
Fターム[3C007KS11]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | 作業環境(例;雰囲気温度) (665) | 作業者の位置、状態 (250)
Fターム[3C007KS11]に分類される特許
1 - 20 / 250
ロボット装置
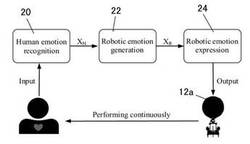
【課題】 人の表情から人の情動を認識し、情動同調の手法を利用して制御するロボット装置を提供する。
【解決手段】 ユーザに視認させる表情を表出する表出部12aと、ユーザの表情に基づいてユーザの情動状態を解析する情動認識部20と、ロボットの情動状態を、情動認識部20によって認識されたユーザの情動状態に誘導するようにロボットの情動状態を生成する情動生成部22と、情動生成部22により生成されたロボットの情動状態に基づいて、ロボットから表出させる表情を生成する情動表出部24とを備える。
(もっと読む)
カメラシステムおよびその制御方法

【課題】高操作性を確保しつつ、ミスコミュニケーションの発生を軽減することができないという問題を解決することが可能なカメラシステムを提供する。
【解決手段】画像処理部16は、カメラ11で撮像された撮像画像に対して、その撮像画像内の所定領域を加工する画像処理を行って、加工画像を生成する。表示部は、加工画像を表示する。操作部は、カメラの向きを示す操作コマンドを受け付ける。モータ制御部18は、操作コマンドに応じてカメラ11の向きを調整する。
(もっと読む)
ロボットシステムおよびそれに用いる空間陣形認識装置
【構成】 ロボットシステム100は、ロボット10およびモーションキャプチャシステム12を含む。ロボットシステム100では、ロボット10および人の位置、体の向きおよび視線方向を用いてロボット10と人との空間陣形を分析し、ロボット10および人の対話参加状態を認識する。そして、認識した対話参加状態に応じて、ロボット10が適宜の行動を取ることによって、ロボット10および人の双方が対話参加状態になるようにした後、ロボット10が人に対して挨拶発話を行う。
【効果】 双方が対話参加状態となる空間陣形を生成した後に挨拶発話を実行するので、ロボットは人との対話を自然に開始でき、円滑にコミュニケーションを図ることができる。
(もっと読む)
コミュニケーションロボット
【課題】人で混雑した環境にも適応できる多様なコミュニケーションを提供すること。
【解決手段】コミュニケーションロボット10は、密集度DBを含み、人と共存する様々な環境に配置されて様々なコミュニケーション行動を実行する。密集度DBには、環境を区分したエリアのそれぞれと対応付けて、当該エリアにおける密集度の許容値が記憶される。コミュニケーションロボット10は、コミュニケーション行動を実行する際には、自身の現在地を取得するとともに、その現在地が含まれるエリアの現在の密集度を取得する。そして、現在地が含まれるエリアの密集度が当該エリアに対応する許容値以上か否かを判断し、その判断結果に従って、コミュニケーション行動の実行を制御する。
(もっと読む)
コンテンツ提供システム、コンテンツ提供方法、及びコンテンツ提供プログラム
【課題】ユーザのコンテンツに対する反応を容易に取得でき、ユーザ嗜好に合ったコンテンツを提供する。
【解決手段】コンテンツ提供システムは、コンテンツを出力する出力部203と、ユーザの挙動を検出するセンサ212から得られる情報に基づいて、ユーザの挙動の種類を判定する判定部208と、出力部203で出力されたコンテンツに対応する判定部208による判定結果に基づいて、出力部203がさらに出力するコンテンツを決定するコンテンツ選択部209とを備える。
(もっと読む)
移動ロボット、移動ロボット用の学習システムおよび移動ロボットの行動学習方法
【構成】 移動ロボット10は、周囲反応情報データベース88を備え、イベント会場や街中などの人と共存する様々な環境に配置され、案内および荷物運搬などの様々なサービスを提供する。そして、サービスを提供する際には、複数種類の移動の仕方によるサービスの提供を試み、自身の行動に対する周囲の人の反応状況から適切な行動を学習して、その後のサービスの提供に生かす。
【効果】 周囲の人の反応状況から適切な行動を学習するので、人と共存する環境において効果的にサービスを提供できる。
(もっと読む)
移動体
【課題】効率良く与えられたタスクを行うことができる移動体を提供する。
【解決手段】本発明に係る移動体1は、移動障害物を検出する移動障害物検出手段6,7と、移動障害物と移動体1とが所定間隔以内に接近するか否かを判定する接近判定手段14と、移動障害物と移動体1とが所定間隔以内に接近すると判定した場合に、標準回避動作Cを計画する標準回避動作計画手段15と、標準回避動作Cに基づいて、移動体1が移動障害物を回避する回避動作と移動障害物に回避を促す働きかけ動作とを兼ねる働きかけ回避動作Eを計画する働きかけ回避動作計画手段16と、働きかけ回避動作Eに基づいて移動体1を制御する制御手段13と、を備え、働きかけ回避動作計画手段16は、標準回避動作Cにおける動作変化の速度及び動作変化の変化量のうち少なくとも一方を大きくした回避動作を働きかけ回避動作Eとして計画する。
(もっと読む)
位置情報制御システム、位置情報制御装置、位置情報制御方法、及び位置情報制御プログラム
【課題】専用の部材を取り付けなくても、ロボットであることを識別することができる、位置情報制御システム、位置情報制御装置、位置情報制御方法、及び位置情報制御プログラムを提供する。
【解決手段】第1の位置情報取得部2は、物体の第1の位置情報を取得し、第2の位置情報取得部302は、移動体の移動に基づく第2の位置情報を取得し、位置情報認識部303は、前記物体の第1の位置情報の時系列と前記第2の位置情報の時系列とを照合し、前記第2の位置情報の時系列が合致する前記物体の第1の位置情報の時系列を、移動体の位置情報の時系列と認識する。
(もっと読む)
移動ロボット
【解決手段】移動ロボット10は、移動速度データベース88を含み、人と共存する様々な環境内を自律的に移動する。移動速度データベース88には、人の移動速度の傾向を表す代表値に応じて定められる最大移動速度が、環境内の各エリアのそれぞれと対応付けて記憶される。移動ロボット10は、移動する際には、現在地に対応する最大移動速度を移動速度データベース88から読み出して設定し、設定した最大移動速度を上限とした移動速度となるように移動する。
【効果】周囲の人と調和した移動が可能となるので、周囲の人の邪魔になることなくスムーズに移動できる。
(もっと読む)
人の動作における意図推定装置
【課題】人の動作において、表面筋電位等の生体信号に頼らずにそれが意図したものであるか否かを識別する。
【解決手段】人の動作している位置、および角度の計測方法を用いて動作情報を取得し(S700)人の動作を人が実現可能な範囲に制限し(S701)、その動作中における人の関節角度と動作している部位の先端位置の位置情報を抽出し(S702〜S703)多変量解析手法を用い(S704〜S709)、さらに人の動作が意図するものであるか否かを識別する閾値を用いて、人の動作がその人が意図するものであるか否かを識別する(S710)ことで、表面筋電位等の生体信号に頼らずに、動作が意図したものであるか否かを識別することを可能にした。
(もっと読む)
会話ロボット
【課題】状況に応じた自然な会話を行い得る会話ロボットを提案する。
【解決手段】会話ロボット1では、主注目対象角度θ1及び従注目対象角度θ2を算出し、これら主注目対象角度θ1と従注目対象角度θ2とを全て合算した後、認識したユーザ(ユーザA及びユーザB)の総数で除算して重心方向角度θCG1を算出し、胴体部正面8bをこの重心方向角度θCG1まで回動させる。このように、会話ロボット1では、胴体部正面8bを重心方向角度θCG1まで回動させることで、重心方向に胴体部正面8bを向けさせて、ユーザAだけでなくユーザBに対しても、あたかも注目しているかのような印象を与えることができ、かくしてユーザA又はユーザBとの間で状況に応じた自然な会話を実現し得る。
(もっと読む)
ロボットアームの制御装置、制御方法、及び制御用プログラム
【課題】高価なセンサ等を用いることなく物体が挟まれた位置を正確に検出し、挟み位置に応じてトルクを最適に制御できるようにする。
【解決手段】関節角度の検出値θが目標値θrに追従するように生成される基本トルクT0に安全モータトルクプロフィールPsによる制限を適用することにより安全モータトルクTsを演算する。θに対するTsの変化に基づいてリンク機構21への物体の挟み込みを検出する。物体の挟み込みが検出された場合に関節部から物体までの挟み位置xを推定する。挟み位置xに応じてPsを設定する。
(もっと読む)
人物検出装置、人物検出方法及びプログラム
【課題】人物検出装置、人物検出方法及びプログラムにおいて、人物の移動時及び静止時にかかわらず脚の特徴を抽出して人物を正確、且つ、比較的簡単に検出することを目的とする。
【解決手段】重力方向と略垂直な平面で走査範囲を走査して基準位置から走査範囲内の対象物までの距離を測定してレンジデータを出力する走査部と、レンジデータを所定周期でサンプリングしてセグメントを形成し、セグメントに基づいて脚の特徴を抽出する抽出部と、抽出した特徴の運動特性及び幾何情報に基づいて人物を検出する検出部を備え、抽出部は、最短距離近傍法を用いて取得した2つのセグメントペアの移動特性に基づいて、各セグメントペアが静止している静止セグメントを分類する静止特徴強分類器と、各セグメントペアが移動している移動セグメントを分類する移動特徴強分類器を含み、分類されたセグメントの特徴に基づいて2つのセグメントペアから脚ペアを抽出するように構成する。
(もっと読む)
マスタ・スレーブ方式マニピュレータの制御装置及びその制御方法
【課題】マスタマニピュレータの操作対象のスレーブマニピュレータを、切替操作により他のスレーブマニピュレータに切り替えた場合に、当該マスタマニピュレータの姿勢を、新たな操作対象のスレーブマニピュレータの姿勢に合わせる処理を効率的に行うマスタ・スレーブ方式マニピュレータの制御装置及び制御方法を提供すること。
【解決手段】マスタ・スレーブ方式マニピュレータの制御装置を次のように構成する。マスタマニピュレータに操作者3の手が位置しているか否かを検出する接触センサ311R,311Lと、接触センサ331R,331Lによって、マスタマニピュレータに操作者3の手が位置していないことが検出された場合に、マスタマニピュレータの姿勢を、スレーブマニピュレータの姿勢に合わせるように、マスタマニピュレータを移動させる制御を行うマスタ制御回路300と、を具備させる。
(もっと読む)
ロボット制御方法、プログラム、及びロボット
【課題】ロボットの自律動作における不自然さを軽減させる。
【解決手段】可動部を有するロボットが、センサから出力される音声データまたは画像データに基づいて、ロボットに対する対話要求を検出し、検出された対話要求を示す検出データに検出の信頼度を含めて出力し、信頼度が所定レベルより高い場合は、検出データに基づいて可動部を動作させ、信頼度が所定レベルより高くない場合は、予め登録された動作データに基づいて可動部を動作させる。
(もっと読む)
人間協調ロボットシステム
【課題】人間がロボットに接触しうる環境においても人間の安全を確保する。
【解決手段】ロボット(2)と人間(1)とが領域を共有して協調作業を行う人間協調ロボットシステムにおいて、ロボットの先端に取付けられた作業機器(3)に設置されるかまたはロボットに設置された力センサ(4)を具備し、力センサの検出値が所定の値を超えた場合には記ロボットを停止または力センサの検出値が小さくなるようにロボットの動作を制御するようになっており、ロボットは、人間から力センサの設置位置よりも遠位に位置する第一ロボット部位(6)と、力センサの設置位置よりも人間に対して近位に位置する第二ロボット部位(7)とを含んでおり、ロボットシステムは、ロボットが人間に最も接近した場合においても人間による第一ロボット部位への接触を防止するように人間の作業領域を制限する制限部(5)を具備する。
(もっと読む)
コンパクトな駆動ユニットを持つ広報用ロボット
【課題】人体模型を屈伸駆動させる駆動ユニットをコンパクトにして人体模型に内蔵し、人体模型の屈伸動作を滑らかに進行させることでより効果的な広報になるようにした広報用ロボットを提供する。
【解決手段】下体部と、前記下体部の上部に屈伸動作が可能に結合される上体部とを含む人体模型;及び駆動モーター、前記駆動モーターに回転可能に結合されるスクリューバー、前記スクリューバーに昇降可能に結合される昇降部材と、下部は人体模型の下体部に配置され、上部は人体模型の上体部に固定結合されて配置され、固定軸に回転可能に軸設されている回転ロッド、上端は前記回転ロッドの下端に軸設され、下端は前記昇降部材に軸設され、前記固定軸を軸として前記回転ロッドを一定範囲内で回転させる中継ロッドとを含む駆動ユニット;を含んでなる広報用ロボット。
(もっと読む)
グローブボックス、密閉空間作業システム、制御プログラム、グローブ装着検知装置、及び作業機器
【課題】作業機器を設けた作業空間で作業者がグローブを用いて作業を行う場合に、煩雑さを低減させることが可能なグローブボックスを提供する。
【解決手段】グローブボックスの一例であるアイソレータ1は、少なくとも壁面により密閉された作業空間Sを形成するケース3と、ケース3壁面から作業空間Sに向かって延びる形で設けられたグローブ5と、グローブ5への作業者の手の装着状態を検知するグローブ装着状態検知部7と、グローブ装着状態検知部7からの装着情報を、この装着情報に基づき作業空間Sに設けられた作業空間Sで作業を行うために使用される搬送ロボット20を制御する主制御部40に繋がる装着信号受信部40Rへ送信する装着信号送信部7Sと、を備える。これにより、グローブ5の装着情報に基づいて搬送ロボット20が制御され、搬送ロボット20の動作に対する入力操作の煩わしさや操作ミスが低減される。
(もっと読む)
ロボットの接触種類判別システム
【課題】簡単な構成で接触の種類を判別することができるロボットの接触種類判別システムを提供する。
【解決手段】本発明に係るロボットの接触種類判別システム100は、ロボット1への接触によって外力が作用する際に、接触の種類を判別する接触種類判別システムである。接触種類判別システム100は、ロボット1に搭載された、外力の力学特性を示す3軸方向以上の成分を検出する第1の検出部110と、第1の検出部110の検出結果に基づいて特徴量を算出する特徴量算出部152と、特徴量と予め接触の種類に対応するように取得したサンプル特徴量とをパターンマッチングし、ロボット1への接触の種類を判別する接触種類判別部153と、を備える。
(もっと読む)
ロボット、位置推定方法及びプログラム
【課題】ロボット、位置推定方法及びプログラムにおいて、比較的簡単、且つ、正確に観測対象であるユーザの位置を推定することを目的とする。
【解決手段】少なくとも1軸を中心に回転可能なカメラの撮像画像から観測対象と推定される観測対象らしき画像の観測値を画像生成部により計算し、観測対象の位置の過去の推定結果と現在の前記カメラの姿勢に基づいて観測対象らしき画像の予測値を画像予測部により計算し、画像比較部により前記観測値と前記予測値を比較して前記観測値と前記予測値の一致度を尤度として計算し、前記尤度に基づいて前記観測対象の位置を位置推定部により推定するように構成する。
(もっと読む)
1 - 20 / 250
[ Back to top ]