
Fターム[3C007CY26]の内容
マニピュレータ、ロボット (46,145) | 本体機構の目的 (1,591) | 防爆 (9)
Fターム[3C007CY26]に分類される特許
1 - 9 / 9
塗装ロボット及び塗装システム
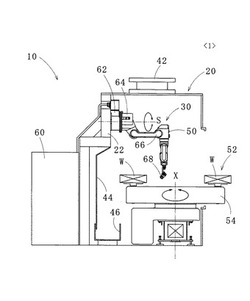
【課題】塗装ブースを小型化することが可能な塗装ロボット及び塗装システムを提供する。また、ケーブルを覆うケーブル保護部材を省略することが可能な塗装ロボット及び塗装システムを提供する。
【解決手段】 塗装ロボット50は、塗装ブース20の側壁22に固定される固定部62と、固定部62に対して旋回可能に設けられる旋回部64と、旋回部64に設けられるアーム66と、アーム66の先端部に設けられる塗装ガン68と、を備え、側壁22に固定される固定部62の固定面120に、ケーブル92a、92bを引き込むケーブル引込部112a、112bが設けられる。
(もっと読む)
内圧防爆構造のロボット

【課題】内圧防爆構造を有しながらも、また塗装ガンなど手首部先端のエンドエフェクタに接続される配管を有しながらも、コンパクトなロボットを提供すること
【解決手段】第1アーム64と第2アーム65とが互いに相対回転する関節部において、一端が危険雰囲気に開口し、第1アーム64の気密室37c内を通り、関節部の回転軸73を含むよう第1アーム64に固定された第1パイプ57と、一端が第1パイプ57に連通し、第2アーム65の気密室37d内を通り、他端が危険雰囲気に開口するよう第2アーム65に固定された第2パイプ59と、第1と第2アームの気密室を危険雰囲気からシールする第1シール部材55と、第1と第2パイプが互いに相対回転する部分をシールする第2シール部材58と、を備え、第1と第2パイプ内にエンドエフェクタへ接続されるチューブ68類が配線されるようにした。
(もっと読む)
ハンドマニプレータ
【課題】レバー部材に対する操作を停止させても掴んだ状態を継続し得ること、操作性を維持して気密性を高めること。
【解決手段】ハンドマニプレータに、トリガー状レバー部材302を引くと進出する作動棒303sと、これを進退自在に外装する、周側に貫通孔303pを開口したガイド管303gと、各貫通孔303pに挿入したクラッチボール303bと、クラッチボール303bを挿入した各貫通孔303pに対面させて配した傾斜面303tを有するクサビ面部材303wと、ガイド管303gに後退作用力を付与するバネ手段303dと、ガイド管303gを一時的に進出させる規制解除手段と、で構成する作用伝達軸307の後退動作規制手段303を付設し、支分伝達軸307dの後端と支分外装管308bの内周との間にダイヤフラム314を、ボール孔308bhの外面側に弾性シート313sを配した。
(もっと読む)
防爆エリア用バリア装置
【課題】外部装置と防爆エリア内の機器とを接続する信号線の電流・電流制限回路の後段で、電流・電圧制限回路によって波形の崩れた信号を外部装置から出力された状態に復元し、防爆エリア内の機器に高周波数の信号を正確に供給できるようにする。
【解決手段】防爆エリア外のロボットコントローラ30と防爆エリア内の教示用ペンダント20との間に設置される防爆エリア用バリア装置10に、電流・電圧制限回路11とともにコンパレータ回路12を備えた。電流・電圧制限回路11は、ロボットコントローラ30と教示用ペンダント20との間に接続される信号線401〜412のそれぞれの電流値及び電圧値を一定値以下に制限する。コンパレータ回路12は、電流・電圧制限回路11から出力される信号を基準値と比較して波形を整形する。
(もっと読む)
内圧防爆構造のロボット
【課題】内圧防爆構造のロボットにおいて、モータ及び位置検出器部内部に粉塵が入らない構造にするとともに、確実に掃気できる構成を開示することを目的とする。
【解決手段】気密室に内蔵する複数のモータ1の各々は、その内部がモータ部と位置検出部とに隔離され、モータフレーム6には、モータ部が存在するモータ部空間に貫通する第1の貫通穴部(18)と、位置検出部が存在する位置検出部空間に貫通する第2の貫通穴部(18)とを備えるよう構成し、保護気体が、第1の貫通穴部と、第2の貫通穴部とのそれぞれに供給されるように配管した。
(もっと読む)
塗装ロボット
【課題】 駆動モータを防爆型のモータを必要とせず、しかも、モータ容量を低減化できるようにする。
【解決手段】 塗装ロボットの各軸を駆動するモータをベース部11に集中配置し、ベース部が設置される空間と、ロボット本体が設置され塗装工程を行う作業空間との間を仕切壁24で隔絶する。
(もっと読む)
内圧防爆構造のロボット
【課題】内圧防爆構造のロボットにおいて、各関節を駆動するモータ内部の掃気が確実に行われるようにする。
【解決手段】各関節軸を駆動する複数のモータ1と、モータ1が配置される気密室37と、を備え、危険雰囲気に設置される内圧防爆構造のロボットにおいて、モータ1は、モータ内部に貫通する複数の貫通穴18をモータフレーム6に備え、貫通穴18の開口部には、フィルタ16を設けた特殊なモータを使用する。
(もっと読む)
内圧防爆システム及びその掃気方法
【課題】内圧防爆システムの掃気動作において、掃気開始前に気密室の圧力を所定の圧力まで上昇させる掃気準備動作で、そのときの圧力上昇を監視する圧力スイッチを削減する。
【解決手段】気密室を備えたマニピュレータ3と、気密室に不活性気体を導入する気体供給部2と、気密室からの気体を封止または開放する気体排気部4と、これらを制御するコントローラ1とからなる内圧防爆システムにおいて、掃気動作コントローラ1に、気体供給部2と気体排気部4による掃気動作の時間を計測するタイマーを備えた。
(もっと読む)
内圧防爆システム
【課題】内圧防爆機構の高圧異常を検出し、異常をユーザに通知する手段を設けることでエア機器点検を実施を促すとともに、過剰となった内圧室の圧力を軽減させる。
【解決手段】内圧防爆機構2から排出されるエアを開放させるエア排気部7に、高圧異常検出手段8と、圧力調整弁74とを設け、高圧異常検出手段8の動作圧力を圧力調整弁74の動作圧力よりも低い値に設定する。高圧異常検出手段8は、設定された圧力以上になると制御装置1に信号を送出し、制御装置1は警告手段9によって警告を発するとともに開放弁73を開き、過剰となった内圧防爆機構2の内圧室の圧力を軽減させる。
(もっと読む)
1 - 9 / 9
[ Back to top ]