
Fターム[3C007HS28]の内容
マニピュレータ、ロボット (46,145) | 駆動源 (1,598) | 電気式 (1,016) | 電動機 (855) | DDモータ (21)
Fターム[3C007HS28]に分類される特許
1 - 20 / 21
相対駆動装置、移動体、及びロボット
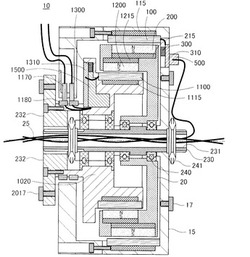
【課題】従来と異なる方式の相対駆動装置を提供する。
【解決手段】第1の駆動機構と第2の駆動機構とを有する相対駆動装置10であって、ステーター15と、第1のローター20と、第2のローター1020と、を備え、前記ステーターは、第1の電磁コイル100と前記第1の電磁コイルに流す電流を制御する第1の制御部500とを有し、前記第1のローターは、第1と第2の磁石200、1200を有し、前記第2のローターは、第2の電磁コイル1100と、前記第2の電磁コイルに流す電流を制御する第2の制御部1500とを有し、前記第1の電磁コイルと前記第1の磁石とは対向して配置されて、前記第1の駆動機構を構成し、前記第2の電磁コイルと前記第2の磁石とは対向して配置されて、前記第2の駆動機構を構成している。
(もっと読む)
コアレスモーター、コアレスモーターを搭載したロボットハンド、およびロボット

【課題】巻線効率が高く、且つ、高トルクなコアレスモーターを提供する。
【解決手段】中空の空芯巻線の内側に、円筒形状の永久磁石を設けてコアレスモーターを
構成する。また空芯巻線は、電線を菱形形状に巻回することによって形成する。そして、
菱形形状の一方の対角線は永久磁石の中心軸と平行とし、他方の対角線は、永久磁石の中
心軸に対して、永久磁石の磁極が切り換わる角度の1.2倍から1.6倍の角度範囲とな
る長さに設定する。こうすれば、菱形形状に巻回して空芯巻線を構成するコアレスモータ
ーの回転トルクを向上させることができる。また、電線が菱形形状に巻回されているので
、高い巻線効率を実現することが可能となる。
(もっと読む)
位置および姿勢の補正機構
【課題】高速に動作可能である、位置および姿勢の補正機構を提供する。
【解決手段】減速機を介さない複数のリニアモータ101A〜Fの組み合わせによって構成されるリンク機構と、複数のリニアモータ101A〜Fのそれぞれの位置を測定するリニアエンコーダ120A〜Fと、複数のリニアモータ101A〜Fのそれぞれに流れる電流値を測定する電流センサ110A〜Fと、リニアエンコーダ120A〜Fにより測定された上記位置および電流センサ110A〜Fにより測定された電流値が入力される制御部130とを備えている。制御部130は、算出された上記力と入力された複数のリニアエンコーダ120A〜Fのそれぞれの位置に基づいて、リンク機構の位置および駆動力を制御するリンク機構駆動指令部140を含む。
(もっと読む)
ダイレクトドライブモータ
【課題】雰囲気汚染を回避しながらも、高精度にロータの回転角度を検出でき、更に信頼性を確保できるダイレクトドライブモータを提供する。
【解決手段】隔壁13の円板部13aの肉厚が、円筒部13bの肉厚より厚くなっているので、寸法精度や機械精度および温度変化に起因して、隔壁13に変形が生じた場合でも、薄肉の円筒部13bが先に変形することで、隔壁13の軸方向応力や曲げ応力を緩和することができ、それによりシール不良や破壊などを防ぐことができる。
(もっと読む)
ダイレクトドライブモータ及びスカラーロボット
【課題】磁極の固定に起因する雰囲気汚染を回避しながらも、ロボットに必要な剛性を確保でき且つ信頼性の高い,大気外の雰囲気中で用いられるダイレクトドライブモータ及びスカラーロボットを提供する。
【解決手段】直列的に連結された3段のブラシレスモータBM1において、ステータ29と、大気軸受装置33と、大気側回転子30と、角度検出器35,36と、モータ回転子21と、真空軸受装置19のうち少なくとも2つを、モータ軸線方向において互いに少なくとも一部が重合する位置に配置しているので、コンパクトな構成ながら、高い剛性を確保することができる。
(もっと読む)
旋回駆動装置
【課題】モータとの干渉によるフラットケーブルの摩耗を防止することのできる旋回駆動装置を提供する。
【解決手段】フラットケーブル5のスプリング加工部5aをダイレクトドライブモータ3の回転中心位置に位置決めする位置決め部材11をダイレクトドライブモータ3のステータ部3aが固定されたモータベース4に設けると共にダイレクトドライブモータ3のロータ部3bに固定された取付けブラケット8に設け、ダイレクトドライブモータ3の回転時にフラットケーブル5のスプリング加工部5aがダイレクトドライブモータ3のステータ部3aに接触するのを防止した。
(もっと読む)
4自由度拘束ブレーキ装置及びパラレルリンク型ロボット
【課題】4自由度を拘束できるブレーキ装置を得る。該ブレーキ装置を用いブレーキ装置の数が少ないパラレルリンク型ロボットを得る。
【解決手段】拘束対象部材1を球状の中間部材2の中心穴に貫通させる。中間部材2は複数(3つ)に分割されている。中間部材2の外周には、ブレーキ動作部3a、3bが配設されている。磁気コア4a、4bに電流が流れると、ブレーキ動作部3a、3bは中間部材2から離れる(図4(a)参照)。拘束対象部材1も回転、軸方向への移動ができる。電流が絶たれた状態では、バネ7により、ブレーキ動作部3a、3bが中間部材2を圧接し、中間部材2が拘束対象部材1を圧接し、拘束対象部材1は任意の方向への揺動と、軸方向への移動及び軸中心線回りの回転の4自由度が拘束される(図4(b)参照)。パラレルリンクン型ロボットにこのブレーキ装置を用いることで、ブレーキ装置数を減らす。
(もっと読む)
基板搬送装置
直線的に配置された第一固定子と、第一アームに結合している第一回転子と、を有する第一シャフトレス回転モータと、直線的に配置された第二固定子および第二アームに結合している第二回転子を有し、第二アームが第一アームに連結している第二シャフトレス回転モータと、第一および第二アームのうちの少なくとも1つに結合している第一基板支持体と、を備える基板搬送装置であって、第一および第二固定子は、第一および第二アームならびに第一基板支持体が両固定子の内側にあるように、また、第一および第二シャフトレス回転モータと第一および第二アームのそれぞれの1つとの連結におけるモータ出力が、第一および第二アームの周辺に形成される合力であるように、構成されている  (もっと読む)
(もっと読む)
脚型ロボットの力センサ設置構造
【課題】 接地面積が小さい脚部を有する脚型ロボットであっても力センサを設置することができ、コストおよび演算負荷を低減するのに好適な脚型ロボットの力センサ設置構造を提供する。
【解決手段】 脚車輪型ロボット100は、基体10と、基体10に対して自由度を有して連結された複数の脚部12と、脚部12の脚先に回転可能に設けられた駆動輪20とを備える。脚部12のリンクのうち脚先に最も近いリンクは、一端に平坦面81を有する上部リンク80と、一端に平坦面86を有する下部リンク85とを備え、平坦面81の4隅に力センサ82をそれぞれ設置し、床反力の作用時に平坦面81、86が面接触するように上部リンク80および下部リンク85の一端同士を連結した。
(もっと読む)
ハンドリング装置
【課題】異なる部品を扱う上での柔軟性のレベルが高いハンドリング装置を提供する。
【解決手段】ハンドリング装置11は、キャリアユニット12を備える。キャリアユニット12は、ロボットアームに連結するための連結部13と、複数の作動モジュール14と、を備える。複数の作動モジュール14のそれぞれは、作動装置18を取り付けるための少なくとも1つの取付インターフェース17を備える。作動モジュールのそれぞれには、取付インターフェースの位置を設定するための調整手段が設けられる。調整手段は、制御装置からの電気的な制御信号によって制御される、複数の位置設定駆動部19、20,21を備える。複数の位置設定駆動部19、20、21は、x,y,z座標系を有するデカルト座標系におけるx方向、y方向およびz方向に取付インターフェースを移動できる。
(もっと読む)
マイクロマニピュレータ
【課題】弾力を有する微小物体を適切に把持できると共に、微小物体の弾力値を把握できるマイクロマニピュレータを提供する。
【解決手段】マイクロマニピュレータは、細胞を把持する把持指と、把持指を駆動する把持アクチュエータと、把持アクチュエータに内蔵され把持アクチュエータの回動角度を検出するホール素子と、少なくとも把持指が細胞に接触した後に、入力された把持アクチュエータの目標角度とホール素子で検出された回動角度との角度差が小さくなるように把持アクチュエータに供給する電流値を制御し、角度差に基づいて把持指が細胞を把持したかを判断し、把持したと判断したときに微小物体の弾力値を演算するPLC8と、を備えている。把持アクチュエータに供給される電流値が把持に伴う細胞からの反発力にあわせて制御される。
(もっと読む)
多関節搬送装置及びそれを用いた半導体製造装置
【課題】各モータの同期動作を容易に制御できると共に、省配線化及び小型化を実現できる多関節搬送装置を提供する。
【解決手段】複数のアーム22・・52が互いに関節を介して回転可能に連結され、前記関節に設置された複数のダイレクトドライブ方式のモータ210・・510を有し、該複数の各モータの駆動により前記各アームを回転させて最後の前記アームに搭載した被搬送体を搬送する多関節搬送装置において、前記各モータの制御に必要な電気信号を光信号に変換して伝達する制御装置111と、前記光信号を電気信号に変換すると共に電気信号を光信号に変換する信号変換器21・・41と、前記制御装置からの前記光信号を前記信号変換器に伝達する光通信手段113と、該信号変換器によって変換された前記電気信号によって前記各モータを駆動すると共に前記モータからの前記電気信号に基づいて前記各モータの駆動を制御する。
(もっと読む)
基板の搬送ロボット
【課題】移載室の内容積を小さくすることができる基板の搬送ロボットを提供する。
【解決手段】搬送ロボット4aは、同心状に備える2つの駆動源15、16と、各駆動源15,16の側面に突出して備える駆動アーム17,18と、駆動アーム17,18の他端に備える2つの従動アーム19〜22と、2つで1組をなす従動アーム19〜22の先端に備えるハンド23,24と、からなるものである。この搬送ロボット4aは、各駆動源15,16を異方向、若しくは同方向に回動することで各アーム17〜22を介して第一ハンド23、第二ハンド24を進退動作、回動することができる。
(もっと読む)
モータ、およびこれを備えたウエハ搬送ロボット
【課題】 回転子側の永久磁石からモータ外部へ漏洩する磁束を低減したモータを提供する。
【解決手段】 永久磁石5の軸方向の両側に配置され且つ回転子ヨーク6と磁気的に結合された磁性体リング1a、1bを追加すると共に、電機子コア3の軸方向の長さを前記磁性体リング1a及び1bと対向する位置までの長さとし、更に、前記磁性体リング1a、1bはそれぞれ前記永久磁石5の軸方向端面から磁性体リング1a、1bまでの距離Aが前記電機子コア3の内周面と前記永久磁石5の表面との間の距離Bと等しくなる位置に設けられ、前記磁性体リング1a、1bの外周面は前記永久磁石5の表面の延長面となるような寸法にした。
(もっと読む)
搬送装置およびスパッタリング装置
【課題】搬送効率を向上させ得る搬送装置を提供する。
【解決手段】ベース部31を回動させるモータ32と、ベース部31の中心部に挿通された中心軸33を回動させるモータ34と、基材101を保持可能に構成されると共に中心軸33に対して接離する方向に沿ってスライド可能にベース部31に配設されたスライダ35a,35bと、中心軸33の回動に応じてスライダ35a,35bをスライドさせるリンク機構とを備えている。これにより、基材101を搬送する効率を向上させることが可能となる。
(もっと読む)
モータシステム
【課題】
雰囲気汚染を回避しながらも、高精度にロータの回転角度を検出できるモータシステムを提供する。
【解決手段】
第1外側ロータ21と第2外側ロータ21’との間に、磁気シールド板25,41を配置しているので、相互の磁気的干渉を抑制し、誤駆動や連れ周りなどの不具合を回避している。又、本体12においてダイレクトドライブモータD1,D2の間を延在するフランジ部12aの外周縁12bは、磁性体である炭素鋼を材料とし、第1ステータ29と第2ステータ29’から発生する磁束によって、第1外側ロータ21又は第2外側ロータ21’に誤った回転方向の推力を発生させないように、互いの磁界を遮蔽する磁気シールドとして機能する。
(もっと読む)
ダイレクトドライブモータ
【課題】
雰囲気汚染を回避しながらも、高精度にロータの回転角度を検出でき、更に信頼性を確保できるダイレクトドライブモータを提供する。
【解決手段】
隔壁13の円板部13aの肉厚が、円筒部13bの肉厚より厚くなっているので、寸法精度や機械精度および温度変化に起因して、隔壁13に変形が生じた場合でも、薄肉の円筒部13bが先に変形することで、隔壁13の軸方向応力や曲げ応力を緩和することができ、それによりシール不良や破壊などを防ぐことができる。
(もっと読む)
手術支援装置
【課題】本発明は、各駆動部の負荷をより正確かつ速やかに操作器にフィードバックすることができ、操作性を向上させることができる手術支援装置を得ることを目的とするものである。
【解決手段】マニピュレータ3にマニピュレータ駆動機構が設けられている。マニピュレータ駆動機構21には、ダイレクトドライブ方式のスレーブ側モータ14が設けられている。操作器1の関節部には、ダイレクトドライブ方式のマスタ側モータ6が設けられている。操作器1は、マニピュレータ3からの力覚フィードバックを受けるように制御される。
(もっと読む)
ロボットハンド
【課題】簡易なハンド機構及び制御により複雑な把持対象物体の安定把持を実現する。
【解決手段】屈伸自在に連結された2節以上のリンク部材11,12,13からなる指機構10を2本以上備え、各指機構をベース部に連結してなるロボットハンドにおいて、少なくても1節以上のリンク部材が指長手方向軸中心02に回転する構成である。そして、リンク部材に設けた感圧センサ30からの信号を利用し、リンク部材を把持対象物の形状に応じて、指長手方向の軸中心02廻りに回転させる。
(もっと読む)
搬送装置及びその制御方法並びに真空処理装置
【課題】回転用モータの回転駆動力を搬送用アームに正しく伝達させるとともに回転駆動軸の回転角度を正確に検出することにより、搬送部における搬送対象物を正しい位置に搬送可能な搬送装置を提供する。
【解決手段】本発明の搬送装置1は、気密構造を有するハウジング61内に、所定の同心回転軸を中心として互いに独立して回動可能に構成された第1〜第3駆動軸1a〜1cと、第1〜第3駆動軸1a〜1cの所定の部位にそれぞれ取り付けられた永久磁石32a〜32cと、永久磁石32a〜32cと対応して設けられた電磁コイル34a〜34cとが配設されている。電磁コイル34a〜34cに対し所定の情報に基づいて駆動電流を供給して第1〜第3駆動軸1a〜1cを駆動し、第1〜第3駆動軸1a〜1cに固定された第1及び第2リンケージ12a、12bによって搬送対象物を搬送する。
(もっと読む)
1 - 20 / 21
[ Back to top ]