
Fターム[2F112FA21]の内容
Fターム[2F112FA21]に分類される特許
201 - 220 / 572
列車の停止検知システム並びに列車の移動速度及び位置検出システム
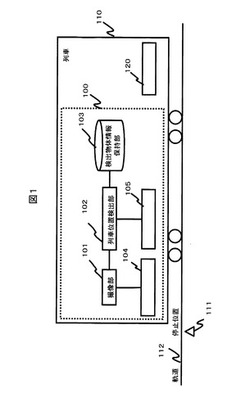
【課題】地上子位置からの列車の移動距離が長いと停止位置の検出精度が悪く、停止位置から反対方向への移動量に制限があり、また、列車の停止判定時に所定速度以下が検知できず数秒間の待ち時間によるタイムラグにより、ラッシュ時の列車の運転密度が低下する問題点があった。
【解決手段】列車の停止検知システムが、列車に搭載され画像信号を周期的に撮影する撮像部と、各駅の検出物体のテンプレート画像と、検出物体から停止位置までのオフセット距離を保持する検出物体情報保持部と、撮像部により撮影された画像から検出物体を検出して検出物体までの距離を元にして列車位置を検出する列車位置検出部と、撮影部により撮影された画像から列車の走行速度を検出する移動速度検出部と、列車位置検出部と移動速度検出部の結果を用いて列車が規定の停止位置に停車したことを判定する列車停止判定部とを有する。
(もっと読む)
場面の内容に基づく点群データの視覚化のための方法及びシステム
色と空間データを結びつけるシステム及び方法が提供される。前記システム及び方法において、場面タグが、場所についての放射測定画像800の部分804のために選択される。さらに、前記放射測定画像データの前記第一の部分に関連する前記空間データ200の部分が選択される。前記場面タグに基づいて、前記空間データの前記部分の色空間関数500、600が選択される。前記色空間関数は、前記空間データの高度座標の関数として、色相、彩度及び輝度(HSIを定義する。)前記空間データの前記部分は、前記空間データの前記部分に基づく前記色空間関数から選択されるHSI値を用いて表示される。前記システム及び方法において、場面タグはそれぞれ異なる区分に関連する。各色空間関数は、関連する区分の前記HSI値における所定の異なるバリエーションを表す。  (もっと読む)
(もっと読む)
画像処理装置、撮像装置およびプログラム

【課題】 撮像画像で焦点検出エリアに対応しない各々の部分についても、それぞれ被写体距離の情報を取得するための手段を提供する。
【解決手段】 画像処理装置の画像取得部は、撮像条件を変化させて共通の被写体を撮像した複数の撮像画像を取得する。画像選択部は、基準画像と、該基準画像と異なる1以上の参照画像とを選択する。合焦度算出部は、基準画像および参照画像を対象として、画像の合焦度を示す合焦評価値を、対象の各画像内における複数の領域毎に求める。距離推測部は、基準画像から求まる複数の第1合焦評価値と、参照画像から求まる複数の第2合焦評価値との間の変化量と、撮像条件情報とに応じて、基準画像の各領域に対応する被写体距離を推測する。
(もっと読む)
距離分布検知装置
【課題】撮像対象領域おいて距離を検知可能な領域を拡大しつつ検知精度を向上させる。
【解決手段】距離分布検知装置10は、複数の撮像素子23から出力される画像データに基づき画素に対応した実空間での距離情報による距離分布を取得する距離分布演算部32と、画像データを補正する機構部22および信号補正部31と、複数の補正毎の補正量が異なるように設定する補正量制御部40と、補正量の変化に応じて所定時間内に複数の画像データを取得し、各補正量毎に画像データに基づき距離分布を有する処理用画像を生成する処理用データ生成部33と、補正量の変化に応じた距離分布の変化量に基づき、複数の処理用画像を合成して距離画像を生成する距離データ生成部34とを備える。
(もっと読む)
距離画像処理装置および撮影装置
【課題】距離画像内で、位置を限定することなく、所望の抽出条件に適合する対象物を特定、抽出する。
【解決手段】距離画像内で、距離値を用いて検出対象となる対象物の候補を抽出する。距離画像内で、近接する距離値が所定以上連続する画素群を対象物候補として抽出する。抽出した対象物候補は、さらにパターンマッチング、速度制限などを用い、絞り込む。得られた対象物候補の中から抽出条件に適合するものを対象物として抽出する。また、抽出条件として、先に抽出したものと同じものを抽出するよう構成してもよい。
(もっと読む)
画像処理装置、画像照合方法、および、プログラム
【課題】より精度の高い距離算出を実現する。
【解決手段】特徴点抽出部213が、第1撮像部100Aおよび第2撮像部100Bで取得された画像の一方で特徴点を設定すると、テンプレート設定部214は、特徴点を含む基準テンプレートを、撮像画像のエッジ抽出画像上に設定する。基準テンプレート内の画像がエッジによって分断されている場合、テンプレート設定部214は、分断された領域のうち特徴点を含んでいない領域を基準テンプレートから削除し、削除した領域と同じ面積の領域を、分断された領域のうち特徴点が含まれている領域に、エッジを越えないように追加した変形テンプレートを設定する。距離算出部215は、基準テンプレートもしくは変形テンプレートのいずれかを用いて、他方の画像の他方に対するテンプレートマッチングをおこない、マッチングのとれた特徴点までの撮影距離を算出する。
(もっと読む)
光学デバイス、この光学デバイスを用いた物体検出方法及び電子機器
【課題】検出対象物の近接を検出できる光学デバイス、これを用いた物体検出方法及び電子機器を提供する。
【解決手段】赤外LEDと、反射光の光量及びスポット位置を示す信号を出力するCMOSイメージセンサと、出力された信号をアンプするとともに信号処理を実施する信号処理部20と、反射率ごとの検出物距離と受光量との関係、第1基準値及び第2基準値を示すデータが格納されたデータベース記憶部30とを備えたものであり、信号処理部20は、スポット位置に基づいて検出物距離を算出する第1信号処理と、検出物距離及び反射光の光量を反射率ごとの検出物距離と受光量との関係と比較して検出物の反射率を求める第2信号処理と、当該反射率が第1基準値と一致するか判断する第3信号処理と、一致する場合に検出物距離が第2基準値と一致するか判断する第4信号処理と、一致する場合に検出対象物の近接を示す信号を出力する第5信号処理とを実施する。
(もっと読む)
変位センサ
【課題】光源と絞りの共役関係を容易に確保でき、かつ、検査対象との距離の変化を正確に計測できる変位計、変位測定方法および厚み計を提供する。
【解決手段】変位計では、レーザダイオード1からの光が集光レンズ4において絞り板5のピンホール5aに向けて集光され、ピンホール5aを介して対物レンズ6へ送られる。当該光は、ワーク90の表面上で反射し、対物レンズ6、ピンホール5a、集光レンズ4、ハーフミラー3を介して、フォトダイオード2で検出される。つまり、ピンホール5aが、実質的な光源となり、また、ワーク90上での反射光に対する絞りとなっている。なお、集光レンズ4によってピンホール5a上で集光されるスポット径は、ピンホール5aの径よりも大きいものとされる。また、白抜き矢印で示された絞り板5上の戻り光成分の受光量信号は、ハイパスフィルタ11によって除去される。
(もっと読む)
3次元物体姿勢・位置検出装置、方法、およびプログラム
【課題】参照点等を与えることなく、3次元物体の位置(撮影したカメラから3次元物体の予め定められた点までの距離)を高精度に検出することを可能とした3次元物体姿勢・位置検出装置を提供することである。
【解決手段】提案する3次元物体姿勢・距離位置装置では、2次元画像の対象物中心点の位置を、その2次元画像と、その2次元画像の姿勢に加えた組み合わせとして作成した辞書データを記憶装置8内に有するために、事前に参照点や図形を辞書データの各2次元画像に入力することなく、また、ステレオカメラ16−1、16−2を用いることにより、認識対象の3次元姿勢および対象物中心点までの距離を容易に認識することができる。
(もっと読む)
バーコードを利用した認識方法および認識システム、ならびに、バーコードを利用した制御方法および制御システム
【課題】離れた認識対象物までの距離を、認識対象物の表面の傾きに大きく影響されずに判定でき、且つ、超音波信号や赤外線信号の測定範囲外の距離にある認識対象物との距離を判定できるバーコードを利用した認識方法を提案すること。
【解決手段】ロボット1が走行する直線経路11aの正面にある壁面12aに、異なるサイズの3つのバーコード13a〜13cを垂直に並べたバーコード群13を付しておく。バーコード13a〜13cのサイズを、ロボット1に設置したCCDカメラ7によって判別可能な最大距離がLa〜Lcとなるように設定する。直線経路11aを走行するロボット1のCCDカメラ7を垂直方向に走査して、これらのバーコード群13を撮影し、各バーコードが判別不能から判別可能に、あるいはその逆に切り替わった時点を検出して、切り替わり時点におけるロボット1と壁面12aとの距離を把握する。
(もっと読む)
車両用距離画像データ生成装置及び方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置及び方法を提供すること。
【解決手段】 投光器5と、イメージインテンシファイア7b及び高速度カメラ8と、タイミングコントローラ9と、高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10を備え、画像処理部10は、ノイズによる輝度を抑制しつつ移動平均に基づいて、距離画像データの生成に用いられる輝度を補正するステップS3〜S5の処理を備えた。
(もっと読む)
車両用複眼距離測定装置及び複眼距離測定方法
【課題】 簡単な演算処理により、複眼カメラの位置ずれに伴う距離測定誤差を低減できる車両用複眼距離測定装置の提供。
【解決手段】 自車両に所定の間隔で離間して搭載した2個以上のカメラ1,2による撮像から、三角測量の原理により前記自車両と前記撮像の中の対象物との距離を算出する複眼距離算出手段と、前記自車両に搭載したカメラによって撮影した、前記自車両近傍の他車両に取り付けられたナンバープレートの撮像(ナンバープレート像という。)に基づき、前記自車両と前記他車両との距離を基準距離として算出する基準距離算出手段と、前記複眼距離算出手段により算出した前記自車両と対象物との距離を、前記基準距離を用いて校正する測定距離校正手段と、を備える車両用複眼距離測定装置。
(もっと読む)
光学式変位センサシステム、コンソール、コントローラ、およびプログラム
【課題】光学式変位センサを用いて対象物までの距離を簡単に且つ精度良く測定する。
【解決手段】測定対象物に光を投光して、イメージセンサで反射光を受光し、各画素での受光信号出力値を取得する。表示画面上に受光信号出力波形を表示して、表示画面上での画素位置の範囲(有効画素範囲)を設定し、有効画素範囲内での最大受光信号出力値が所定の基準出力値と一致するように検出感度を変更する。そして得られた検出感度を用いて測定対象物の変位を測定する。こうすれば、たとえ測定しようとする箇所から十分な強度の反射光が受光できない場合でも、その箇所を含むように有効画素範囲を設定することで、適切な検出感度を用いて精度良く測定することが可能となる。
(もっと読む)
距離情報取得装置、撮像装置、及びプログラム
【課題】所望のシーンにおける被写体距離情報を高速且つ高精度に取得することが可能な距離情報取得装置、撮像装置、及びプログラムを提供すること。
【解決手段】互いに異なる複数の焦点位置での撮像で取得された複数の画像データについて、所定位置の画素を含むカーネル領域を設定し、該カーネル領域内の画素を対象として画像処理を実行して前記複数の画像データ間のぼけの相関量を算出して撮像対象の被写界までの距離を表す距離情報を算出するDFD測距手段を具備する距離情報取得装置に、被写界を写した画像データを複数の測距対象領域に分割する測距領域分割手段と、前記被写界領域を示す画像データ上に設置する総測距点数を決定する測距点数制御手段と、各々の前記測距対象領域に設置する測距点密度を決定する制御手段と、前記総測距点数及び前記測距点密度に基づいて、前記測距対象領域に測距点を配置する測距点設置手段と、を具備させる。
(もっと読む)
撮影システム及びレンズ装置
【課題】複数の被写体から主被写体を自動的に選択し、距離や速度等の被写体情報を表示する。
【解決手段】撮影システムは、撮影範囲内に設けられた複数の測距エリア1〜16のそれぞれにおいて被写体距離を算出する距離算出手段114と、複数の測距エリアのそれぞれにおいて被写体速度を算出する速度算出手段116と、被写体距離、該被写体距離間の差、被写体速度、及び該被写体速度間の差のうち少なくとも1つを表す被写体情報を生成する情報生成手段114,116と、複数の測距エリアのうち、速度算出手段により算出された被写体速度が第1の範囲SA内である測距エリアを抽出する抽出手段117と、カメラにより生成された撮影映像と抽出手段により抽出された測距エリアに対応する被写体情報とを含む出力映像を生成する出力映像生成手段203とを有する。
(もっと読む)
撮像装置及び半導体回路素子
【課題】高速で高精度な視差演算を可能とする撮像装置を提供する。
【解決手段】複数のレンズ部と、それらのレンズ部に一対一に対応して設けられ、光軸方向に対して略垂直な受光面有する複数の撮像領域と、生成された撮像信号の入力を受ける撮像信号入力部133と、撮像信号入力部133へ転送される撮像信号の転送範囲を決定する転送範囲決定部144と、転送範囲決定部144により決定された転送範囲に応じた撮像信号を撮像信号入力部133へ転送するように前記撮像領域を駆動する撮像領域駆動部132と、撮像信号入力部133に転送された撮像信号に基づき視差を演算する視差演算部142とを備えており、転送範囲決定部144は、前記複数の撮像領域のうち少なくとも2つの撮像領域で生成される撮像信号を転送範囲と決定する第1の動作モードと、第1の動作モードとは異なる撮像信号を転送範囲と決定する第2の動作モードとを切り替える。
(もっと読む)
測距装置および測距方法並びにプログラム
【課題】位相シフト法を用いて測距を行う際に、誤測距を防止する。
【解決手段】照射部16が、強度が周期的に変化する縞パターン光を、パターンの位相をπ/2ずつ移動させつつ被写体に照射する。撮像部2が縞パターン光の移動の周期における0、π/2、π、3π/2の4つの位相において反射光を受光して受光信号F1,F2,F3,F4を得る。距離画像生成部31が、第1の加算信号(F1+F3)と第2の加算信号(F2+F4)との差分値の絶対値を算出し、絶対値をしきい値Th1と比較し、絶対値がしきい値Th1未満となる受光信号を取得した受光素子においてのみ距離情報D1を算出する。
(もっと読む)
車両周辺監視装置
【課題】車両に搭載された2台の撮像手段により撮像された同一の対象物の画像部分の視差に基づいて、対象物と車両との距離を算出するときの誤差を低減することができる車両周辺監視装置を提供する。
【解決手段】所定時点で前記第1の撮像手段により撮像された第1画像から、実空間上の対象物の第1画像部分を抽出し、該所定時点で前記第2の撮像手段により撮像された第2画像から、該第1画像部分と相関性を有する第2画像部分を抽出して、該第1画像部分と該第2画像部分との視差を算出する視差算出手段22と、実空間上の同一の対象物について、視差算出手段22により時系列的に視差を算出して、視差勾配を算出する視差勾配算出手段23と、車両の速度を検出する速度センサ4と、視差勾配と車両の速度とに基づいて、車両から対象物までの距離を算出する第1の距離算出手段24とを備える。
(もっと読む)
距離計測装置及びプログラム
【課題】対象物の3次元位置を精度よく計測することができるようにする。
【解決手段】第1撮像部20及び第2撮像部22によって、撮像対象物を各々異なる位置から撮像して、複数の撮像画像データを出力し、3次元距離算出部24によって、出力された複数の撮像画像データに基づいて、撮像対象物を表わす領域内の各画素に対応する3次元位置までの距離を算出して距離画像を生成する。レーザレーダ14によって、レーザの走査方向に並んだ各2次元位置までの距離を計測する。座標変換部32によって、レーザレーダ14によって距離が計測された2次元位置を、距離画像の画素座標に変換する。補正領域抽出部34によって、変換された画素座標に基づいて、位置距離画像から補正対象領域を抽出し、3次元距離補正部36によって、補正対象領域内の各画素に対応する3次元位置までの距離を、レーザレーダ14によって計測された距離に補正する。
(もっと読む)
3次元形状計測用撮影装置および方法並びにプログラム
【課題】被写体にパターン光を照射することにより取得した画像を用いて、被写体の3次元形状を正確に計測する。
【解決手段】第1のカメラ2により被写体のプレ画像を取得し、演算部5がプレ画像上に複数の領域からなる照射範囲を設定する。さらに、照射範囲内の領域毎にパターン光照射の有無を判定する。次いで、第1および第2のカメラ2,3によりパターン光を照射しない撮影およびパターン光を照射する撮影を行い、非照射基準画像G1および照射基準画像G1′、並びに非照射参照画像G2および照射参照画像G2′を取得する。これらの画像の画像データから画像ファイルを生成し、画像ファイルのヘッダに照射範囲内の各領域におけるパターン光照射の有無の情報を記述する。
(もっと読む)
201 - 220 / 572
[ Back to top ]