
Fターム[2F112FA21]の内容
Fターム[2F112FA21]に分類される特許
101 - 120 / 572
車載カメラを用いた測距装置
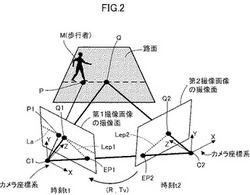
【課題】単一の車載カメラによって取得される撮像画像を基に、車両の外部の移動体と自車両との間の距離を測定することできる測距装置を提供する。
【解決手段】車載カメラ2により異なる時刻で取得された第1撮像画像と第2撮像画像のうちの第1撮像画像において、移動体Mの路面に対する接地点Pに対応する画像上移動体接地点P1を特定し、車両との間の距離が移動体Mの接地点Pと同一の距離となる静止点Qに対応する第1撮像画像上の点Q1と第2撮像画像上点Q2とを第1撮像画像及び第2撮像画像から抽出する。抽出した点Q1,Q2を用いて、モーションステレオの手法によって、静止点Qと車両との間の距離と算出し、算出した距離を移動体Mと車両との間の距離として決定する。
(もっと読む)
回折光学素子、並びに測距装置及び測距方法

【課題】ねじれビームを出射する小型の回折光学素子、並びに、小型の測距装置、及び小型の回折光学素子を用いた測距方法を提供する。
【解決手段】回折光学素子130は、x軸、y軸、及びz軸からなる座標空間において、前記x軸と平行な偏平面を形成しながら前記z軸の方向へ進行する平行光の進行方向を、前記z軸の方向へ所定の距離だけ進行した位置において、前記偏平面の前記x軸と成す回転角度が所定の角度となるように変更する第1回折格子が形成されている。
(もっと読む)
距離計測装置及び距離計測方法
【課題】ロボットや車両等の移動物体に搭載しても途切れることなく常に距離を計測することのできる距離計測装置を提供する。
【解決手段】本発明の距離計測装置は、搭載された移動物体の移動方向に投光パターンを照射する投光部2と、投光パターンが照射された方向の画像を撮像する撮像部3と、撮像部3で撮像された画像から計測対象物に照射された投光パターンのドットを抽出する照射光抽出部4と、照射光抽出部4で抽出された投光パターンの照射方位を算出する照射方位算出部5と、照射方位と撮像部3の撮像方向と投光部2と撮像部3との間の距離とを用いて幾何学的関係から計測対象物までの距離を計測する距離計測部6とを備えており、投光パターンは、移動物体の移動方向にある消失点から放射される直線上に複数のドットを配置した構成になっていることを特徴とする。
(もっと読む)
距離画像センサ及び距離画像生成装置並びに距離画像データ取得方法及び距離画像生成方法
【課題】低価格な距離画像センサ及び距離画像生成装置並びに距離画像データ取得方法及び距離画像生成方法を提供する。
【解決手段】距離画像センサ100は、x軸、y軸、及びz軸からなる座標空間において、入射された平行光が複数の分割光に分割され、z軸に交差する所定の投光平面上に、複数の分割光が形成する複数の投光スポットによって画定される複数の線分とx軸とが成す複数の角度が所定の角度となるように、入射される平行光の進行方向を変更する回折格子が形成された回折光学素子131及び132を備える。さらに、距離画像センサ100は、複数の分割光によって対象物上に形成される複数の投光スポットで画定される複数の線分のx軸に対する傾きに基づいて、複数の投光スポットとの複数の距離を測定する(決定する)距離測定部(距離決定部)117とを備える。
(もっと読む)
測距装置及び撮像装置
【課題】装置構成の複雑化を招くことなく、測距用撮像素子から出力される画像信号に含まれている暗電流ノイズを除去できるようにした測距装置を提供する。
【解決手段】
3つの撮像素子のうちの中央に位置する暗電流検出用撮像素子22bに光が入射しないように、該暗電流検出用撮像素子22bの周囲を覆って遮光する遮光部材25と、両側の測距用撮像素子22a,22cの撮像領域22a1,22c1から出力される画像信号、及び暗電流検出用撮像素子22bの撮像領域22b1から出力される暗電流ノイズ画像信号を取り込み、取り込んだ各画像信号から暗電流ノイズ画像信号を減算して、各画像信号に含まれている暗電流ノイズを除去する暗電流ノイズ除去部27を有し、測距演算部28は、暗電流ノイズ除去部27で暗電流ノイズが除去された画像信号に基づいて被写体までの距離を算出する。
(もっと読む)
情報処理装置、情報処理方法、プログラム、及び電子装置
【課題】情報処理装置とユーザとの距離に拘らず、違和感なく情報処理装置を操作できるようにする。
【解決手段】肌領域検出部61は、画像上からユーザの肌を表す肌領域を検出し、特徴点抽出部62は、肌領域の特徴点を抽出し、距離算出部63は、肌領域に基づいて、ユーザまでの距離を算出し、座標変換部46は、距離に応じて、特徴点を所定の座標空間上の座標点に変換するための変換係数を決定し、決定した変換係数に基づいて、特徴点を所定の座標空間上の座標点に変換する。本発明は、例えば、撮像された画像から、ユーザの肌領域を検出する検出装置に適用できる。
(もっと読む)
3次元形状取得装置および3次元形状取得プログラム
【課題】複数の画像から高い精度で奥行き情報を生成する3次元形状取得装置および3次元形状取得プログラムを提供する。
【解決手段】3次元形状取得装置は、基準画像および参照画像からブロック画像を、それぞれ基準ブロック画像および参照ブロック画像として切り出すブロック画像切出手段と、基準ブロック画像における所定の色を基準色として特定し、基準ブロック画像および参照ブロック画像において、基準色に所定の範囲内で類似する色の画素を対象領域として抽出する対象領域抽出手段と、基準ブロック画像における所定の色を対象領域の背景をマスクする置換色として特定し、基準ブロック画像および参照ブロック画像において、対象領域に含まれない画素の色を置換色で置き換える色置換手段と、位相限定相関法により視差を計測する視差計測手段と、視差計測手段が計測した視差から3次元座標位置を生成する3次元座標位置生成手段とを備えることを特徴とする。
(もっと読む)
道路端検出装置、運転者支援装置、および道路端検出方法
【課題】自車両が走行する道路における端部の位置を検出する道路端検出装置において、精度よく道路端を検出できるような技術を提供する。
【解決手段】レーダ装置は、レーダ処理にて、個別領域を自車両の進行方向の左右方向に仮想的に多数並べて形成される検出対象領域の各個別領域に対してそれぞれ光波を照射し、この光波が被測定物に反射されることによる反射光を受光して、対物距離および反射強度をそれぞれ検出する(S110〜S140)。各個別領域のうちの隣接する個別領域で各対物距離の差が基準距離差以上となる第1境界と(S160)、各個別領域のうちの隣接する個別領域で各反射強度の差が基準強度差以上となる第2境界とを検出し(S170)、第1境界の位置または第2境界の位置を道路端として設定する(S180)。
(もっと読む)
物体検出装置および情報取得装置
【課題】コンパクトな構成にて、回折光学素子の劣化を検出可能な情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、波長830nm程度のレーザ光を出射するレーザ光源111と、偏光ビームスプリッタ(PBS)113と、1/4波長板114と、DOE116と、PD117を備えている。DOE116は、レーザ光を所定のドットパターンにて目標領域に照射する。PD117は、DOE116によって回折および反射されたレーザ光の一部を受光する。
(もっと読む)
ステレオカメラシステム及び該システムを備える車両
【課題】外部の物体を利用することなく、簡単な構成にて、画像データの位置補正処理を高精度にて行う、汎用性の高いステレオカメラシステム及び該システムを備える車両を提供する。
【解決手段】ステレオカメラシステム(100)は、第1カメラ(20a)、第2カメラ(20b)、及び、基台(30)からなるステレオカメラユニット(70)と、第1カメラ(20a)及び第2カメラ(20b)が出力する第1画像データ及び第2画像データの少なくとも一方に、位置補正処理を行う制御装置(40)とを備える。第1カメラ(20a)及び第2カメラ(20b)の視野に、ステレオカメラユニット(70)の一部がそれぞれ含まれ、制御装置(40)は、第1画像データ及び第2画像データに含まれるステレオカメラユニット(70)の一部の画像に対応するデータに基づいて位置補正処理を行う。
(もっと読む)
移動体検出装置
【課題】安定性に優れ精度の高い移動体検出が可能となる移動体検出装置を提供する。
【解決手段】移動体が移動する移動路の側部に設けられ、当該移動路を移動する移動体の側面までの距離を示す距離画像を取得する距離画像取得手段と、この距離画像取得手段により取得された距離画像から前記移動体の側面に対する特徴量を求める特徴計算手段と、この特徴計算手段により求められた特徴量に基づき、あらかじめ標準的な移動体から取得された基準の特徴量を参照することにより前記移動体を判別する移動体検出手段とを具備している。
(もっと読む)
距離変動計測装置
【課題】距離変動計測を行う前に光軸調整を行う機構を備えた距離変動計測装置を得る。
【解決手段】レーザ光による送信系−受信系間の距離変動計測装置であり、送信系が、基準となる変調信号を生成する変調信号発生器1d、変調信号に基づいてレーザ光を照射する光送信器1a−1c、光送信器のレーザ光のビーム方向を変更するビーム方向変更手段3,4、を含み、受信系が、送信系からのレーザ光を受光し受信信号を得る光受信器9a−9c、受信信号の位相検波を行い強度と位相を求める位相検波器9d、光受信器のレーザ光の受光視野を変更する受光視野変更手段11,12、位相検波器で求めた受信信号の強度が所定の閾値以上になるように受光視野変更手段11,12または通信機能により送信系のビーム方向変更手段3,4を制御して受光視野またはビーム方向の調整を行う光学的アライメント調整手段14,6を含む。
(もっと読む)
信号処理装置、及び走査式測距装置
【課題】走査式測距装置による測定情報を利用して、測定光の伝播方向と交差する方向に移動する移動体の速度を正確に算出することができる信号処理装置を提供する。
【解決手段】信号処理装置は、測定対象空間に向けて所定の走査周期Tで測定光を走査する走査式測距装置1から入力される単位走査毎の測定情報を記憶する記憶部と、記憶部に記憶された過去と現在の単位走査毎の測定情報を走査方向に相対的にシフトさせたときに、双方の測定情報の一致度が最大となるシフト量Sと走査周期とTから移動体の速度を算出する速度演算部と、速度演算部で算出された速度に基づいて前記移動体の状態情報を出力する出力部と、を備えている。
(もっと読む)
測距装置及び撮像装置
【課題】視差算出にかかる処理時間を考慮して視差算出に用いる画素を適切に選択する。
【解決手段】対象物までの距離を測定する測距装置であって、2つの撮像手段と、2つの撮像手段のうち一方の撮像手段により撮像された画像に対し、視差算出の対象画像のサイズに応じて、視差算出画素を選択するための複数の処理から1つを決定する決定手段と、決定手段により決定された処理に基づき、対象画像から視差算出画素を選択する選択手段と、選択手段により選択された視差算出画素と、他の撮像手段により撮像された画像のうち、選択された視差算出画素に対応する画素とを用いて視差データを算出する算出手段と、を備える。
(もっと読む)
測距装置及び撮像装置
【課題】視差算出にかかる処理時間を高速化すること。
【解決手段】対象物までの距離を測定する測距装置であって、2つの撮像手段と、2つの撮像手段により撮像されたそれぞれの画像を複数の小画像に分割する分割手段と、2つの撮像手段のうち一方の撮像手段により撮像された画像の小画像に対し、視差算出画素を選択するためのテクスチャ検出処理、選択された視差算出画素と、他の撮像手段により撮像された画像のうち、選択された視差算出画素に対応する画素とを用いて視差データを算出する視差算出処理を少なくとも行う視差算出手段と、視差算出手段によるテクスチャ検出処理、視差算出処理を小画像毎に並列して処理するよう制御する制御手段と、を備える。
(もっと読む)
カメラキャリブレーションシステムと、その計測車両及び路側機
【課題】走行する車両を撮影するカメラの条件を設定するカメラキャリブレーションを容易に設定可能なカメラキャリブレーションシステムと、その計測車両及び路側機を提供すること。
【解決手段】目印を搭載した計測車両を走行させ、この車両の目印を認識する画像処理部を有する路側機で構成されるカメラキャリブレーションシステムにおいて、上記計測車両は、搭載したGPS受信機で受信した位置情報及び時計情報を送信するデータ送信機を備え、上記路側機は、走行する計測車両を撮影するカメラ映像の中の目印を認識する画像処理部と、GPS受信機で受信した当該路側機の設置位置情報を原点とし、前記データ送信機から送信された時計情報及び位置情報、及び前記画像処理部が目印を認識したときの画像及び当該目印の座標を元に、目印の位置情報と、前記路側機の設置位置情報から当該2点間の距離を算出する。
(もっと読む)
ステレオ画像処理方法およびステレオ画像処理装置
【課題】 対象物と撮像装置との距離に応じて、高精度、高速に対象物の3次元情報を取得する。
【解決手段】 対象物を撮像する撮像装置と、同一の対象物を複数の方向から撮像した複数の高解像度画像を取得する画像取得部と、低解像度画像を生成する低解像度画像生成部と、基準画像上の点に対応する比較画像上の対応点を探索する対応点探索部と、対応点の探索結果に基づいて3次元情報を演算する3次元情報演算部と、低解像度画像に基づく3次元情報から高解像度画像における探索点の距離範囲を決定する距離範囲決定部と、距離範囲に基づいて高解像度画像における探索ウィンドウサイズを決定するウィンドウサイズ決定部と、距離範囲により定まる視差範囲に基づいて高解像度画像における前記対応点の探索範囲を限定する探索範囲限定部と、を備える。
(もっと読む)
撮像装置、撮影レンズおよび画像処理プログラム
【課題】特定の開口形状を有するマスクである構造化開口を撮影レンズに設けて撮影される撮影画像から距離情報を得るときに、高精度化を図るには開口位置を変えて2回以上の撮影を行うことが好ましい。しかし、同じ被写体に対して複数回の撮影を行う場合、画像間に生じる被写体の動き、撮影者の手振れなどに起因して、得られる距離情報が大きく劣化してしまう。
【解決手段】上記課題を解決するために、撮像装置は、光学系を介して入射する被写体光束を複数の波長帯に分離して検出する撮像素子と、光学系の光軸に交差して配設される構造化開口とを備え、構造化開口は、複数の波長帯のうちの一つである第1波長帯を透過または遮断する第1フィルタと、複数の波長帯のうちの一つであって第1波長帯とは異なる第2波長帯を透過または遮断する第2フィルタを、光学系の光軸に対してそれぞれ偏心した位置に設けられた第1開口および第2開口に有する。
(もっと読む)
距離測定装置
【目的】簡単な操作で測定対象物間の間隔や測定対象物の高さを測定できる距離測定装置を提供する。
【構成】レーザ光を出射する発光部20と、発光部20からの出射光をターゲット5に照射する対物レンズ14と、ターゲット5からの反射光を受光レンズ15を介して受光する受光部25と、受光部25で受光された反射光に基いてターゲット5までの距離を求める距離計算部41Aとを備えている距離測定装置1において、2つのターゲット5a,5bに対する視野角を設定する視野角設定部(回転リング31、回転位置検出ポテンショメータ32及び角度計算部33)を設けるとともに、この視野角設定部で設定された視野角と距離計算部41Aで求められた距離測定結果とに基いて2つのターゲット5a,5b間の距離を演算する間隔計算部41Bを設けた。
(もっと読む)
焦点検出装置およびその制御方法
【課題】 検出部を互いに位相がずれて並列に隣接している複数列のラインセンサとした位相差AF制御において、ラインセンサ間の像信号の類似性で像信号の合成を判別することが困難な場合がある。
【解決手段】 本発明では、互いに位相がずれて並列に隣接しているラインセンサが、同一の被写体光を受光していると判断される場合に、ラインセンサからの像信号を合成した後に像ずれ量を検出する。
(もっと読む)
101 - 120 / 572
[ Back to top ]