
Fターム[2H059CA02]の内容
Fターム[2H059CA02]に分類される特許
1 - 9 / 9
画像校正システム、画像校正方法及び撮像システム
【課題】外部の計測装置を用いずに、複数の撮像装置のずれ角を検出しそれぞれの画像のずれを校正する。
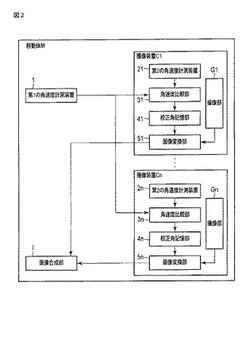
【解決手段】複数の撮像装置Ciが搭載された移動体Mを回転させ、第1の角速度計測装置1により移動体Mの角速度を計測し、第2の角速度計測装置2により撮像装置Ciの角速度を計測し、角速度比較部3iにより移動体Mの角速度と撮像装置Ciの角速度とを比較して各撮像装置Ciのずれ角を算出し、算出したずれ角を画像の校正角として校正角記憶部4iに記憶し、撮像部Giで取得した画像を校正角記憶部4に記憶された校正角で回転させて、画像変換部5iで複数の撮像装置Ciそれぞれで取得した画像のずれを校正する。
(もっと読む)
撮像装置

【課題】小さな視線走査光学素子を用いることが可能であり、視線走査光学素子によるモーメント変動を抑制し、撮像装置の姿勢を安定させることで高分解撮像ができる撮像装置を提供する。
【解決手段】被写体からの入射光を検出する検出器5と、入射光の焦点を検出器5上の位置に合わせる光学系(2,3)と、光学系(2,3)の射出瞳側に配置され、撮像装置1の移動に起因する入射光の焦点の位置の移動を修正する視線走査光学素子4とを備える。
(もっと読む)
カメラスタビライザ
【課題】ズーム操作時に一定の駆動速度を維持する際の操作を容易とする。
【解決手段】カメラを回転させるジンバル機構12と、カメラのズーム状態を検出し、ズーム検出値を出力するズーム検出手段21と、ズーム指示値変換手段22と、入力操作手段14と、入力操作手段14より入力される入力値に、ズーム指示値に反比例する利得を掛算して駆動速度を求め、その駆動速度によってジンバル機構12を駆動制御する駆動制御手段23とを備える。ズーム指示値変換手段22は、一定ズームイン操作時に最小値から最大値に向って変化するズーム検出値の最小値・最大値間を線形補間して得たズーム指示値を、各時間におけるズーム検出値と対応付けた変換テーブルを有し、その変換テーブルを参照してズーム検出値をズーム指示値に変換する。
(もっと読む)
カメラスタビライザ
【課題】操作性に優れたカメラスタビライザを提供する。
【解決手段】ズーム倍率Zinについての広義単調減少関数g(Zin)に検出されたズーム倍率Zinを入力した場合の出力値をカメラの回転指令woutとして、その回転指令woutで上記カメラを回転させる。ここで、ズーム倍率Zinのテレ端において、ズーム倍率Zinの変化に対する広義単調減少関数g(Zin)の出力値の変化の割合は0に収束している。このため、ズーム倍率Zinを徐々に上げて行き、ズーム倍率Zinがテレ端に達して、ズーム倍率Zinの変化が止まる場合であっても、回転指令woutの変化は徐々に0に近づき、急には0にならない。したがって、テレ端において対象物をカメラの画面に捕らえるのが従来よりも容易になる。
(もっと読む)
撮像装置及び撮像装置における視軸整合方法
【課題】少なくとも可視光学系と赤外線光学系を含む複数の光学系で撮像を行う撮像装置において、赤外線光学系の保守工数を低減する。
【解決手段】複数の赤外線光学系撮像ユニット50,100が光学フレーム105に搭載され、各撮像ユニット50,100は、光学レンズ系101.107、撮像センサ104,119を備えたセンサモジュール102,108及びセンサモジュール102,108を光学フレーム105に搭載するベース機構110,111を備えた撮像装置150において、センサモジュール102,108の撮像センサ104,119の3次元方向の位置を予め調整しておき、センサモジュール102,108の保守交換時には新たなセンサモジュール102,108をベース機構110,111に搭載して視軸方向の回転調整のみを行えば良いようにした。
(もっと読む)
複数の光学系及び検出器アレイを備えた大判デジタルカメラ
大判デジタルカメラは、パンクロマティック画像データを収集するように構成された一次的なカメラシステム及びカラー画像データを収集するように構成された二次的なカメラシステムを有する。二次的なカメラシステムは一次的なカメラシステムの光学系よりも長い焦点距離を有する光学系を有する。二次的なカメラシステムの解像度は一次的なカメラシステムの解像度よりも高い。一次的なカメラ・システムによって生成される画像のフットプリントは二次的なカメラシステムによって生成される画像のフットプリントよりもサイズが大きい。一次的なカメラシステムによって生成された画像は、写真測量、三角測量によって画像ベースのジオリファレンスを実行するための情報を提供する。二次的なカメラシステムによって生成された画像はオルソ画像の生成における使用に適した高解像度の狭角カラー画像を提供する。  (もっと読む)
(もっと読む)
複数の検出器アレイを備えた多重解像度デジタル大判カメラ
大判デジタルカメラは、パンクロマティック画像データを収集するように構成された一次的なカメラシステム及びカラー画像データを収集するように構成された2つ以上の二次的なカメラシステムを有する。二次的なカメラシステムの各々は一次的なカメラシステムの光学系よりも長い焦点距離を有する光学系を有する。二次的なカメラシステムの各々の解像度は一次的なカメラシステムの解像度よりも高い。一次的なカメラシステムによって生成される画像のフットプリントは二次的なカメラシステムによって生成される画像のフットプリントよりもサイズが大きい。一次的なカメラシステムによって生成された画像は、写真測量、三角測量によって画像ベースのジオリファレンスを実行するための情報を提供する。二次的なカメラシステムによって生成された画像はオルソ画像の生成における使用に適した高解像度の狭角カラー画像を提供する。  (もっと読む)
(もっと読む)
縦に繋がれたカメラ及び/又は距離測定特徴を含んでいる大領域画像を詳細にとらえるシステム及び方法
システム及び方法は、大領域物体又は大領域に関する画像の獲得に関係して開示されている。1つの例示的な実施形態においては、1つ又はそれ以上の第1画像獲得装置を含む第1システムを介して、第1領域を描いている概観画像を得る又は獲得するとともに、複数の画像獲得装置を含む第2システムを介して、画像軸に沿って互いに関係しているが如く特徴付けられている詳細画像を得る又は獲得する、方法が提供されている。さらには、詳細画像は第1領域の部分集合である第2領域を描いて良く、それらは画像軸に対し平行な片に配置されて良く、そしてそれらは第1領域の対応している部分より高解像を有して良い。 (もっと読む)
統合された複数の撮像装置
【課題】第一撮像装置(415)と、第二撮像装置(420)とを備えている撮像システムを提供する。
【解決手段】前記第一撮像装置(415)は第一光路から第一画像をとらえるようになっていて、第一光学素子(425,430)と第一ハウジングとを備えており;前記第二撮像装置は第二光路からの第二画像をとらえるようになっていて、第二光路は前記第一光路と平行ではなくて交差しており、前記第二撮像装置は第二光学素子(435,440)と第二ハウジングとを備えている。
(もっと読む)
1 - 9 / 9
[ Back to top ]