
Fターム[3C007BS05]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕直列配列 (1,746) | 3関節直角座標型 (108) | ガントリー型 (6)
Fターム[3C007BS05]に分類される特許
1 - 6 / 6
搬送装置及び搬送方法
【課題】収容物の出し入れを行う面を下側とし、その面のフラップの封止を行うことなく、かつ、収容物の脱落を防止しつつ箱体を搬送する。
【解決手段】開閉自在な左右一対のフラップ201を底面に有する箱体200の搬送装置であって、前記箱体200を保持する保持ユニット10と、保持ユニット移動手段とを備え、前記保持ユニット10は、前記箱体200の上面又は側面において前記箱体200を保持し、前記箱体200を昇降させる昇降手段11と、前記一対のフラップ201のそれぞれに当接し前記フラップ201の開放を規制する一対の当接部材14と、前記一対の当接部材14が前記箱体の下方において互いに近接して前記フラップ201の開放を規制する開放規制位置と、前記一対の当接部材が前記箱体の下方において互いに離間して前記フラップの開放を許容する開放許容位置と、の間で前記一対の当接部材を移動させる当接部材開閉作動手段12とを備えた。
(もっと読む)
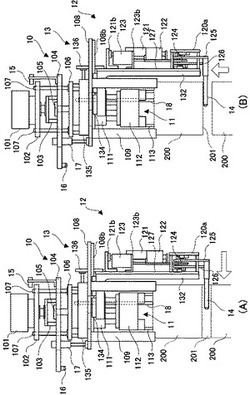
手術用マニピュレータ

【課題】指掛かり部が軸心に対して片側に偏った位置に形成された既存の鉗子を位置決めし、且つ、鉗子を開閉させる機構を有し、鉗子開閉時に生じる回転モーメントを吸収することのできる手術用マニピュレータを提供する。
【解決手段】指掛かり部122,124が軸心に対して片側に偏った位置に形成された鉗子120を装着可能な保持手段61を具える支持台60と、前記鉗子の指掛かり部を開閉させる開閉機構70と、該支持台を複数の軸回りに回転可能に保持する回転台50と、該回転台を平面方向及び/又は垂直方向に直線及び/又は回転作動可能に支持するアーム部30と、を有する手術用マニピュレータであって、回転台は、アーム部に対する支持台の各軸回りの回転を固定するロック機構51,55,57を有する。
(もっと読む)
大型枠組構造物の溶接ロボット装置
【課題】パネル上にロンジとトランスが交差している大型の枠組構造物の交差部を本溶接することができ、本溶接が可能な溶接部位の制約が少なく、人手に頼る手溶接がほとんど不要であり、大型ガントリ構造による従来のマルチロボット溶接装置と比較して装置全体を小型化でき、複雑な制御システムが不要である大型枠組構造物の溶接ロボット装置を提供する。
【解決手段】1対のロンジ2と1又は1対のトランス3で囲まれた升目形状の枠内を溶接対象領域4とし、溶接対象領域4を跨いで大型枠組構造物に固定され溶接対象領域の上部に位置する水平支持架台12を有するロボット架台10と、水平支持架台12の下面に取付けられ升目形状枠内(溶接対象領域4)の全域にわたり溶接ヘッドを3次元的に数値制御して溶接可能な溶接ロボット20とを備える。
(もっと読む)
電子部品搭載装置
【課題】吸着ノズル部の振動を抑制して、高精度で部品の高速搭載を可能とする電子部品搭載装置を提供する。
【解決手段】吸着ノズル22部の加速度を検出するためのセンサ(加速度センサ30、ジャイロセンサ)を設け、該センサにより検出した加速度信号により、駆動軸のモータ制御装置で吸着ノズル部の振動を抑制するようにした駆動軸の駆動制御を行なう。前記モータ制御装置は、前記センサにより検出された加速度信号を用いて構成される、負荷の変動やパラメータの変動を含む外乱を補償するための負荷側外乱オブザーバにて推定した負荷側外乱を、負荷側外乱から位置指令値までの逆システムを通してフィードバックすることができる。又、前記モータ制御装置は、外乱オブザーバで用いるモータ慣性のノミナル値を実際のモータ慣性よりも大きく設定することで位相進み補償を行なうことができる。
(もっと読む)
ロボット装置
【課題】無線通信回線を介して移動形のロボット30を駆動制御する。
【解決手段】グリッパ32、走行用のモータ33、昇降用のモータ34を有するロボット30をビーム31上に往復走行自在に設置し、無線通信回線を介して、ロボット30に搭載する制御コンピュータと、外付けの指令コンピュータ35とを双方向に接続する。
(もっと読む)
ロボットシステムを含む自動建設
一対のレール(1940)に摺動可能に装着された少なくとも2つの側部部材(1930)の間に延在し、それによって支持されるオーバーヘッド梁(1920)を含む可動ガントリーロボット(1910)を有するロボットシステム(1900)が、開示される。ノズルアセンブリ(1960)は、押し出すためにオーバーヘッド梁に可動式に結合される。 (もっと読む)
1 - 6 / 6
[ Back to top ]