
Fターム[3B151BA03]の内容
Fターム[3B151BA03]に分類される特許
1 - 6 / 6
コーマにおけるラップ供給制御装置及びラップ供給制御方法
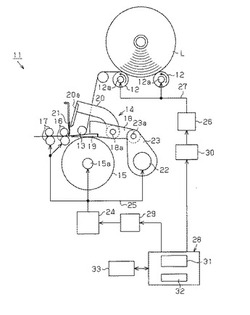
【課題】コーマがラップ重量測定装置や紡出重量測定装置を装備しなくても、ラップロール径に起因した紡出スライバ重量変化を効果的に補正し、紡出スライバの重量の均一化あるいは重量変化の抑制を図る。
【解決手段】ラップ供給装置はコーミングヘッド11のコーミング駆動部と独立して駆動可能なラップローラ用モータ26によって駆動される。ラップ供給制御装置は、試験紡出時の紡出スライバ重量の測定結果からラップローラ用モータ26の変速パターンを演算するCPU31と、CPU31により演算された変速パターンに基づきラップローラ用モータ26を制御するCPU31とを備えている。
(もっと読む)
全鋼製針布のための実装装置

【課題】プロファイル・ワイヤが装着されているときに有効な、改良された力の測定を特徴とする実装装置を提供する
【解決手段】実装装置1の実装アーム4は案内装置11に保持されるとともに、案内装置の案内方向は装着するドラム3の回転軸と平行している。作用力測定装置がプロファイル・ワイヤ9の引張力を検出するために設けられ、作用力測定装置は実装アームに作用する全体の力を少なくともワイヤの長さ方向で検出する。この際、プロファイル・ワイヤに作用している基本的にすべての力、すなわちブレーキ装置の制動力、同様に他の装置、例えば、アライメント装置、チルト装置等の制動力が検出される。
(もっと読む)
繊維束をコーミングのために繊維分類もしくは繊維選択する装置
【課題】簡素で生産性を増大し得ると共に優れたコーミング済みスライバを実現し得る装置を提供すること。
【解決手段】供給された織物繊維から成る繊維束をコーミングのために繊維分類もしくは繊維選択する装置が、供給手段(8;10、11)の下流に繊維束(16;301〜303)に対する挟持デバイス(18、19、20;21、22、23)を備え、回転可能に取付けられた少なくとも2つのローラ(12;13)が配置され、挟持デバイスは、各ローラの周縁部の領域において離間されて分布されており、測定された値を処理し得る制御/調整デバイス(42)であって夫々の場合に少なくとも1つの機能を実施すべく接続された要素(30;43〜47;49)に対して電気信号を発し得る制御/調整デバイス(42)には、機械関連値および繊維関連の技術的な値を検出するための測定対象値センサ(29、31、32;34、34a、34b;41)が接続される。
(もっと読む)
回転シリンダまたはカード用フラット上に配設された繊維処理針布を研磨するフラット・カードまたはローラ・カード上の装置
【課題】送り込みの間および研磨の間において少なくとも一個の研磨要素と繊維処理針布との間の接触(研磨強度)を確実に検出かつ監視する。
【解決手段】回転ローラまたはカード用フラット上に配置された繊維処理針布を研磨するフラット・カードまたはローラ・カード上の装置であって、少なくとも一個の研磨要素と、該研磨要素を上記針布に当接して位置決めする役割を果たす送り込みデバイスとを備える研磨機器を有する装置において、送り込み度合いおよび研磨強度が検出可能である。特に送り込みの間および研磨の間において少なくとも一個の研磨要素と繊維処理針布との間の接触(研磨強度)を確実に検出かつ監視し得るために、上記研磨機器に対しては高感度の構造物音センサが組み合わされ、且つ、電子的評価器は構造物音から、上記少なくとも一個の研磨要素と上記繊維処理針布との間における接触の強度を決定し得る。
(もっと読む)
テキスタイル繊維綿から綿巻体を形成するための装置
綿巻体を特にコーミング機のために形成するための巻取り装置のプレス圧を制御するための構成的及び製作技術的な費用を減じるためには、巻取り装置1の巻取りローラ2,3の回転数制御装置10から巻綿の巻上げられた綿長さのための長さ信号を導き出し、巻綿体の内々の長さ区分を経験的に内々のプレス圧に対応させることが提案された。 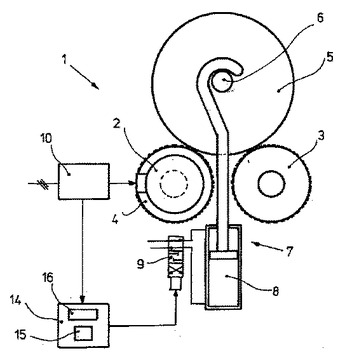 (もっと読む)
(もっと読む)
回転位置駆動装置を有する櫛機械
本発明は、円形の櫛を有する櫛機械に関する。このような櫛機械の作動機構を設定できるかまたはそれらの設定をチェックできるようにするために、櫛機械またはその円形の櫛(2)を所定の回転角位置に移動させることができる装置が設けられている。この装置は、回転位置センサ(9)、目標とする回転角位置を入力するための選択装置(11)、選択装置の回転角目標位置と回転位置センサの回転角実際位置とを比較するための比較装置(10)、および櫛機械の駆動装置を作動させるための制御装置(14)からなる。比較装置(10)は、2つの値に差があった場合、その差を低減するための設定指示を櫛機械の駆動モータ8に与える。  (もっと読む)
(もっと読む)
1 - 6 / 6
[ Back to top ]