
Fターム[3C007KS39]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | 音声 (227)
Fターム[3C007KS39]に分類される特許
1 - 20 / 227
カメラシステムおよびその制御方法
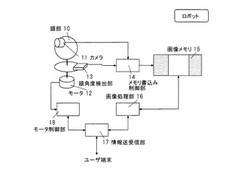
【課題】高操作性を確保しつつ、ミスコミュニケーションの発生を軽減することができないという問題を解決することが可能なカメラシステムを提供する。
【解決手段】画像処理部16は、カメラ11で撮像された撮像画像に対して、その撮像画像内の所定領域を加工する画像処理を行って、加工画像を生成する。表示部は、加工画像を表示する。操作部は、カメラの向きを示す操作コマンドを受け付ける。モータ制御部18は、操作コマンドに応じてカメラ11の向きを調整する。
(もっと読む)
コンテンツ提供システム、コンテンツ提供方法、及びコンテンツ提供プログラム

【課題】ユーザのコンテンツに対する反応を容易に取得でき、ユーザ嗜好に合ったコンテンツを提供する。
【解決手段】コンテンツ提供システムは、コンテンツを出力する出力部203と、ユーザの挙動を検出するセンサ212から得られる情報に基づいて、ユーザの挙動の種類を判定する判定部208と、出力部203で出力されたコンテンツに対応する判定部208による判定結果に基づいて、出力部203がさらに出力するコンテンツを決定するコンテンツ選択部209とを備える。
(もっと読む)
マイクロフォンシステム
【課題】音声認識に必要な振動数領域内の固体伝播音及び空気伝播音によるノイズを抑制することが可能なマイクロフォンシステムを提供する。
【解決手段】マイクロフォンシステムは、受音部21が前面側に設けられたマイクロフォン22、及びマイクロフォン22の後面側に取り付けられたウェイト23を有するマイクロフォンユニット20と、音穴11と連通する開口31を有し、マイクロフォンユニット20の前面側と頭部筐体10とにそれぞれ密着して配置される第1柔軟部材30と、頭部筐体10に固定されたケーシング40と、ケーシング40に保持され、マイクロフォンユニット20の後面側に密着して配置される第2柔軟部材50とを備える。
(もっと読む)
術具及びその術具を有する手術支援システム
【課題】より正確に術具の寿命をコントロール可能な術具及びその術具を有する手術支援システムを提供すること。
【解決手段】術具先端部200の内部に、術具先端部200が位置決めアーム部100に装着されたときに通電されるタイマ201を設ける。このタイマ201は、位置決めアーム部100によって通電されたときに術具先端部200の使用時間又は動作回数をカウントする。タイマ201のカウントの結果、術具先端部200が寿命に達した場合にはロック機構201aが動作して術具の動作がロックされる。
(もっと読む)
自律移動サービス提供システム
【課題】券売機等で利用者によるサービス要求の呼出行為に応じて自律移動ロボットが利用者との間の本人照合を通して迅速に対応し、作業効率を高め、かつサービスの品質を高めることができる自律移動サービス提供システムを提供する。
【解決手段】この自律移動サービス提供システムは、所定の位置に居る利用者300の要望に応じて利用者との間で音声会話または表示情報を介して通信を行う手段23,24,26、利用者に係る音声データまたは画像データを取得する手段31,32,33、音声データまたは画像データと利用者の位置データを送信する手段28を備える専用端末200と、位置データに基づいて利用者の居場所までの移動経路を自動生成する手段52、利用者との間で音声会話または表示情報を介した通信に基づき本人照合を行う手段55、利用者の要求する案内サービスを提供する手段52を備える自律移動ロボット400とから構成されている。
(もっと読む)
会話ロボット
【課題】状況に応じた自然な会話を行い得る会話ロボットを提案する。
【解決手段】会話ロボット1では、主注目対象角度θ1及び従注目対象角度θ2を算出し、これら主注目対象角度θ1と従注目対象角度θ2とを全て合算した後、認識したユーザ(ユーザA及びユーザB)の総数で除算して重心方向角度θCG1を算出し、胴体部正面8bをこの重心方向角度θCG1まで回動させる。このように、会話ロボット1では、胴体部正面8bを重心方向角度θCG1まで回動させることで、重心方向に胴体部正面8bを向けさせて、ユーザAだけでなくユーザBに対しても、あたかも注目しているかのような印象を与えることができ、かくしてユーザA又はユーザBとの間で状況に応じた自然な会話を実現し得る。
(もっと読む)
ロボット制御方法、プログラム、及びロボット
【課題】ロボットの自律動作における不自然さを軽減させる。
【解決手段】可動部を有するロボットが、センサから出力される音声データまたは画像データに基づいて、ロボットに対する対話要求を検出し、検出された対話要求を示す検出データに検出の信頼度を含めて出力し、信頼度が所定レベルより高い場合は、検出データに基づいて可動部を動作させ、信頼度が所定レベルより高くない場合は、予め登録された動作データに基づいて可動部を動作させる。
(もっと読む)
ロボットの接触種類判別システム
【課題】簡単な構成で接触の種類を判別することができるロボットの接触種類判別システムを提供する。
【解決手段】本発明に係るロボットの接触種類判別システム100は、ロボット1への接触によって外力が作用する際に、接触の種類を判別する接触種類判別システムである。接触種類判別システム100は、ロボット1に搭載された、外力の力学特性を示す3軸方向以上の成分を検出する第1の検出部110と、第1の検出部110の検出結果に基づいて特徴量を算出する特徴量算出部152と、特徴量と予め接触の種類に対応するように取得したサンプル特徴量とをパターンマッチングし、ロボット1への接触の種類を判別する接触種類判別部153と、を備える。
(もっと読む)
コミュニケーションロボット
【課題】本発明は、簡易な構成で、コミュニケーションが継続しやすいコミュニケーションロボットを提供することを課題とする。
【解決手段】ロボットRは、マイクMCが人物の音声を入力したときに、音声認識の結果の信頼度を出力する音声処理部20と、信頼度に基づいて回答不能行動を行うか否かの評価値として算出し、評価値が予め設定された閾値未満であるときに回答不能行動を行うと判定する応答行動判定手段471と、応答行動判定手段471が回答不能行動を行うと判定した場合、ロボットRが可能な所定の応答行動から、回答不能行動を選択する行動選択手段472と、行動選択手段472が選択した回答不能行動の実行を、スピーカSおよび可動部の少なくとも一方に指令する行動指令手段473と、を備える
(もっと読む)
ロボット装置、ロボット装置の制御方法およびプログラム
【課題】ユーザとロボットの間で対象に関する共同注意の成立を補助可能な、ロボット装置、ロボット装置の制御方法およびプログラムを提供する。
【解決手段】対象Oに関する共同注意の成立をロボット100に促すための指令をユーザ10から取得するコマンド受信部151と、指令の取得に応じて、光束Lの照射により対象を指示するためにユーザにより操作されるポインタ200の位置および姿勢を推定する位置姿勢推定部159と、位置および姿勢の推定結果に基づき、光束の照射により指示されている対象の方向を特定し、方向の特定結果に基づき、周辺環境を表す環境地図EM上で対象を特定する対象特定部160とを備える。
(もっと読む)
ロボット用事故解析システム
【課題】ロボットに発生した事故状態を客観的にとらえることができるロボット用事故解析システムを提供する。
【解決手段】ロボット2に発生した事故状態を再現するロボット用事故解析システムであって、ロボット2に設けられ、自ロボットの稼動状態情報を認識する稼動情報認識部と、ロボットとは別に設けられた撮像手段6によって撮像されたロボット2とその周辺環境との画像データを環境情報として認識する環境情報認識部とを有し、前記稼動状態情報と前記環境情報とを記録するロボット用レコーダ装置3と、ロボット用レコーダ装置3に記録された稼動状態情報及び環境情報に基づいて事故状態を再現するロボット用シミュレータ装置4とを備える。
(もっと読む)
自律移動装置および作業決定方法
【課題】ユーザから提示された物体を認識し、当該物体を用いて実行する作業内容を決定することが可能な自律移動装置を提供する。
【解決手段】本発明の自律移動装置は、所定の作業を行うために動作する動作部と、ユーザからの指示に基づいて、実行する作業を決定する作業決定部と、作業決定部により決定された作業内容に基づいて、動作部の動きを制御する制御部と、を備える。作業決定部は、ユーザから提示された物体を識別するための物体情報を取得する情報取得部と、情報取得部により取得された物体情報に基づいて、物体を識別する物体識別部と、物体と、当該物体を使用して行う作業内容とを関連付けて記憶する作業記憶部と、物体識別部により識別された物体に基づいて、作業記憶部から識別された物体を用いて行う作業内容を決定する決定部と、を備える。
(もっと読む)
仰角方向の音源知覚可能な耳介装置
【構成】 耳介装置(10)は、縦長矩形の平板状基体(12)を含み、基体には、縦長矩形の凹部(14)が形成され、凹部の内側面に、最下段から最上段に向かうにつれて凹部の開口側へ段々にせり出すような、3段の段面(16a-16c)によって階段部(16)が形成される。最下段の段面(16a)の所定位置を観測点とし、そこにマイクロフォン(18)を設けた。
【効果】頭部伝達関数において実際の耳介と同様のピーク/ノッチパターンを確認した。したがって、仰角方向の音源定位が可能であり、そのような耳介装置は簡単な形状、構造である。
(もっと読む)
問題解決システム、問題解決支援装置及び問題解決方法
【課題】知能発達システムに要求される性質を満たす実世界における一般問題解決システムを提供する。
【解決手段】 ロボットと問題解決支援手段とプランナとを備える。問題解決支援手段は、入力層とパターン記憶層とシンボル記憶層とを有し、記号接地フェーズでは、パターン情報の種類に応じた自己増殖型のニューラルネットワークを用いて概念情報が対応付けられたパターン情報を学習し、知識獲得フェーズでは、ロボット自身の行動の前後の実環境でそれぞれ取得したパターン情報から変化前後の環境モデルをそれぞれ取得して、前提条件と削除リストと追加リストとロボットの動作情報とを含むオペレータを生成し、問題解決フェーズでは、タスクの初期状態及び目標状態をプランナに入力してプランニングをし、プランナが出力するプラン中の動作情報に応じた動作をロボットに実行させる。
(もっと読む)
ロボット装置、ロボット装置の行動制御方法及びプログラム
【課題】 学習対象物の共有(共同注意)を可能として、適切に学習対象物を特定することを可能にする。
【解決手段】 ロボット装置は、学習対象物を特定する学習対象物特定手段として機能するセグメンテーション処理部132及び学習対象物検出部133が特定した学習対象物の情報を連想想起記憶部に記憶し、行動制御部により、新たな検出した物と連想想起記憶部に記憶した学習対象物の情報とに基づいて行動をする。
(もっと読む)
触覚提示付ロボット
【課題】 ユーザの状況に応じた多様な情報を擬人的かつ触覚的に提供する。
【解決手段】 触覚提示付ロボット10は、ロボット本体10Aおよびこれをユーザに装着するためのベルト10Bを備える。ロボット本体10Aにはユーザに対して視覚的および聴覚的に作用する視聴覚アクチュエータ(36−56)が、ベルト10Bにはユーザに対して触覚的に作用する触覚アクチュエータ(74−78)が設けられ、そしてユーザの位置,動き,環境,バイタルサインなどを検知するセンサ(62−70,80)がロボット本体10Aおよびベルト10Bに設けられる。コンピュータ(30)は、ユーザの状況をセンサで検知し(S3−S21)、状況に応じた情報をユーザに対して視聴覚アクチュエータおよび触覚アクチュエータで擬人的かつ触覚的に提示する(S25−S33,S37−S41)。
(もっと読む)
自律移動ロボット
【課題】人の移動したい方向が不明な場合でも、自律移動ロボットの適切な移動を実現する。
【解決手段】動作決定部80及び走行制御部66は、音声認識部56の認識結果に基づいて人が自律移動ロボットを退かそうとしているか否かを判定するとともに、人物検出部60と顔検出部52の検出結果に基づいて人が移動したい方向を判定する。この判定の結果、人に自律移動ロボットを退かそうとする意志があるが移動したい方向が不明と判定された場合には、自律移動ロボットを、人から離れる方向に移動させ、自律移動ロボットが人から離れる方向に移動した後に人が動いた方向に基づいて、自律移動ロボットを人から離れる方向に移動する。
(もっと読む)
ロボット、及び収音装置
【課題】高いS/N比で収音することができるロボット、及び収音装置を提供すること。
【解決手段】本発明の一態様にかかる収音装置は、マイクユニットが、第1の仮想直線L1上に配列されたマイクからなる第1のチャネルCH1と、第2の仮想直線L2上に配列されたマイクからなる第2のチャネルCH2と、第3の仮想直線L3上に配列されたマイクからなる第3のチャネルCH3と、マイクユニットが取得する音の音源の方位に応じて、第1乃至第3のチャネルL1〜L3を使い分ける手段と、を備える。第1の仮想直線L1と第2の仮想直線L2とは、第1のチャネルCH1の1つのマイクの中心点で交差する。第2の仮想直線L2と第3の仮想直線L3とは、第2のチャネルCH2の1つのマイクの中心点で交差する。第3の仮想直線L3と第1の仮想直線L1とは、第3のチャネルCH3の1つのマイクの中心点で交差する。
(もっと読む)
ロボット用ドライブレコーダ装置
【課題】 ロボットに係る情報を記録し、事故発生時における事故原因の究明に有効な情報を記録する「ロボット用ドライブレコーダ装置」を提供する。
【解決手段】 ロボット用ドライブレコーダ装置1は、自ロボットの稼動時の周辺環境を撮像するカメラ5、マイクロフォン6、ロボットセンサ4、各データを記録する記録装置9と、自ロボットに接近或いは接触する物体を検出しその検出結果から異常状態にあるか否かを判断するCPU2と、ネットワーク11を介して外部データベース12に通信可能な通信部10とを備え、CPU2が異常状態であると判断したときは、記録装置9に記録された各種データを通信部10によって外部データベース11に送信するものである。
(もっと読む)
ロボット装置
【課題】予め定められた状況以外の状況においてもユーザに対して適切な情報を提供することが可能なロボット装置を提供すること。
【解決手段】ロボット装置100は、状況情報取得部101と自律動作条件判定部102と自律動作部103と通信実行部104とを備える。状況情報取得部101は、周囲の状況を表す状況情報を取得する。自律動作条件判定部102は、状況情報取得部101により取得された状況情報に基づいて所定の自律動作条件が成立しているか否かを判定する。自律動作部103は、自律動作条件判定部102により自律動作条件が成立していると判定された場合、予め定められた動作を行う。通信実行部104は、自律動作条件判定部102により自律動作条件が成立していないと判定された場合、所定の通信先装置との間で通信を行う。
(もっと読む)
1 - 20 / 227
[ Back to top ]