
Fターム[3C007AS30]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 高温/低温環境用 (7)
Fターム[3C007AS30]に分類される特許
1 - 7 / 7
ロボットアーム
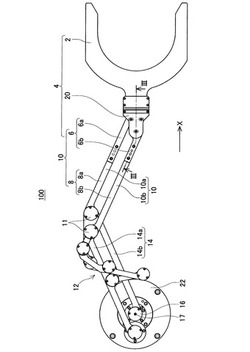
【課題】トランスファーチャンバ内の汚染を抑制することができるロボットアームを提供する。
【解決手段】ロボットアーム100は、半導体ウエハを搬送するロボットアームであり、ハンド2と前腕リンク10と上腕リンク14を備えている。ハンド2は、第1関節20を介して前腕リンク10に連結している。上腕リンク14は、第2関節11を介して前腕リンク10に連結している。ロボットアーム100では、前腕リンク10が、第1関節20と第2関節11の間で分割可能に構成されている。
(もっと読む)
基板搬送用ロボットアームのフォーク構造

【課題】基板搬送用ロボットのハンド部のフォークに対して要求される耐熱性要求、剛性要求、軽量化要求を満たすと共に、長尺化要求をも満たすフォーク構造を提供する。
【解決手段】基板に薄膜処理を施す際に使用する基板を搬送するロボットのハンド部に使用されるフォーク構造において、幅方向に複数枚の板状部材11,12,13を連ね、当該連ねられた複数枚の板状部材を長手方向に複数段継ないだ梁状構造物をなし、当該連ねられた複数枚の板状部材を長手方向に継ぐ位置において、基端側の複数枚の板状部材と先端側の複数枚の板状部材が互い違いに重なり合っており、当該複数の板状部材が互い違いに重なり合っている部位の少なくとも2箇所において、複数個のボルト・ナット51a等による機械的な締結部品や凹凸面の嵌合によるせん断荷重伝達手段51を設けた構成のフォーク構造とした。
(もっと読む)
水平多関節ロボット
【課題】水平多関節ロボットにおいて、高温基板搬送時の熱影響によるアームの姿勢変化を最小限に抑え、高精度な搬送を維持できるようにする。
【解決手段】ベルト111の張力を調整可能なテンション調整機構を有する水平多関節ロボットにおいて、テンション調整機構が、ベルト111に接触して張力を与えるアイドラ131と、アイドラ131を支持するとともにアームに対して第1支点119で回転可能に設けられたリンク118と、アームに対して第2支点117で回転可能に設けられ、リンク118の一部に接触するローラと、を備え、アームの温度上昇に伴って第1支点119と第2支点117とが離れると、リンク118がローラ117に接触しながら第1支点119で回転して張力を軽減するようにした。
(もっと読む)
搬送装置及び真空装置
【課題】高温環境下において搬送物を確実に保持して高速搬送を図るとともに、搬送物の搬送時におけるダストをできるだけ少なくする技術を提供する。
【解決手段】本発明の搬送装置50は、駆動源からの動力が伝達される複数のアームを有する伸縮自在なリンク機構20と、リンク機構20の動作先端部において隣接する第3の左アーム3L、第3の右アーム3Rによって連結され基板10を載置するための載置部5とを備える。載置部5には、基板10の側部と当接して係止するための係止部5a、5bが設けられる。リンク機構20の隣接する第3の左アーム3L、第3の右アーム3Rには、基板10の側部と当接し基板10を載置部5の係止部5a、5bに対して付勢する付勢部6aを有する弾性の付勢部材6が固定される。付勢部材6は、第3の左アーム3L、第3の右アーム3Rの相対的な角度関係に応じて載置部5の係止部5a、5bに対する付勢部6aの距離が変化するように構成されている。
(もっと読む)
搬送装置
【課題】クリーンプロセスにおける真空雰囲気下で熱の影響に耐えうる板状ワークの搬送装置を提供する。
【解決手段】搬送装置A1は、固定ベース1と、固定ベース1に対して旋回可能に保持された旋回ベース2と、この旋回ベース2に対して揺動可能に支持されたリンクアーム機構3と、リンクアーム機構3に支持されたハンド4とを備え、旋回ベース2およびリンクアーム機構3の動作に伴いハンド4でワークを水平に保持しながら搬送するものである。旋回ベース2と固定ベース1との間には、気密シール23Aが設けられているとともに、固定ベース1および旋回ベース2には、冷媒循環路が設けられており、この冷媒循環路の一部は、気密シール23Aの近傍に配置されている一方、冷媒循環路は、固定ベース1と旋回ベース2との境界に形成した環状空間110A,210Aを含んで構成される。
(もっと読む)
溶湯搬送装置
【課題】 一般的に市販されている6軸などの多関節ロボットアームを用い、他の制御機構を設けなくてもよく、アームの先端に駆動力の伝達機構を持つ延長部材を取付けてラドルの駆動制御を行う溶湯搬送装置を提供する。
【解決手段】 多間接ロボットアームの先端にラドルを駆動できるように設けた溶湯搬送装置において、前記多間接ロボットアームの先端にはアームの長さ方向の軸を中心に回転する駆動部が備えられ、前記回転する駆動部の駆動力をラドルの上下駆動に用いることを特徴とする。
(もっと読む)
基板支持用エンドエフェクタ・アセンブリ
基板搬送用ロボットの為のエンドエフェクタ・アセンブリが全般的に提供される。一実施形態において、基板搬送中、四辺形基板を支持する為のエンドエフェクタ・アセンブリは、第1端部で配置された内縁部支持体と、末端部で配置された第1外縁部支持体と、を有するエンドエフェクタを含む。エンドエフェクタの第1端部は、ロボットリンク機構に結合するように適合されている。第1内縁部支持体は、第1外縁部支持体に平行となるように向けられ、第1外縁部支持体の面に対面する面を有する。縁部支持体の、この構成は、エンドエフェクタに対し基板を捕捉し、それにより、搬送中の基板の滑りを最小限にする。他の実施形態において、内縁部支持体と外縁部支持体との間が開放された、基板の端部に沿って基板の捕捉を更に高める側方ガイドが利用されてもよい。  (もっと読む)
(もっと読む)
1 - 7 / 7
[ Back to top ]