物のモデルパターンをモデル記憶部(107)に記憶しておき、対象物識別部(106)にて、解像度を向上させた候補領域と記憶されたモデルパターンとを比較して対象物を識別する。
(もっと読む)
距離計測装置

【課題】計測距離の精度向上を図る。
【解決手段】駆動部14によりレーザ光の照射方向が鉛直下方向になったときに計測される距離計測装置と地面との距離と、メモリに記憶された情報に基づいて特定される距離計測装置と地面との距離の差分から計測距離の総合誤差を算出し、この計測距離の総合誤差を用いて計測距離が補正する。
(もっと読む)
画像解析装置及びこれを用いた物体検出装置
【課題】対象物体上の外表面形状によらず、対象物体までの距離を利用した適正な制御や処理を実現することを課題とする。
【解決手段】自動車に搭載された2つのカメラ10A,10Bで自車両周囲の撮像領域を撮像して得られる複数の撮像画像を解析して対象物体までの距離を算出する際、撮像領域に向けて互いに異なる方向から非可視光を照射する2つの光照射部21,22の光照射時期が互いに重複しないように交互に非可視光を照射し、当該非可視光の照射によって対象物体の外表面に生じる非可視光の照射領域と非照射領域との境界線C1,C2上の同一の地点を映し出す対応点を光照射時期ごとにそれぞれ特定し、光照射時期ごとに、対応点のズレ量に基づいて距離を算出する。
(もっと読む)
画像処理装置、車両システム、及び、画像処理方法
【課題】天候及び距離によらず好適に物体までの距離を算出する。
【解決手段】画像処理装置は、取得された第1の車両の前方の画像から、第1の車両の前方の第2の車両の画像を検出する車両検出部と、第1の車両と第2の車両との距離を算出するために必要な複数のパラメータのうち、第2の車両の画像と前方の画像とから取得できないパラメータを判定する状況判定部と、第2の車両の画像と前方の画像とからパラメータを取得し、取得されたパラメータによって第1の車両と第2の車両との距離を算出する少なくとも一つの距離測定部と、を備え、状況判定部が、取得できないパラメータを判定した場合、少なくとも一つの距離測定部は、状況判定部によって判定された取得できないパラメータ以外のパラメータを用いて第1の車両と第2の車両との距離を算出するため、第2の車両の画像と前方の画像とを取得する。
(もっと読む)
距離計測装置
【課題】発光素子の温度変化に対する計測精度の変化を抑制する。
【解決手段】投光手段1は、対象空間に投光する発光素子11を備え、受光手段2は、対象空間からの光を受光する受光素子21を備える。制御手段3は、投光手段1に変調信号を与えて発光素子11から時間経過に伴って強度が変化する変調光を投光させ、変調信号に同期する復調信号を受光手段2に与えて受光素子21の出力から変調光の成分を抽出する。演算手段4は、投光手段1から対象空間に投光された変調光が受光手段2に受光されるまでの時間を計測することにより、対象空間に存在する物体までの距離を算出する。温度測定手段6は、発光素子11の温度を計測し、精度維持手段7は、温度測定手段6が計測した温度が高いほど発光素子11の駆動電流を大きくし、発光素子11の温度変化に対して受光素子21に入射する変調光の変化を抑制する。
(もっと読む)
測距センサを備える距離測定装置および距離測定方法
【課題】装置に要求される距離範囲内における測距精度を向上させるとともに、センサの個体バラツキを補正した出力値―距離変換を実現する距離測定装置、距離測定方法、および該距離測定装置を備えた表示装置を提供する。
【解決手段】出力値と距離とが反比例の関係を有するPSDセンサ20において、装置に要求される距離範囲内における最長距離での出力値に応じたオフセット補正を行う調整部21と、該装置に要求される距離範囲における最短距離での出力値に応じてゲイン補正を行う増幅部22を設ける。さらに、中間距離での出力値を測定し、最長距離・最短距離・中間距離の3点での出力値に基づいて、測距センサ固有の特性曲線を求め、PSDセンサ20の出力値を該特性曲線に当てはめることによって、測定対象物までの距離を算出する算出部23を設ける。
(もっと読む)
レーザレーダ装置およびレーザレーダ装置による撮像目標選択方法
【課題】背景に輝度の非常に高いクラッタが存在する場合、画像信号からクラッタ成分を除去できない。
【解決手段】一実施形態によれば、レーザ光の送信部11と、受信部12と、複数の撮像素子を有する撮像部13と、目標までの相対距離を演算し受信タイミング信号を出力する測距器14と、この受信タイミング信号の受信期間に重なる第1の露光タイミング信号およびこの受信期間と重ならないタイミングを持つ第2の露光タイミング信号を撮像部13へ与えるタイミング生成部15と、各露光タイミング信号によって撮像された画像信号から複数の画素および画素毎の輝度を対応させた画像データを生成する画像処理部16とを備え、画像処理部16は第1の露光タイミング信号により目標および背景を含む画像を生成し、第2の露光タイミング信号により背景を含む画像を生成し、これらの画像間で輝度の差分を求めるレーザレーダ装置が提供される。
(もっと読む)
画像処理装置
【課題】パターンマッチングの対象となる一対の画像データにおける空間周波数の偏差を抑制することで、適切にパターンマッチングを遂行する。
【解決手段】画像処理装置120は、ベイヤー配列で構成される一対の画像データにおいて、各画素に未設定の色相の輝度を隣接する画素に基づいて復元する色復元部172と、一対の画像データにおいて、各画素に予め設定されている色相の輝度を周囲の画素に基づいて合成する色合成部174と、一対の画像データそれぞれから所定の大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定するマッチング処理部180と、を備える。こうして、空間周波数の偏差を抑制して適切にパターンマッチングを遂行することが可能となる。
(もっと読む)
段差部認識装置
【課題】ステレオカメラにより取得されるステレオ画像を利用して、階段等の段差部の踏面の先端側エッジの空間的な位置及び方向を含む該段差部を配置位置を精度良く認識することができる装置を提供する。
【解決手段】カメラ3R,3Lのうちの基準画像に、複数条の演算処理領域R3min(k2)を設定すると共に、複数条の演算処理領域R3min(k2)のそれぞれにおける実エッジ投影線L52rの複数の候補位置v(k1)を設定し、各演算処理領域毎に、各候補位置の実エッジ投影線(段差部の先端側エッジの投影線)の位置に対する適合度を表す評価関数の値を射影変換を利用して算出する。実エッジ投影線を推定してなる推定エッジ投影線を、複数条の演算処理領域R3min(k2)のそれぞれにおける推定エッジ投影線の位置の適合度を合成してなる合成適合度が最も高くなるように決定する。推定エッジ投影線と段差部の踏面の平面パラメータとに基づいて段差部の空間的な配置を認識する。
(もっと読む)
ボンディング装置
【課題】サーチ動作又はボンディング前のボンディング点の高さ測定を行うことなしに、高速でボンディングが可能なボンディング装置を提供すること。
【解決手段】上下方向に揺動可能なボンディングアームに搭載されて、被ボンディング部品の表面に位置するボンディング点の合焦点の検出を行う共焦点光学系と、前記ボンディングアームと一体に可動してボンディングを行うボンディングツールと、前記ボンディングツールの位置を検出する位置検出手段と、を有し、ボンディングツールのボンディング点への下降中に、共焦点光学系による合焦点検出により位置検出手段で検出したボンディングツールの位置から、前もって設定したボンディング点までの所定の距離(合焦点基準下降量)をボンディングツールが下降して、ボンディング点上で停止するように制御する。
(もっと読む)
運転支援装置
【課題】車両近傍の物体検出を精度よく行うことができる運転支援装置を提供することを目的とする。
【解決手段】本発明の運転支援装置は、車両周囲を撮像する撮像カメラ10と、車両周囲に照射光を発するLED23と、反射光を取得する第2の撮像素子21と、反射光に基づいて距離画像を算出する第2の信号処理部22と、距離画像から物体を検出する物体検出処理部36とを備える。そして、第2の信号処理部22が算出した距離画像のうち物体検出処理部36が検出した物体を示す画像を撮像カメラ10が撮像した撮像画像に合成する合成手段37と、この合成手段37が合成した合成画像を表示する表示装置40を備えたことを特徴とする。
(もっと読む)
ステレオカメラ及びステレオカメラの校正方法
【課題】障害物までの距離を測距するステレオカメラが取り付けられたガラスに歪みが発生しても、光軸のずれによる測距精度の低下を抑制する。
【解決手段】フロントガラス10の上部内面に、独立した左右一対のカメラ12L及び12Rを取り付けると共に、カメラ12L及び12Rの間に位置するフロントガラス10の内面に、歪み検出方向が異なるように配置された2つの歪みセンサ16及び18を取り付ける。そして、制御装置20は、歪みセンサ16及び18で検出した歪みA及びBと補正値とを関連付けた補正マップを参照し、カメラ12L及び12Rで撮像された一対の画像について、矩形領域の部分画像を切り出す位置を補正値だけずらすことで、光軸のずれを校正して測距精度の低下を抑制する。
(もっと読む)
画像処理装置、画像処理方法、プログラム、および画像処理システム
【課題】画像解析の処理負荷および精度を改善するための画像処理装置、画像処理方法、プログラム、および画像処理システムを提供する。
【解決手段】距離画像センサにより取得される対象空間における各位置の距離が表現された距離画像の解析結果に基づき、前記対象空間を撮像する撮像装置により取得される撮像画像から注目領域を決定する注目領域決定部と、前記注目領域決定部により決定された前記注目領域を画像解析する画像解析部と、を備える画像処理装置。
(もっと読む)
合焦位置を決定する方法及びビジョン検査システム
【課題】試料位置と合焦位置との間の差分を求める方法を提供する。
【解決手段】試料を示す画像データを獲得するステップと、獲得データから特徴セットを抽出するステップと、画像データ特徴を位置差分値に関連付けるように教え込まれた機械学習アルゴリズムを用いることにより、特徴セットを位置差分値に分類するステップとを含み、位置差分値が差分に対応する。任意に、特徴セットは対比特徴のサブセットを含みうる。任意に、対比特徴のサブセットは、画像データに基づく二乗勾配関数、画像データに基づくウェーブレット関数及び画像データに基づく自己相関関数、例えば、VollathのF4関数若しくはVollathのF4関数とVollathのF5関数との組合せ、全画像データの分散及び並びにLaplaceベースの焦点測定からなる群より選択されうる。
(もっと読む)
画像処理装置および方法、画像処理システム、並びにプログラム
【課題】複数のカメラにより得られる複数の画像の相対的な位置の調整を、経年変化の影響を受けることなく、低コストかつ低レイテンシで行う。
【解決手段】格納処理部は、基準となる基準画像に対して被写体が所定の角度の分ずれている入力画像の画素の画素データをバッファに格納し、読み出し部は、角度の分だけ回転させた場合の入力画像において基準画像に対応する対応領域にある、入力画像の画素の画素データを、バッファから読み出し、画素データ算出部は、読み出し部によって読み出された画素データに基づいて、入力画像を角度の分だけ回転させた回転画像の画素の画素データを算出する。本技術は、例えば、ステレオカメラを備える画像処理システムに適用することができる。
(もっと読む)
画像処理装置および方法、プログラム
【課題】 撮像画像データ中に鏡面反射光の成分が含まれている場合であっても、被写体までの距離を高精度に推定することを目的とする。
【解決手段】 偏光面が角度が異なる偏光フィルタが装着された複数のカメラにより撮像された複数の偏光画像データに基づき、被写体の鏡面反射光の強度と偏光面の角度との少なくとも何れか一方を推定し、その結果に基づいて被写体までの距離を推定する。
(もっと読む)
画像処理方法、ステレオカメラシステム
【課題】より短い処理時間で距離情報が得られる画像処理方法を提供すること。
【解決手段】第1の画像と第2の画像を撮影するステップと、加算手段241が、第1の画像の第1の合計値、及び、第2の画像の第2の合計値を算出する合計値算出ステップと、シフト手段242が記第1の合計値を所定ビット数、右にシフトして第1の近似平均値を算出し、同様に第2の近似平均値を算出する近似平均値算出ステップと、整数倍手段243,244が、第1の画像と第2の画像の小領域内の各画素データの値を整数倍する整数倍ステップと、相関値算出手段249が、該画素データの値を整数倍した値から第1の近似平均値を引いた第1のデータと、画素データを整数倍した値から第2の近似平均値を引いた第2のデータをそれぞれ求め、画素データ毎に前記第1のデータと第2のデータとの差分の二乗和を算出する相関値算出ステップと、を有する画像処理方法を提供する。
(もっと読む)
撮像装置および距離情報取得方法
【課題】撮影画像各部における被写体までの距離を正確に把握し、距離に基づきぼかし処理を施す。
【解決手段】測光スイッチS1がオンされると(S100)、レンズを駆動し複数の位置に焦点を合せながら各位置でのスルー画像をメモリに記憶する(S102)。AF処理における合焦位置にフォーカス(S104)する。レリーズスイッチS2がオンされると同合焦位置で主画像の撮影を行う。記憶された複数のスルー画像の各々を手ブレに応じた大きさの領域に分割し、撮影画像における各領域に対応する被写体までの距離情報を把握し、距離マップを作成する(S114)。距離マップに基づきマスクを作成し(S116)、被写体までの距離に応じたぼかし処理を施す(S118)。
(もっと読む)
画像処理装置および画像処理方法、プログラム
【課題】多眼方式の撮像装置で取得された画像群から、主被写体と背景を含む距離画像を提供する。
【解決手段】本発明に係る画像処理装置は、合焦位置が異なる複数の光学系を有する多眼方式の撮像装置によって撮像された複数の画像を取得する画像取得部(401)と、撮像装置によって撮像された複数の画像それぞれについて合焦画像となる領域を選択する合焦画像選択部(404)と、合焦画像選択部で選択された複数の合焦画像を使用して距離を算出する距離算出部(405)と、を備えたことを特徴とする。
(もっと読む)
計測装置、計測方法、及びプログラム
【課題】平坦でない路面上に存在する対象物の高さを正確に計算することができる計測装置、計測方法、及びプログラムを提供する。
【解決手段】センサ情報取得部21は、基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、基準位置から当該レーザが反射された点である反射点までの距離を計測するレーザセンサから計測結果を取得する。路面高特定部23は、記憶部22が記憶する路面高情報に基づいて反射点それぞれにおける路面高を特定する。高さ算出部29は、レーザセンサが算出したそれぞれの距離と路面高特定部23が特定した路面高とに基づいて、路面から前記反射点までの長さを対象物の高さとして算出する。
(もっと読む)
1 - 20 / 572
[ Back to top ]