
Fターム[3B150AA16]の内容
Fターム[3B150AA16]に分類される特許
1 - 20 / 89
テープ送り出し装置、及びテープ縫い付け装置
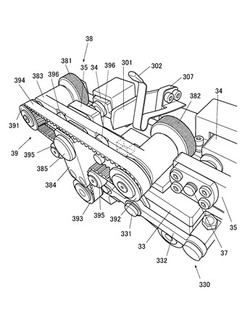
【課題】1つのモータで2つのローラを駆動してテープを送り出せるようにして、テープの伸びを少なくできるとともに、2つのローラ間にメスを配置できて、テープの排出も容易にする。
【解決手段】テープを送り出す装置であって、1つのモータと、テープの送り出し方向に間隔を開けて配置され、テープTに圧接してテープTを送る2つのローラ381・382と、2つのローラ381・382の回転軸をそれぞれ回転自在に保持するホルダ383と、ホルダ383を挟んで2つのローラ381・382と反対側において1つのモータの駆動軸の回転動力を2つの回転軸に伝達する動力伝達機構39と、ホルダ383を、2つのローラ381・382の間を支点として揺動させ、2つのローラ381・382の一方のみを選択的にテープTに圧接させるローラ切り替え機構330と、を備える。
(もっと読む)
テープ送り出し装置、及びテープ縫い付け装置

【課題】テープ継目部分の排出のための専用手段を不要にし、且つテープ継目部分を指で排出しやすくする。
【解決手段】テープを送り出す装置であって、テープの送り出し方向に間隔を開けて配置され、テープに圧接してテープを送る2つのローラ381・382と、その2つのローラ381・382に対しテープの送り出し方向の上流側に配置され、テープの継目TGを検出するテープ継目センサ303と、2つのローラ381・382に対しテープの送り出し方向の下流側に配置され、テープの有無を検出するテープセンサ305と、を備える。さらに、2つのローラ381・382の間に配置され、テープを切断するメス301を備える。
(もっと読む)
テープ縫い付け方法及び装置
【課題】靴の身頃にテープを縫い付ける場合において、特別な押えを不要にして、コストを安くする。
【解決手段】靴の身頃LI(RO)にテープTを縫い付ける方法であって、
身頃LI(RO)に、縫い始め少なくとも3針以上の縫い目を形成してから、テープの縫い始め予定位置を針下まで供給して、身頃上のテープに、通常の縫いピッチよりも小ピッチで2針以上の縫い目を形成してから、前記通常の縫いピッチで身頃にテープを縫い付けることを特徴とする。
(もっと読む)
ミシン
【課題】ヒッチステッチを防止する。
【解決手段】針棒12を上下動軸心周りに回動させる針棒回動機構30と、針板の下側で糸寄せ部材51により下糸の糸寄せを行う糸寄せ機構50と、被縫製物を水平面に沿って任意の移動方向に移動させて任意の位置に針落ちを行わせる布移動機構80と、縫製データに基づいて布移動機構を制御する制御部90とを備え、当該制御部は、前記移動機構による各針落ちごとの前記被縫製物の移動方向が予め定められた第一の角度範囲である場合には糸寄せ機構による糸寄せを実行し、移動方向が予め定められた第二の角度範囲である場合には針棒回動機構による針棒の回動を実行する。
(もっと読む)
ミシン
【課題】ミシンの所定の給脂箇所に給脂が必要な時期が近づいたこと、あるいは、給脂が必要な時期となったことを、使用者に精度よく知らせる。
【解決手段】上下動する縫針を有し布地を縫製するための駆動機構を備えたミシンにおいて、布地の移動量を積算するステップSS140の手順と、模様縫いミシン1の給脂箇所である2対のスライドベアリング51,60に対する給脂に関する報知を行う表示部7aと、ステップSS140の手順が積算した移動量に応じて、表示部7aの制御を行う処理とを有する。
(もっと読む)
ベルトループ付けミシン及びベルトループの折り返し方法
【課題】ベルトループを適正に縫着することができるベルトループ付けミシン及びベルトループの折り返し方法を実現する。
【解決手段】ベルトループBの中央側へ折り返す端部(一端部b1、他端部b2)がその中央側からはみ出すことが想定される場合に、その一端側が固定されたベルトループBを挟持したループクランプ31を、ベルトループBの長手方向と交差する方向であって、そのはみ出しを打ち消す方向に所定量移動させた後に、フォーク部材38でベルトループBの端部を折り返すようにすることで、その端部をベルトループBの中央側に折り重ねることが可能になって、ドッグイヤーの発生を抑えることを可能にした。
(もっと読む)
ミシン用ステッピングモータ制御装置及びミシン
【課題】ミシンに使用されるステッピングモータの消費電力を低減すること。
【解決手段】ミシン用ステッピングモータ制御装置1は、偏差生成部40と、駆動信号生成部41と、ゲイン調整部43と、を含む。偏差生成部40は、ステッピングモータ30に対する電流指令値Icとステッピングモータ30に流れる駆動電流値Idとの偏差dを求め、偏差dに所定のゲインGを与えた電流値偏差Dを生成する。駆動信号生成部41は、電流値偏差Dから駆動信号Sdを生成する。コイル34a、34bの自己誘導によって流れる電流をコイル34a、34b自体に還流するように駆動回路が制御される省電力制御が行われる場合において、駆動電流値Idの絶対値を減少させる必要があるときには、駆動電流値Idの絶対値を減少させる必要がないときよりもゲインGを大きくする。
(もっと読む)
ミシン及びミシンの制御方法
【課題】縫製作業を開始することなく上糸に付加する張力の確認を行うことができるミシン及びミシンの制御装置を提供する。
【解決手段】CPUは、足踏みペダルの位置が踏み返し位置(Pb1)以上踏み返された位置である駆動領域に属するか否かを判断する(S90)。踏み返し位置(Pb1)は、縫製動作のために作業者が足踏みペダルを中立位置(Pn)から踏み込み位置(Pf2)へ操作する方向と異なる方向に設けた位置である。駆動領域に属する場合、CPUは、布押え部材の押え位置への移動を禁止し(S170)、糸調子ソレノイドをONにして上糸に張力を付加する(S180)。作業者は、上糸張力を確認することができる。
(もっと読む)
ミシンのボビン交換装置
【課題】ボビン交換操作に際して適切な誤動作対策を講じた、あるいは確実なボビンケースの受け渡しを可能にする。
【解決手段】ボビン把持装置が把持しているボビンケースをボビンストック部の所定のボビン交換位置のボビン保持部に渡すとき、検出手段により該所定のボビン交換位置のボビン保持部にボビンが保持されていることを検出したならば、搬送機構によるボビン把持装置のボビンストック部に向けての移動を中止させる、他方、ボビンストック部の所定のボビン交換位置のボビン保持部にボビン把持装置がボビンケースを取りに行くとき、検出手段により該所定のボビン交換位置のボビン保持部にボビンが保持されていないことを検出したならば、搬送機構によるボビン把持装置のボビンストック部に向けての移動を中止させる。
(もっと読む)
ミシン
【課題】縫製パターンが既知である場合に対応する縫製パターンを速やかに検索する。
【解決手段】針棒を上下動させる針上下機構と、複数の縫製パターンを記憶する記憶手段と、縫製パターンの縫製点データに従い保持枠を移動させる保持枠制御手段と、保持枠が移動させてパターン特定点を入力する位置入力手段と、入力されたパターン特定点と一致若しくは近似する縫製点データを有する縫製パターンを記憶手段から検索するデータ検索手段とを備えている。
(もっと読む)
ボタン付け方法及びボタン付けミシン
【課題】一台のミシンを用いてボタン付け工程と根巻き縫い工程とを行えるのはもとより、人手を要することなく、両工程を連続的に行えて作業性及び作業効率を向上できるボタン付け方法及びボタン付けミシンの提供。
【解決手段】表ボタンB、力ボタンP及び生地Wの載置板6上へのセット工程、両ボタンを独立的に移動させながら両ボタンを生地Wに同時に縫い付けるボタン付け工程、縫い糸ホルダー7をボタン縫い糸N1に係合させて表ボタンB及び生地Wを保持させる縫い付けボタン保持工程、両ボタンホルダーの載置板6上から離間位置への移動工程、両ボタンが垂直又は略垂直姿勢となるよう反転させるボタン反転工程、反転で下方へ垂れ下がった生地端部Weを折り込む工程、ボタン縫い糸N1の周りに根巻き糸を巻き付け縫いする根巻き縫い工程、両ボタンが水平又は略水平姿勢になるよう両ホルダーを逆方向に戻し反転させる戻し反転工程を、順次連続的に行う。
(もっと読む)
ミシン
【課題】糸切断後の加工布から延びる糸端部の長さを一定にする糸切り機構を提供する。
【解決手段】CPUは、縫製開始か否かを判定し、縫製開始の場合(S1;Yes)、電流値i1の微弱な駆動電流で糸切り用ソレノイドを駆動して(S2)、可動刃を待機位置に保持する。次に、CPUは、実行中の縫製データに基づいて、糸切り指令が入力されたか否かを判定し、糸切り指令が入力された場合(S3;Yes)、糸切り用ソレノイドを待機状態から駆動停止状態に切換える(S4)。
(もっと読む)
ミシン
【課題】上糸保持動作の動作中に主軸の回転速度が急激に変化すると上糸保持装置の上糸の端部の保持量が変化する。
【解決手段】S10において、主軸回転角度AがA3と等しい場合(S10;Yes)、制御装置は、速度変更フラグF1を1にし(S16)、上糸保持用パルスモータの回転角度BがB0と等しいか否かを判定する(S17)。上糸保持用パルスモータの回転角度BがB0と等しい場合(S17;Yes)、制御装置は、ミシンモータの回転速度の変更を禁止する。それ故、主軸は現在の回転速度を維持したままS12へ移行する。一方、上糸保持用パルスモータの回転角度BとB0とが等しくない場合は、(S17;No)、制御装置は、設定値に示す主軸の回転速度になるように、ミシンモータの回転速度を変更することで主軸の回転速度を変更する。
(もっと読む)
ミシン、ミシンの縫製データ編集装置及びミシンの縫製データ編集プログラム
【課題】縫製データの編集時により適切な空送りの針位置の入力を可能とする。
【解決手段】複数の針位置が記録された縫製データに従って、被縫製物に対して縫製パターン通りの縫製を行うミシンMの縫製データ編集装置20において、針位置を入力する入力手段21と、縫い針と保持枠との相対移動が可能な作業領域内を、針落ちを伴う縫いが可能な縫製可能エリアA1と、空送りが可能な空送りエリアと、縫いと空送りの双方ができない排除エリアとに分類する領域分布情報25bを記憶する記憶手段25と、入力手段から入力される針位置が作業領域内の各エリアのいずれに位置するかを提示する提示手段22とを備えている。
(もっと読む)
ミシン
【課題】縫製中でも自在に糸張力を補正する。
【解決手段】縫い針を上下動させる針上下動機構と、縫い針に対して被縫製物を相対的に位置決めする位置決め機構と、糸張力を縫い糸に付与する糸調子装置と、縫製データに基づいて位置決め、糸張力付与及び縫製速度の制御を行う動作制御手段1000とを備え、縫製データ71aに基づく縫製の実行中に当該データに定められた糸張力に対して縫製パターンの全針に及ぶ補正データの入力を受け付ける糸張力補正手段74を備え、動作制御手段は、糸切りを伴うことなく、入力直後の縫い目から補正データに応じた糸張力で縫製を行うことを特徴とする。
(もっと読む)
ミシン及び治具
【課題】駆動ギヤと下軸ギヤとの間のバックラッシの調整が容易で、且つ、下軸駆動機構に供給する潤滑油がベッド部内に飛散することを回避したミシン、及び当該ミシンの駆動ギヤと下軸ギヤとの間のバックラッシの調整する治具を提供すること。
【解決手段】下軸駆動機構を備えたミシン1において、駆動ギヤの回転軸の少なくとも一部を収容するとともに、駆動ギヤの回転軸に対して偏心した外周面261を有する偏心部材26と、駆動ギヤと下軸ギヤと潤滑油とを収容するとともに、偏心部材26の外周面261と全周にわたって当接し、偏心部材26を回転可能に支持する貫通穴を有するギヤケース40とを設ける。駆動ギヤの回転軸と、クランクロッド31とを連結する連結部を、偏心部材26からみて駆動ギヤとは反対側に設ける。
(もっと読む)
ボタン付けミシンのボタンホルダ装置
【課題】一種類のボタンホルダセットを複数種類のボタンのホルダに兼用使用可能として部品点数の削減によるコストダウン及び部品の紛失や損傷のおそれの解消が図れ、しかも、いかなる種類のボタンを縫い付け対象とする場合も、脱落や傾きなく確実かつ安定よく挟み保持させることができるボタン付けミシンのボタンホルダ装置を提供する。
【解決手段】駆動機構を介して互いに反対方向に同量かつ同速に往復駆動スライドされる左右一対のボタンホルダ10L,10Rの先端部位に取り付けられる一対のボタン挟み部材11L,11Rに、ホルダスライド方向に位置調整可能な軸様部材20L,20Rを連設するとともに、これら軸様部材20L,20Rの外周面で、複数種類のボタン径に対応する軸線方向の複数個所に、ねじ具21L,21Rによる締付け固定用の凹溝などのゲージ部22L,22Rを形成することによって、複数種類のボタンを挟み保持及び挟み保持解除できるように構成されている。
(もっと読む)
ミシン及び糸張力設定プログラム
【課題】加工布における実際の針落ち点を作業者が容易に認識しながら糸張力を設定することができるミシン及び糸張力設定プログラムを提供する。
【解決手段】作業者は、縫製パターンのうち、糸張力値の設定又は変更を行う任意の指定位置を、操作パネルを操作することで指定する(S22、S25:YES)。作業者が指定位置を指定すると、ミシンは、針棒の下端部に装着する縫針が挿通する針落ち地点に指定位置を位置させるように、加工布を保持している布押え装置の送り板を移送する(S32)。作業者は、針落ち地点に位置している指定位置を実際に視認しながら、糸調子装置が付与する糸張力の値を設定又は変更する。
(もっと読む)
ミシンの縫いデータ作成装置
【課題】針落ち点の数や位置が変更されても、縫製パラメータの設定を容易に行うこと。
【解決手段】入力手段10と、第1針落ち点データ作成手段1と、第1パラメータ付加手段1と、記憶手段5と、を備えたミシンの縫いデータ作成装置100において、縫い形状の変更を入力する変更入力手段10と、複数の第1形状点データを編集する形状点データ編集手段1と、複数の第2針落ち点データを作成する第2針落ち点データ作成手段1と、付加針落ち点データを抽出する抽出手段1と、付加針落ち点データの直前及び直後の第1形状点データを抽出し、この二点の第1形状点データに対する付加針落ち点データの位置を求める位置算出手段1と、複数の第2針落ち点データの中から位置算出手段により算出された付加針落ち点データの位置に最も近い第2針落ち点データを特定し、その特定した特定針落ち点データに縫製パラメータを付加する第2パラメータ付加手段と、を備える。
(もっと読む)
ミシン
【課題】薄い被縫製物の厚さを検出する。
【解決手段】主軸角度検出手段2bと、中押さえ29と、中押さえ上下動機構M1と、中押さえモータ42により中押さえ上下動機構とは別に中押さえを上下移動させる中押さえ高さ調節機構M4と、中押さえモータの軸角度検出手段81と、中押さえの下降時に被縫製物への当接により中押さえモータの出力軸に外部トルクが加わると中押さえを上方移動させるように中押さえモータに対して高さ可変制御を行う中押さえ高さ制御手段72と、中押さえの下死点における中押さえモータの検出軸角度から被縫製物の厚さを求める厚さ取得処理手段72とを備え、中押さえ高さ制御手段は、高さ可変制御の前に、中押さえが下死点となる時の中押さえ高さが針板上面よりも下方となるように前記中押さえモータを制御する。
(もっと読む)
1 - 20 / 89
[ Back to top ]