
Fターム[3C007HS27]の内容
マニピュレータ、ロボット (46,145) | 駆動源 (1,598) | 電気式 (1,016) | 電動機 (855)
Fターム[3C007HS27]の下位に属するFターム
DDモータ (21)
Fターム[3C007HS27]に分類される特許
821 - 834 / 834
回転2足歩行ロボット
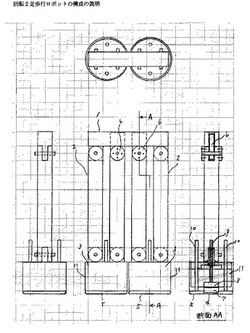
【課題】高級な部品、及び高度な制御技術を使わずに安価な2足歩行を実現する。
【解決手段】ベース1の下に、平行リンク機構2で構成し、リンクを駆動できる足を2本、同じ平面で動くよう取り付け、地面側のリンク3に対し回転軸4を地面側のリンク3と垂直でかつ、先の平面内にあるように回転する円盤5を取り付けた脚機構において、歩行する場合は、平行リンク機構の足を2本とも左に傾け、重心を左に移し、重心と反対側の足を右に移動して浮かし、重心側の左足を回転し、ある量回転したら、重心と反対側の足を左に移動し地面に着地させる。次に平行リンク機構の足を2本とも右に傾け、重心を右に移し、重心と反対側の足を左に移動し浮かし、重心側の右足を回転し、ある量回転したら、重心と反対の足を右に移動し地面に着地させる。以上を繰り返し歩行移動する。
(もっと読む)
ロボットの手首装置

【課題】回転軸および直交する2つの回転軸の計3軸を持つロボットの手首装置について、ケーブル配線も含めて、小型で、特に、手首軸径寸法が小さく、外観上もスマートな手首装置を提供する。
【解決手段】中空構造のアクチュエータ、駆動モータ、減速機、プーリ、ベルトなどの構成要素を最適に配置し、軸動作に伴うケーブル可動領域が小さい経路にケーブルを配線し、ケーブルのクランプおよびガイドの役割を果たす外形が円形あるいは球形のフレームやカバーを採用する。
(もっと読む)
電力線通信システム
【課題】 子局の接続台数が多い場合でも、細いケーブルを使用することができ、子局が放射状に位置するようなシステムでも、無理なく接続することができる電力線通信システムを提供する。
【解決手段】 電源供給を行うDC電源とDC電源より出力される供給電流が内部を流れる電力線とコイルから成る中継機と、中継機より電力線を介して供給電流を受ける親局と、中継機より電力線を介して供給電流を受ける複数の子局から成り、電力線を介して通信を行う電力線通信システムにおいて、複数の子局は前記中継機にスター型に接続されるようにした。
(もっと読む)
ロボットハンド
【課題】 本発明の目的は、把持対象物を壊してしまうことなく、より確実かつ安定して対象物を把持することの可能なロボットハンドを提供することにある。
【解決手段】 本発明のロボットハンドは、複数のリンク2とリンク2同士を連結する関節部1とを備えて構成された多関節の指Fを持つもので、各関節部1の屈曲内側に関節部1を覆うように弾性体3を備えている。この弾性体3は、その両端が関節部1をまたいでリンク2の屈曲内側表面に取り付けられると共に、その中央部が指Fに固定されていない。この中央部は、関節部1の屈曲に伴って屈曲内側に突出する。対象物を把持する際に指Fを曲げると、各弾性体の中央部がたわんで対象物の表面に押圧される。この結果、対象物は弾性体3によって押圧されて安定して把持される。弾性体3が程良く変形するため、把持に必要な押圧力を確保しつつも、対象物を握り潰してしまうようなことがない。
(もっと読む)
ロボットの手首部並びに傾動ハウジングを備えているこのロボットの手首部を構成する方法
【課題】
【解決手段】ロボットのアーム部(5)のためのロボットの手首部(7)は、第1の軸(C)を中心として回転するように配置された傾動ハウジング(8)を有し、更に、この傾動ハウジング(8)が第1の軸(C)を中心として回転するようにさせる第1のモータ(10)及び第1のギアアセンブリ(11)を有しており、そして、第1のモータ(10)の出力シャフト(15)が、第1の軸(C)と同軸となるように配置されている。  (もっと読む)
(もっと読む)
基板搬送装置
【課題】 本発明は搬送構造を改善した基板搬送装置を提供する。
【解決手段】 本発明による基板搬送装置は、ベース部20と;ベース部20上に直線運動ができるように設置されて、回転体32が備わっている運動部30と;運動部30の両側に並立設置されて、高さ調節が可能な一対のフレーム部40a、40bと;一対のフレーム部40a、40bの間に連結されて、フレーム部40の高さ調節動作に連動して、上下直線運動する搬送部50と;を含んで構成される。これにより、構造的な安全性を確保した状態で、簡便で精密に基板、特に大型基板を搬送させることが可能になる。
(もっと読む)
ロボットアームと、その回転関節装置及び手首装置
【課題】 非製造業分野のためのロボットアームについて、関節動作の制限をできるだけなくし、またアームと環境との干渉を避けやすい構造とすること、また、対人、対環境安全性を向上させるため、外力に順応する動作が可能な構造にする。
【解決手段】 回転可能に連結した2つのリンクを駆動するため、角度検出器とトルク検出器とアクチュエータとローカルコントローラ8とを有し、関節の回転と共に摺動しながらリンク間の電気的接続を維持するスリップリング機構を具備する。角度検出器およびトルク検出器から得られた角度およびトルクの値に基づきながら、マスタコントローラから指示された位置、トルク、剛性、粘性の各特性に関する制御を同時に実現するため、アクチュエータへの制御コマンドをローカルコントローラ上で演算し、かつリンク間の電気的接続を維持しながら無限に回転可能である。
(もっと読む)
移動ロボット用のリンク型ダブルトラック機構
【課題】本発明は階段を含む平坦でない地形を走行する運搬体用の走行機構の設計に関する。
【解決手段】本発明によるリンク型ダブルトラック機構は前、後トラック駆動部と;内蔵型のコントロールボックスと;コントロールボックスの前、後方に設置されてトラック角度を調整するための一対の角度調整フリッパー、及び角度調整トラックに設置されかつ内部に収納される高速走行用車輪から成る。
本発明によるリンク型ダブルトラック機構は、複雑な地形適応機構を必要とせず全体の構造が簡単で制御し易しいという利点がある。
(もっと読む)
光学式触覚センサ、光学式触覚センサを利用したセンシング方法、センシングシステム、物体操作力制御方法、物体操作力制御装置、物体把持力制御装置及びロボットハンド
【課題】 製作が容易であり、小型化も容易な光学式触覚センサを提供する。また、1種類のセンサによって複数種類の力学量を同時に測定することが可能な光学式触覚センサを利用したセンシング方法、センシングシステム、物体操作力制御方法、物体操作力制御装置、物体把持力制御装置及びロボットハンドを提供する。
【解決手段】 光学式触覚センサ11は、タッチパッド12と、タッチパッド12の挙動を撮影するCCDカメラ13を備える。CPU23は、CCDカメラ13からの画像情報を画像処理し、接触領域A1の大きさ、形状及び重心に関する情報を抽出し、固着領域A2の大きさに関する情報を抽出する。CPU23は、接触領域A1の大きさから法線力を求め、接触領域A1の形状及び接触領域A1の重心から接線力を求め、接触領域A1の大きさに対する固着領域A2の大きさの割合から摩擦係数を求める。
(もっと読む)
2つの部分から構成される遠隔操作アーム
本発明の遠隔操作アームは主アーム(5)及び従アーム(1)を備え、それら2つのアームは互いに機械的に分離されており、且つ、制御ユニット(7)と、従アームを駆動させるための機械ユニット(8)とを有するインターフェースシステム(6)によって連結されている。本発明によれば、機械ユニット(8)は、固定モータと、従アームの水平部分の管状セグメント(3)を少なくとも完全に1回転させて作業負荷を増大させる伝達装置とを有している。
選択図 図1  (もっと読む)
(もっと読む)
吸着パッド
【課題】単数/複数の個所で吸着ミスが発生しても連鎖吸着ミスを起こすことのない吸着パッドを提供する。
【解決手段】スカート部1を有するパッド部6及びシリンダ部2が固着され、ピストン部4が駆動部3の回転及びネジ部により該シリンダ部2の内部を摺動する吸着パッド。
(もっと読む)
移載機
【課題】リンク機構のみで、大きなストロークを確保して大型のガラス板でも、ストッカーなどと干渉することなく、高速で移載できるようにした移載機を提供すること。
【解決手段】先端に搬器4を取り付けた2本一対の搬器支持リンク2と、先端側に搬器支持リンク2を枢着したX字形の主リンク1と、主リンク1の基端側と枢着し、基端側の駆動軸Pにて揺動可能とした2本一対の揺動リンク3とよりなり、揺動リンク3の揺動にて前記リンク機構の屈伸作用で、姿勢を制御しつつ、直線の移載方向の運行軌跡に沿って搬器4を移動するように構成する。
(もっと読む)
ロボット装置及びその制御方法
【課題】マイク、カメラや種々のセンサで検出することが困難であった外部に存在する対象の情報の正確な確認や識別を可能とするロボット装置を提供する。
【解決手段】自律的に行動を出現させると共に、外部からの入力情報に応じて行動が制御されるロボット装置は、外部に存在する対象に設けられた無線タグ、いわゆるRFID(Radio Frequency Identification)タグから、該RFIDタグに記憶されているデータを読み取る無線タグ読取手段であるRFIDリーダ部19と、RFIDリーダ部19により読み取られたデータに応じた上記対象に関連する情報である対象関連情報に対応する状態認識情報に基づいて行動を制御するコントローラ10とを有する。
(もっと読む)
ロボット指関節等に応用できる高感度トルクセンサ調整方法
【課題】センサの材質および寸法を調整してアクチュエータトルクに存在するセンシングに必要なトルクを小さく調整する方法および、センサの感度拡大率とセンサの材質、寸法および上述した諸トルクの間の関係を明確にし、これらの関係を適当に調整して大きな感度拡大率を持たせるセンサを提供することを目的とする。
【解決手段】センサ機構1は、関節回転部2に装着し、モータ3と第1指リンク9の間にセンサ5と回転軸6が機構的に並列につながっている。指関節トルクを正確にセンシング及び制御するために、アクチュエータからのトルク=関節軸にかかるトルク+センサにかかるトルク、の関係からその三者中の任意の二者がそれぞれ線形関係を有し、それによってセンサ設計の時に三者間の関係を作業要求に応じて調整可能にしたことを特徴とするトルクセンシングを行う方法である。
(もっと読む)
821 - 834 / 834
[ Back to top ]