
Fターム[3C007EV16]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 変形する当接部 (142) | 複数突起 (13)
Fターム[3C007EV16]に分類される特許
1 - 13 / 13
指ユニット及び把持装置
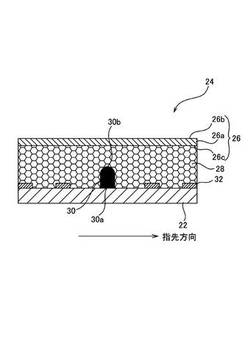
【課題】形状が複雑なものや破損したり傷付きやすい把持対象物であっても、適切に掴むことが可能な指ユニット及び把持装置を提供する。
【解決手段】把持装置を構成する指ユニットは、ベース部材22の表面に指腹機構部24を設けた構成とされている。指腹機構部24は、把持対象物に対して面接触可能な表層部26と、表層部26に追従して変形可能な中間部材28と、表層部に対して裏面側から押圧可能な支持部材30とを有し、ベース部材22と表層部26との間に中間部材28及び支持部材30が配された構造とされている。指腹機構部24は、把持対象物との接触に伴って表層部26に対して圧力が作用すると、支持部材30を支点として表層部26の姿勢が把持対象物の表面に沿うように変化し、把持対象物側に作用する圧力の局所的上昇が防止される。
(もっと読む)
医療用マニピュレータ

【課題】対象物をより安定して把持することができる医療用マニピュレータを提供する。
【解決手段】対象物を把持する医療用マニピュレータ1は、先端側に設けられ、開閉する第1鉗子片11及び第2鉗子片12と、第1鉗子片及び第2鉗子片の基端側に接続され、軸線方向に進退させることにより第1鉗子片及び第2鉗子片を開閉させる操作部材20とを備え、第1鉗子片及び第2鉗子片のそれぞれに設けられ、閉じる際に互いに接近して対象物と接触する把持面11A、12Aは、ヤング率が120ギガパスカル以下の金属材料で形成されていることを特徴とする。
(もっと読む)
ロボットハンド
【課題】所望位置で把持対象物を把持可能なロボットハンドを提供する。
【解決手段】把持対象物であるティッシュボックスQや紙コップTを把持する指部81を備えた把持部99は、以下のように構成されている。即ち、指部81のリンク84の把持面84aの所望位置に、把持面84aから突出する突起部84eを設けた。突起部84eは、指部81のリンク84の把持面84aの略中央に形成されている。突起部84eは、シリコンゴムなどの弾性体によって形成されている。突起部84eは、シリコンゴム、ウレタンゴム、又は、クロロプレンゴムによって形成されている。把持面84aには、荷重位置を検出可能な接触抵抗式面センサ84bが設けられている。
(もっと読む)
ロボットハンド
【課題】平面上に載置された物体を持ち上げるように把持する把持動作を、適切に行うことを可能とするロボットハンドを提供すること。
【解決手段】物体を把持するための屈曲動作を行う指本体を備えるロボットハンドにおいて、指本体の先端部に弾力性を備える薄板状の爪部を取り付けるとともに、この爪部を、指本体の先端部の腹部側に取り付けることで、指本体が屈曲動作を行って物体を把持する際に、爪部により指本体が物体の底面と平面との間に挿入可能とし、把持動作を行うことができるようにした。
(もっと読む)
ロボットマニピュレータ
【課題】物品を把持したまま任意の角度に回転制御可能とする。
【解決手段】ロボットハンドの指部2a、2bには把持接触部31が取り付けられ、把持接触部31の中央部には突起32aが設けられ、突起32aの周囲には突起32aよりも高さの低い突起32b〜32nが配置されている。突起32aは突起32b〜32nよりも表面の摩擦係数が低く、突起32aの先端のみが物品に接触しているときは、大きな圧力で2点支持しているときと同じ結果となり、物品は並進方向には拘束されるが、支持点を通る軸周りの回転方向には自由となる。指部2a、2bの把持力を大きくしてゆくと突起32aが凹んで高さが低くなり、摩擦係数の大きい突起32b〜32nでも物品は拘束されるため、物品は並進、回転方向共に拘束される。
(もっと読む)
ロボットハンド
【課題】物を安定して把持できるロボットハンドを提供すること。
【解決手段】本発明に係るロボットハンドは、掌リンク20と、掌リンクに連結される複数の指リンク10とを有する。指リンク10及び掌リンク20における物を把持する面の少なくとも一部に、柔軟性を有する材料から把持面が形成され、当該把持面のうち、掌リンクの把持面の摩擦係数を1.7以下とし、かつ掌リンクの把持面の摩擦係数が指リンクの把持面の摩擦係数以下とする。その摩擦係数を調整するために、把持面の表面に微小な凹凸を設けている。指リンク10は、掌リンク20に連結される根本側リンク11と、根本側リンク11に連結される指先側リンク12とを有する。
(もっと読む)
ロボット
【課題】本発明は、高精度の把持と柔軟な把持を同一の機構で実現するとともに、対象物との密着性も十分確保し、対象物の種別によらず安定な把持が可能となるロボットを提供する。
【解決手段】複数個のリンク4と、前記リンク4を連接する関節とからなるリンク連接機構と、指部5を備えたロボットにおいて、前記指部5は、第1の部材7と、前記第1の部材7よりも剛性が低い少なくとも1つの部材を備えたものである。
(もっと読む)
ネック部付き容器の個別支持装置およびかかる支持装置を使用した移送装置を備えた設備
【課題】本発明は、ネック部付き容器のための個別支持装置を提供する。
【解決手段】本発明は、ネック部により支持され、容器のネック部の内側に係合されうる支持部材を備え、支持部材が半径方向に弾性的に引き込み可能であり、ネック部の内壁に対して摩擦と共に支えうる支持要素を備え、支持部材が中央コアとコアを一定の半径距離で取り囲み、円形の外形の少なくとも1列の穴によって穴が開けるスカートをなす外壁との間で画定される周囲流路を備える略軸対称の円筒形ベース部と、穴と同数でそれぞれの穴と対向してチャンネルの中に少なくとも1つの列に配置された支持要素を形成し、直径が穴の直径よりも十分に大きい複数のボールと、ボールがそれぞれの穴の中に弾性によって押し返され、部分的に穴の外側に突出するようにコアとボールとの間に挿入された弾性戻し手段と、を備えることを特徴とするネック部付き容器のための個別支持装置に関する。
(もっと読む)
把持装置
【課題】把持装置に把持されたワークを所定の位置に位置決めする。
【解決手段】把持装置に設けられた把持パッド28の内部には、弾性体36と球体38とが内部に収容されている。この把持パッド28は、ワークとしてのドアミラー14が挟持されると、弾性体36が撓むことで該ドアミラー14の形状に対応する形状に変形する。そして、把持パッド28の内部から気体が排気されることにより、球体38が位置決め固定される。ドアミラー14が搬送された後、把持パッド28の減圧度が低減され、これにより弾性体36、ひいては把持パッド28が元の状態に復元しようとする。これに追従してドアミラー14が押圧され、該ドアミラー14が所定の位置に位置決めされる。
(もっと読む)
ワーク位置決め方法及びその装置
【課題】把持装置に把持されたワークを所定の位置に位置決めする。
【解決手段】把持装置10は、固定爪22と可動爪26を備え、これらの爪22、26には把持パッド28が設置されている。弾性体36と球体38とが内部に収容された把持パッド28は、ドアミラー14(ワーク)が挟持されると、該ドアミラー14の形状に対応する形状に変形する。そして、把持パッド28の内部から気体が排気されることにより、球体38が位置決め固定される。ドアミラー14のねじ部18がドアのねじ孔52に挿入されると、所定の把持パッド28の減圧度が低減され、これにより、該把持パッド28が元の状態に復元しようとする。これに追従してドアミラー14が押圧され、該ドアミラー14が所定の位置に位置決めされる。
(もっと読む)
ワーク挟持装置
【課題】ワークに変形や損傷を与えず確実に挟持できると共に、狭小空間においてもワークの挟持及び開放が可能なワーク挟持装置を提供する。
【解決手段】挟持装置1は、一対の押圧手段2,3により電線を挟持するものであり、夫々の押圧手段2,3は、薄板状に形成され積層された複数枚の押圧片10を有して構成される。夫々の押圧片10は、一対の押圧手段2,3の間隔を直線的に変化させる間隔可変機構30に連結される基部と、基部から延出され、電線を挟持する際に弾性変形可能な腕部と、腕部の基部側の端部に対向する端部から延設され、腕部の長手方向と直交する押圧方向に、電線を押圧して挟持する頭部とを具備する。
(もっと読む)
ロボットハンドの指構造
【課題】指の把持対象把持面を把持対象になじみ易くする把持対象の把持性能と、把持対象に剪断力が加わった際の中空部分での剪断変形を抑えた把持対象の把持位置の保持効果との両立を図り得るロボットハンドの指構造を提供する。
【解決手段】指骨格部材11の把持対象把持面12に、その斜面部12aおよび平面部12bに対し沿うように第1柔軟部材13を貼着するとともに、把持対象把持面12に対し中空部分14を存して覆うように第2柔軟部材15を取り付ける。そして、第1および第2柔軟部材の中空部分側面13a,15a上に、それぞれ縦方向および横方向に凹凸を繰り返す凹凸パターンを設けている。
(もっと読む)
ロボット装置
【課題】ロボット装置の把持機構の把持方法及び把持力にかかわらず、安定したすべり特性を持つ皮膚部材を設け、操作時の対象物の落下を防止する。
【解決手段】対象物の操作を行う場合、まず2本以上のフィンガ2、3で対象物を把持した状態で、外力を加えることによって各フィンガ2、3間で対象物を移動させる。このためには、移動の回転中心をフィンガの先端部の中央に持ってくることで、対象物がフィンガから離脱して落下することを防ぐことが可能である。例えば、フィンガの先端部に設けられた多層構造の皮膚部材の層間部に同心円状の凹凸形状を設け、皮膚部材のせん断弾性に方向特性を持たせることによって、回転中心がフィンガの先端部の中央に来るようフィンガ表面のすべり特性を設計する。
(もっと読む)
1 - 13 / 13
[ Back to top ]