
Fターム[3C007CW08]の内容
マニピュレータ、ロボット (46,145) | 第2の腕の動作形態 (416) | 第2の腕が回動するもの (374) | 垂直面内のみ回動 (108)
Fターム[3C007CW08]に分類される特許
21 - 40 / 108
ロボットアーム

【課題】小型の回転関節を備えていても高加速トルクを供給することができること。
【解決手段】駆動側リンク4cと従動側リンク4dとが従動側リンクを駆動側リンクに対して回転駆動させるトルクを供給する回転関節5cを介して連結されたリンク機構を有する装置であって、駆動側リンクに、回転関節の前記トルクのうちの加速トルクを補助するための加速補助トルクを供給する加速補助トルク供給機構7を備えることを特徴とするロボットアームを提供する。
(もっと読む)
6軸ロボットの2軸原点位置較正方法、6軸ロボットの制御装置、多関節型ロボットの軸原点位置較正方法及び多関節型ロボットの制御装置

【課題】専用の治具を取付けたり大型の検出器具を設置したりする必要がなく、多関節型ロボットにおける軸の原点位置を適切に較正する。
【解決手段】1軸の回転軸と2軸の回転軸が直交し且つ1軸の回転軸を含み2軸の回転軸に直交する平面上に測定点が存在し且つ3軸の回転軸及び5軸の回転軸が前記平面に直交するロボット2の制御装置3において、ロボット2を測定姿勢に保持させた状態から測定点の座標が戻るように各軸を移動させ、2軸の原点位置がずれていれば各軸を移動させる前での測定点の座標と各軸を移動させた後での測定点の座標とが一致しなくなる特性を利用し、各軸を移動させる前での測定点の座標と各軸を移動させた後での測定点の座標とを対比して誤差角度を導出して2軸の原点位置を較正する。
(もっと読む)
6軸ロボットの5軸原点位置較正方法、6軸ロボットの制御装置、多関節型ロボットの軸原点位置較正方法及び多関節型ロボットの制御装置
【課題】専用の治具を取付けたり大型の検出器具を設置したりする必要がなく、多関節型ロボットにおける軸の原点位置を適切に較正する。
【解決手段】4軸の回転軸と5軸の回転軸と6軸の回転軸とが1点で交わり且つ5軸の回転軸が4軸の回転軸及び6軸の回転軸と直交するロボット2の制御装置3において、ロボット2を測定姿勢に保持させた状態から測定点の座標が戻るように各軸を移動させ、5軸の原点位置がずれていれば各軸を移動させる前での測定点の座標と各軸を移動させた後での測定点の座標とが一致しなくなる特性を利用し、各軸を移動させる前での測定点の座標と各軸を移動させた後での測定点の座標とを対比して誤差角度を導出して5軸の原点位置を較正する。
(もっと読む)
ベアリングの固定構造
【課題】ベアリングの転動体案内部材を固定部材と固定子との間にボルトで共締めすることにより固定部材に固定する構造において、V溝に位置する転動体に対する与圧が変動してしまうことを防止できるベアリングの固定構造を提供する。
【解決手段】クロスローラベアリング23は、外輪29及び内輪30が軸に対して直交する分割面を有していないと共に、クロスローラベアリング23の外輪29或いは内輪30を、固定子による押圧部位の押圧方向への投影面がV溝29a,30aから外れるような形状にしたので、ボルトを強く締め付けることによりクロスローラベアリング23を固定部材と固定子との間に挟持状態で固定するにしても、押圧力がクロスローラベアリング23の外輪29及び内輪30のV溝29a,30aに作用することはない。
(もっと読む)
6軸ロボットの3軸原点位置較正方法、6軸ロボットの制御装置、多関節型ロボットの軸原点位置較正方法及び多関節型ロボットの制御装置
【課題】専用の治具を取付けたり大型の検出器具を設置したりする必要がなく、多関節型ロボットにおける軸の原点位置を適切に較正する。
【解決手段】2軸の回転軸と3軸の回転軸と5軸の回転軸とが平行で且つ交わらないロボット2の制御装置3において、ロボット2を測定姿勢に保持させた状態から測定点の座標が戻るように各軸を移動させ、3軸の原点位置がずれていれば各軸を移動させる前での測定点の座標と各軸を移動させた後での測定点の座標とが一致しなくなる特性を利用し、各軸を移動させる前での測定点の座標と各軸を移動させた後での測定点の座標とを対比して誤差角度を導出して3軸の原点位置を較正する。
(もっと読む)
パラレルメカニズム
【課題】 アーム等を揺動可能に連結するボールジョイントの外れを検知することが可能なパラレルメカニズムを提供する。
【解決手段】 パラレルメカニズム1を構成するアーム本体6は、第1アーム7と、一対のロッド9,10を有する第2アーム8と、ロッド9,10の一端と第1アーム7とを連結するボールジョイント16,17と、ロッド9,10の他端とブラケット14とを連結するボールジョイント18,19とを備える。各ボールジョイント16〜19は、球状頭部31を含むボールスタッド30と、球状頭部31を揺動回動自在に保持するソケット35と、球状頭部31とソケット35との間に介装される導電部材36とを有する。検知装置40は、ボールスタッド30、導電部材36、及びソケット35で形成される単位検知回路が4つ直列に接続された集合検知回路44の導通の有無に基づいて、ボールジョイント16〜19の外れを検知する。
(もっと読む)
腕運動支援装置
【課題】 従来までの上半身の動きを補助するための装置においては、前記補助装置を利用する際、利用者は自身の腕を前記補助装置に固定する必要があり、前記装置の利用者は、前記装置の装着時に違和感を感じることを余儀なくされていた。
【解決手段】 本発明は、利用者の上腕部分および前腕部分を支える、アルファベッドの「U」のような形などをした支持体を有し、前記前腕部分の支持体に、かまぼこ型状でありその表面が滑りやすい材質からなるセンサーを備えた腕運動支援装置である。
(もっと読む)
マニピュレータ
【課題】 アームとハンドとを備えたマニピュレータにおいて、ハンドを操作するための操作レバーの操作の際に、アームを操作するための操作ハンドルに意図しない操作力が入力されることを抑制する。
【解決手段】パワーアシストアーム(マニピュレータ)は、操作者がハンドの動作を視認可能な範囲内またはハンドが把持対象物を把持するときの音を聞き取り可能な範囲内に設置された操作装置を備えている。操作装置は、棒状体9を有する操作ハンドル13と、6軸力覚センサ10と、操作レバー15とを備えている。操作レバー15は、上側押圧プレート97および下側押圧プレート93と、連結プレート96に貼り付けられた歪みゲージ16とを備えている。棒状体9には、下向きに延びる第1支持棒91と下向きに延びる第2支持棒92とが設けられている。操作レバー15および操作ハンドル13は、固定プレート95に固定されている。
(もっと読む)
産業用ロボット
【課題】本発明は、水平方向、垂直方向、水平垂直方向に搬送可能で、ワークの搬送面を自由に変更することが可能で、ワーク搬送間にロボットの設置が不要な産業用ロボットを提供する。
【解決手段】ワーク32を搬送する産業用ロボット1において、回転軸が大地に対し略水平方向に設けられた第1アーム3と、前記第1アーム3先端部に設けられ、回転軸が前記第1アーム回転軸と同方向である第2アーム4と、前記第2アーム先端部に設けられ、アームの長手方向が前記第2アーム4の回転軸方向に固定された第3アーム5と、前記第3アーム5先端部に設けられ、直交する3軸の駆動部を持つリスト6を備えたものである。
(もっと読む)
多関節ロボット
【課題】多関節ロボットにおいて作業機に給電するケーブルが該作業機に当接することを防止する。
【解決手段】多関節ロボット10は、ロール回転する第6関節30と、第6関節30に接続された溶接ガン32と、一端が溶接ガン32に接続され、他端が第1支持部48に接続されたケーブル44と、溶接ガン32に接続され、第6関節30のロール軸Jを基準として径方向に張り出したフランジ42とを有する。フランジ42は、ロール軸Jを中心として、機構部40より大径であり、ケーブル44の一部を支持する第2支持部52を備える。第2支持部52は、ケーブル44をロール軸Jと略平行に支持する。第2支持部52は、ロール軸Jを基準としてC形状部材38と逆の位置に設けられている。
(もっと読む)
流体船積みおよび/または荷降ろしシステム用の直接制御、特に比例制御および/または直線的制御式装置
本発明は、海洋船積みシステム(2)用の結合器の動きと位置決めのための制御装置に関する。前記海洋船積みシステムは、ベースに固定されているライン端部を有する少なくとも1つの流体移送ラインと、目標ダクトへの接続用に適合されている結合器が設けられている可動ライン端部とを備え、前記システムは、ベースに対して少なくとも3自由度を結合器が有するように、複数の機械的接続部を更に有しており、制御装置は、それぞれが自由度においてシステムの動きを比例的に制御する少なくとも3つの比例式制御アクチュエータ(27、28、29)と、各自由度を追尾するシステムの位置センサ(30、31、32)と、結合器を動かすコマンドを入力するためのコマンド入力インタフェース(60)と、結合器の瞬間的位置を、センサから提供される情報から計算し、コマンド入力インタフェースの動きコマンド入力から、アクチュエータの組み合わされた動きが、コマンド入力インタフェースにおいてオペレータにより提供される動きコマンドに対応する結合器の動きとなるように、アクチュエータのそれぞれに与える同時制御指令を計算する計算機(41)と、を備える。 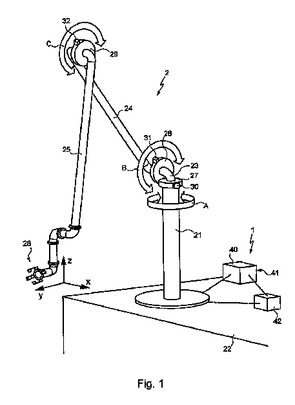 (もっと読む)
(もっと読む)
工業用ロボット
【課題】 補助装置の位置を微修正することにより、マニピュレータの特異点を回避する。
【解決手段】 補正移動装置目標値演算部27は、特異点判別部26が特異点近傍を判別すると、次時刻のツール先端のワークに対する位置及び姿勢を維持しつつ、次時刻のマニピュレータの姿勢が特異点近傍範囲外となるように、補助装置目標値Jsta(t)を補正して補正補助装置目標値Jsta(t)'を算出する。第2座標変換演算部28は、補正補助装置目標値Jsta(t)'を使用して、ツール目標値worldPta(t)をマニピュレータ座標系Σbaseに変換する。補正目標関節角度演算部29は、マニピュレータ座標系Σbaseに変換されたツール目標値worldPta(t)''の逆キネマティクス演算で補正目標関節角度Jmta(t)''を算出する。補正目標関節角度Jmta(t)''と補正補助装置目標値Jsta(t)'がマニピュレータ11と移動装置12に出力される。
(もっと読む)
ロボットの動作制御装置及びその動作制御方法
【課題】ロボットのの動的精度を向上させ、ティーチングに要する時間を短縮する
【解決手段】ロボット2の動作を制御する制御装置3は、軸毎に指令値に対する目標軌跡と実際の動作軌跡との差をサーボ遅れ時間として計算し、その計算した軸毎のサーボ遅れ時間を比較して軸毎のサーボ遅れ時間が複数の軸の全てで一致するように基準時間を決定し、その計算した軸毎のサーボ遅れ時間と当該決定した基準時間とに基づいて軸毎の補償トルクを計算し、その計算した軸毎の補償トルクを反映した指令値を各サーボに出力してロボット2の動作を制御する。
(もっと読む)
ロボットの動作制御装置及びその動作制御方法
【課題】ロボットの静的精度を向上させ、ティーチングに要する時間を短縮する。
【解決手段】ロボット2の動作を制御する制御装置3は、ロボット2の動作空間を複数の領域に分割し、その分割した動作空間毎に測定点を設定してDHパラメータを導出し、その導出した動作空間毎のDHパラメータのうち目標点が属する動作空間のDHパラメータを選択し、目標点に対して当該選択したDHパラメータを適用して座標変換を行うことでロボット2の動作を制御する。
(もっと読む)
ワインダー用コアの移載装置
【課題】ワインダー用コアを、X軸、Y軸又はZ軸を組み合わせた2軸方向又は3軸方向に移動させて、ワインダー装置に移載することができるワインダー用コアの移載装置を提供する。
【解決手段】コアwが収容された容器99に臨む位置に設けた、容器のコアを取り出す開口部の位置よりも高さを有する基体1と、この基体の上部に基端部が回動可能に連結された細長状の上腕部2と、この上腕部の先端部に基端部が回動可能に連結された細長状の前腕部3と、この前腕部に垂設されて、上記コアを吸着可能なハンドリング部4とを有し、かつ上記上腕部を駆動させる上腕駆動手段5と、上記前腕部を駆動させる前腕駆動手段とをそれぞれ上記基体の上部に設けた円筒状のコアをワインダー装置に移載するワインダー用コアの移載装置とした。
(もっと読む)
ロボット装置
【課題】6関節ロボットと併用して7関節ロボットを使用することで、ロボットの設置密度を高めた、生産効率の高いロボットによるロボットシステムを提供する。
【解決手段】7関節ロボットと前記6関節ロボットとを、前後方向に隣接して配置し、第2のアーム体、第3のアーム体、第4のアーム体、第5のアーム体を回転させ、J2を含むXY平面とJ1の交点及びJ6を支点として、J4が略円弧軌跡を描くことによって、前記6関節ロボットの下腕部または上腕部との干渉を回避する手段を備える。
(もっと読む)
ロボットアーム
【課題】精密な作業が可能であって人間の生活環境でも安全に使用でき、しかも極力小型軽量化できる多関節ロボットアームを提供する。
【解決手段】剛性能動関節とされた肘関節J3〜J5および手首関節J6,J7により、ハンドHDの位置や姿勢の精度が十分に確保されるため、ハンドHDによる精密な作業が可能となる。また、柔軟能動関節とされた肩関節J1,J2により、人体に接触した際の衝撃が緩和されるため、人間の生活環境での安全な使用が可能となる。さらに、大型で重量も嵩む柔軟能動関節は、基端部側の2つの肩関節J1,J2のみとされているため、大型重量化が最小限に抑えられる。しかも、重量の嵩む肩関節J1,J2の重量に起因する大きなモーメントは先端部側の肘関節J3〜J5、手首関節J6,J7には作用しないため、これらの関節を補剛する必要がなく、その分、大型重量化が抑えられる。
(もっと読む)
ロボットシステム
【課題】6関節ロボットと併用して7関節ロボットを使用することで、ロボットの設置密度を高めた、生産効率の高いロボットによるロボットシステムを提供する。
【解決手段】7関節ロボットと前記6関節ロボットとを、左右方向に隣接して配置し、7関節ロボットの第2のアーム体、第3のアーム体、第4のアーム体および第5のアーム体を回転させ、前記第1のアーム体と前記第2のアーム体を接続する関節および前記第5のアーム体と第6のアーム体を接続する関節を支点として、前記第3のアーム体と前記第4のアーム体を接続する関節が円弧軌跡を描くことによって、前記6関節ロボットの下腕部または上腕部との干渉を回避する手段を備える。
(もっと読む)
搬送装置および大型搬送装置
【課題】基台と搬送レベルとが異なる場合でも、第1アームと第2アームを同調させてほぼ直線的にワークを搬送できる搬送装置を提供する。その搬送装置を利用した大型搬送装置を提供する。
【解決手段】基台11に第1アーム12を第1軸J1廻りに回動自在に設け、第1アーム12の先端に、第1アームと長さが異なる第2アーム13を第2軸J2廻りに回動自在に設け、第2アーム13の先端にハンド14を取り付け、第1アーム12を往復揺動駆動する第1モータM1を基台11に設ける。基台11には第1軸J1と同心状に第1ピニオン16を固定し、第2アーム13の基端に、第2軸J2と同心状に第2ピニオン17を固定し、第1ピニオン16と第2ピニオン17の左右両側にラック18、19を摺動自在に設けて搬送装置10を構成する。2基の搬送装置10を一対で配置し、ハンド14同士を搬送ビームで連結することにより、大型搬送装置を構成する。
(もっと読む)
指令値生成装置
【課題】特異点近傍を通過する際、複数の関節が大きく動くのを防止でき、先端速度の低下を抑制して、動作時間を短縮できる指令値生成装置を得る。
【解決手段】予め領域を設定された特異点近傍領域に入る、もしくは通過したことを判別する特異点近傍領域突入判別手段8と、特異点近傍領域突入判別手段8で特異点近傍領域に入る、もしくは通過したと判別した場合に当該動作におけるロボット先端軌跡上での特異点近傍領域始点と特異点近傍領域終点を算出する近傍領域算出手段9を備え、ロボット先端軌跡上の特異点近傍領域始点と特異点近傍領域終点の間の区間では、当該始点及び終点の関節変位に基づいて関節位置指令を算出する。
(もっと読む)
21 - 40 / 108
[ Back to top ]