
Fターム[3C007CW08]の内容
マニピュレータ、ロボット (46,145) | 第2の腕の動作形態 (416) | 第2の腕が回動するもの (374) | 垂直面内のみ回動 (108)
Fターム[3C007CW08]に分類される特許
101 - 108 / 108
ロボット手首機構およびそれに取り付けられたエンドエフェクタ操作方法
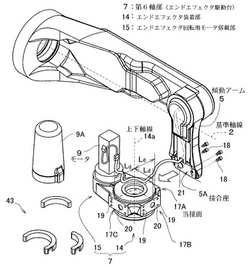
【課題】 ロボット動作域に周辺機器等の配置が余儀なくされる場合、第6軸部駆動用モータの存在に基因してロボットの動作に制約が課されないようにする。
【解決手段】 エンドエフェクタ駆動台7は、傾動アーム5から独立した別部品で構成され、基準軸線2とで一平面を形成するように置かれた上下軸線を持つエンドエフェクタ装着部14の周囲に、センタから等距離にある複数の当接面17A,17B,17Cが形成される。傾動アーム5の下端には当接面17A,17B,17Cを着座させることができる接合座5Aが形成され、エンドエフェクタ回転用モータ搭載部15の傾動アーム5に対する位置を変更するとき、エンドエフェクタ装着部14における現用当接面17Aと異なる当接面17B,17Cを接合座5Aに付け替えることによりエンドエフェクタ駆動用モータ9を位置替えし、周囲物との干渉を回避できるようにした。
(もっと読む)
ロボット

【課題】 可搬質量が大きくかつ小型化が可能な搬送ロボットを提供することである。
【解決手段】 第2アーム38の他端部38bが上部リンク35に対して水平方向に離反した状態で、アーム姿勢維持手段60の当接体62が第2アーム38の他端部33bに当接する。アーム姿勢維持手段60の当接体62は、第2アーム38の姿勢を維持するために必要な力の一部を第2アーム38に与える。アーム姿勢維持手段60を用いることによって、小さい駆動力を出力する第2アーム駆動手段42を用いて、被搬送物31を基台33に対して水平方向に離反した位置に搬送することができる。このように小さい駆動力の第2アーム駆動手段42を用いても、可搬質量を大きくすることができるのでロボットを小型化することができる。
(もっと読む)
ロボットのアーム構造
【課題】 ロボットのアーム動作が制限される場合であっても、被搬送物を移動可能な範囲が大きい搬送ロボットのアーム構造を提供する。
【解決手段】 上部リンク35に第2アーム38が連結され、第2アーム38に第3アーム39が連結され、第3アーム39に第4アーム40が連結される。これによって基台33に対して第1アーム36が予め定める位置に維持された状態であっても、第2アーム38〜第4アーム40を角変位することによって、第4アーム40に装着される保持手段を広範囲に移動可能とすることができる。これによって被搬送物を移動可能な範囲を大きくすることができる。
(もっと読む)
ロボットの寿命時間予測方法、ロボットの動作パターン作成方法、および、それらのプログラム
【課題】 ロボットの寿命が予想外に短くなることを防止できるロボットの寿命時間予測方法を提供する。
【解決手段】 本発明のロボットの寿命時間予測方法は、複数の軸を備えるロボット10が動作可能な寿命時間を予測する方法であって、基準となる基準動作パターンでロボット10を基準寿命時間Tg内に繰り返し動作させたときに発生する前記軸ごとの総トルク量τs1〜τs6を用いて、該基準動作パターンとは異なる任意動作パターンでロボット10を繰り返し動作させたときのロボット10の寿命時間を予測する(ステップS5)ことを特徴とする。
(もっと読む)
トランスファロボット
【課題】 ワーク搬送システムのスケールダウンおよび装置の小型化を図ることができ、かつ、ゴミなどの付着を防止しつつワークをスムーズに受け渡しすることができるトランスファロボットを提供する。
【解決手段】 トランスファロボットA1は、上下方向に開放したオープンスペース40をもつフレーム部材4と、オープンスペース40を跨いでフレーム部材4に梁状に設けられているとともに、ワークWの下面を支持しながら水平方向に伸縮する複数のスライドアーム機構5と、複数のスライドアーム機構5と上下方向に干渉することなくオープンスペース40内に収まるように設けられているとともに、フレーム部材4が下降移動して所定の位置にある状態では、相対的にオープンスペース40よりも上方に位置し、その際、ワークWを空気圧により浮上させて保持するエアベントステージ6とを備えている。
(もっと読む)
多関節ロボットの制御装置
【課題】ロボット本体における軸順序(駆動軸の順序)と駆動装置における軸順序とを容易に入れ替え可能な、多関節ロボットの制御装置を提供する。
【解決手段】複数の駆動軸を有するロボット本体5を制御する多関節ロボットの制御装置11において、ロボット本体5における少なくとも位置および角度を算出するロボット機構計算部1と、ロボット本体が具備する複数の駆動軸の軸順序を入れ替え可能な軸入れ替え部2とを有し、前記軸入れ替え部2を介して前記ロボット機構計算部1によりロボット本体5が具備する複数の駆動軸を制御するようにした。これにより、従来使用していた駆動装置4を用いながらも、ロボット本体5における駆動軸間のサーボモータの入れ替えに容易に対処できるものとなる。
(もっと読む)
産業用ロボット
【課題】ロボットの第1アームとワークや治具の干渉が少ない産業用ロボットを提供する。
【解決手段】 ロボットの第1アーム9を、旋回部4に対して回動する方向に、かつ第1アーム9と第2アーム12の内角と反対方向に湾曲させることにより、ロボットが治具16上に保持した箱形状のワーク17の内側で作業を行う場合、湾曲したアームの凹空間13において、干渉点18との干渉を避けることができ、ワーク底面19まで作業することができるので、従来のロボットのワーク内作業領域に比べ、広いワーク内作業領域20を確保することができる。
(もっと読む)
ロボットの手首部並びに傾動ハウジングを備えているこのロボットの手首部を構成する方法
【課題】
【解決手段】ロボットのアーム部(5)のためのロボットの手首部(7)は、第1の軸(C)を中心として回転するように配置された傾動ハウジング(8)を有し、更に、この傾動ハウジング(8)が第1の軸(C)を中心として回転するようにさせる第1のモータ(10)及び第1のギアアセンブリ(11)を有しており、そして、第1のモータ(10)の出力シャフト(15)が、第1の軸(C)と同軸となるように配置されている。  (もっと読む)
(もっと読む)
101 - 108 / 108
[ Back to top ]