
Fターム[2H105AA11]の内容
カメラの付属品 (5,167) | カメラの支持、保持、固定 (2,551) | カメラを取り付けるためのもの (1,938) | カメラの取り付け、固定、保持 (1,490) | 動力の使用 (381)
Fターム[2H105AA11]の下位に属するFターム
リモートコントロール (173)
連続的に対象を追尾するもの (26)
特定の情報を検知することによる回動 (95)
Fターム[2H105AA11]に分類される特許
81 - 87 / 87
防振装置および変位検出装置

【課題】 機体に取り付けられた機器が受ける振動を緩衝させる防振装置に関し、能動的に、より広い周波数領域の振動を抑制させる。
【解決手段】 第1の部材20の内部に第1の部材20に対して変位可能に第2の部材31、41が設けられ第1の部材20から第2の部材31、41にかかる振動を緩衝する防振装置1において、緩衝手段30、40が第1の部材20に対する第2の部材31、41の振動を吸収する。複数の1次元変位センサ44が互いに非平行に第1の部材20と第2の部材31、41との間に取り付けられ第1の部材20に対する第2の部材31、41の変位に応じた1次元変位量を出力する。算出手段が1次元変位センサ44の出力に基づいて第1の部材20に対する第2の部材31、41の変位を算出する。駆動手段81が算出手段によって算出された第2の部材の変位に基づいてその変位量を減少させる方向に第1の部材20あるいは第2の部材31、41を駆動する。
(もっと読む)
旋回雲台システム

【課題】専用の電源供給線や制御回路を設けることなく自動反転機能を実現でき、信頼性を向上しコストを低減できる旋回雲台システムを提供すること。
【解決手段】カメラが取り付けられた旋回雲台の駆動方向を反転可能な旋回雲台システムであって、旋回台45を駆動するACモーター47と、旋回台45を正方向に駆動させる電力及び旋回台45を負方向に駆動させる電力のいずれかをACモーター47に供給する雲台電力制御ユニット50と、ACモーター47の駆動状態に基づいて雲台電力制御ユニット50を制御する制御部52とを備え、制御部52は、ACモーター47が停止した場合、その駆動方向を反転させるよう雲台電力制御ユニット50を制御する。
(もっと読む)
ステッピングモータのマイクロステップ駆動装置、電動雲台カメラおよびズームカメラ
【課題】二つのステッピングモータを同時に駆動するに際して、マイクロステップ駆動時の最大消費電流を低減すると共に、最大消費電流と最小消費電流の差を低減してEMIノイズの発生を抑える。
【解決手段】二つのステッピングモータ1,2のステップレートが等しく、かつ、一方のステッピングモータのマイクロステップ電流波形の位相90°n相(nは整数)と他方のステッピングモータのマイクロステップ電流波形の位相−45°+90°m相(mは整数)が一致するように、それぞれが別個の機構部を動作させる二つのステッピングモータを同時にマイクロステップ駆動(18,5,6)させる。
(もっと読む)
力覚付与型入力装置
【課題】 小型化が可能で安価なカメラ機能付き力覚付与型入力装置を提供すること。
【解決手段】 操作者が手動により操作可能な操作レバー2と、この操作レバー2に一体化されたカメラモジュール3と、操作レバー2に外力を与える第1および第2のリニアモータ4,5と、操作レバー2の変位を検出する位置センサ6,7と、車載機16と、携帯機17と、位置センサ6,7の出力信号に基づいて各リニアモータ4,5の駆動を制御可能な制御回路部18とを備え、操作レバー2の手動操作による入力モードと、カメラモジュール3により撮影するカメラモードとの2つのモードで動作が可能であると共に、車載機16が携帯機17を認識しているときには入力モードに切り換わり、車載機16が携帯機17を認識していないときにはカメラモードに切り換わるように構成した。
(もっと読む)
重量補償装置を備えた台架ヘッド
ステータ(100)と該ステータ(100)に対して傾倒軸線(N)を中心として回動可能に支承されたロータ(20)とを備えた台架ヘッド(2)は、傾倒運動に際して発生する重量モーメントを補償するための補償装置を有しており、該補償装置はエネルギ蓄積デバイス(7)を有しており、該エネルギ蓄積デバイスは傾倒運動に際してロータ(20)に戻しモーメントを加えるようになっている。補償装置は、さらに、付加装置(30,21,31)を有しており、該付加装置は、ロータ(20)からエネルギ蓄積デバイス(7)への回動運動の伝達と、ひいてはさらに、エネルギ蓄積デバイス(7)によってロータ(20)に加えられる戻しモーメントとに、影響を与えるようになっている。  (もっと読む)
(もっと読む)
自動フレーミングカメラ
【課題】 コンパクトかつ正確なフレーミングが可能な自動フレーミングカメラを提供する。
【解決手段】 第3フレーム9の正面側に撮影レンズ3の両側に発光素子5及び受光素子6が固定されている。発光素子5、撮影レンズ3及び受光素子6は、略水平方向に直線状に配設されている。発光素子5と受光素子6とは、アクティブ方式の測距ユニットを構成している。発光素子5及び受光素子6の筒胴外周側面からは、第3フレームに固定された全ての部材に対して奥行き方向での重心位置にあたる位置に第3フレーム9を第2フレーム8に対してチルト方向に回動可能に支持するチルト方向支持軸11が突設されている。スペース効率が良く、測距精度が高い。
(もっと読む)
ビーム、ハンドル及び前端アセンブリを備えた操作者援助遠隔操作カメラ位置決め及び制御システム
一人の操作者が手の届かない位置にあるカメラを使用及び支持することを許容する遠隔操作カメラ位置決め及び制御システムが開示される。この遠隔操作カメラ位置決め及び制御システムの様々な特徴が開示される。位置決め装置は一個以上のビームモジュールを含み、ビームモジュールは、例えば補強縦通材、固定筋交及び比較的低密度な安定化ウェブを使用することにより、(複数の)ビームモジュールの全長に沿って変化する断面曲げ剛性を有する。カメラは前端アセンブリによりビームモジュールに取り付けられ得、前端アセンブリは可能な限り大きな動作範囲に亘り、カメラ及び前端アセンブリの質量中心をビームモジュールの中立軸に沿って配置するように構成される。システムはまたハンドルモジュールと、ジョイスティック等のカメラ制御装置を包囲する制御装置籠を含む。ハンドルモジュールは例えば軸方向及び回転方向に移動可能なグリップと末端ハンドルグリップリングとを組み入れる。監視装置、ビデオレコーダ、バッテリパック等の補助サブシステムは任意で、ベスト等の支持衣服を使用して操作者により着用され得る。 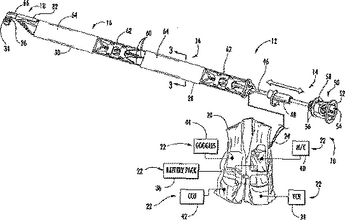 (もっと読む)
(もっと読む)
81 - 87 / 87
[ Back to top ]