
Fターム[3C007LU04]の内容
マニピュレータ、ロボット (46,145) | 速度、力、ハイブリッド制御 (451) | 速度制御 (170) | 速度パターンを用いるもの (12)
Fターム[3C007LU04]に分類される特許
1 - 12 / 12
ロボット制御装置、ロボットシステム、及びロボット制御方法
【課題】ロボットに取り付けられたエンドエフェクターとコンベヤー上のワークとの衝突を抑制することのできるロボット制御装置、該装置を備えるロボットシステム、及びロボット制御方法を提供する。
【解決手段】ロボットコントローラー10は、エンドエフェクターがワークの上方に移動する際に、該ワークの位置の上方にエンドエフェクターが到達するために必要な水平動作時間を算出する水平動作時間算出部15aと、エンドエフェクターの速度とワークの速度とが同調するために必要な追従動作時間とを算出する追従動作時間算出部14と、エンドエフェクターがワークの上方に到達する前に、水平動作時間と追従動作時間とを比較してエンドエフェクターの下降の終了時を設定する下降設定部16とを有する。下降設定部16は、水平動作時間が追従動作時間よりも短い場合、エンドエフェクターの移動の開始時から追従動作時間の経過時以降を下降の終了時とする。
(もっと読む)
ロボット制御装置

【課題】モーターの性能をより多く引き出すことが可能なロボット制御装置。
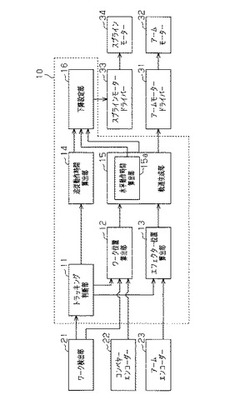
【解決手段】モーターパラメーター記憶手段40と、慣性モーメント計算手段10と、移動距離計算手段20と、速度指令曲線計算手段30と、速度指令曲線計算手段30により生成された速度指令曲線に従ってモーター72を制御するモーター制御装置60と、を備えるロボット制御装置75であって、モーター72の内部温度を測定するモーター温度測定手段50をさらに備えており、モーターパラメーター記憶手段40は、内部温度によって変動する可変パラメーターについては許容最大値よりも低い内部温度下で使用された場合の増大する方向に補正されたモーターパラメーターを含めて記憶しており、速度指令曲線計算手段30は、補正されたモーターパラメーターを用いて速度指令曲線310を生成するロボット制御装置75。
(もっと読む)
液体搬送装置
【課題】液体を溢すことなく搬送し得る液体搬送装置を提供する。
【解決手段】液体搬送装置10は、液体を収容して、X−Y−Z直交座標上の始点Oから終点Pまで該液体を搬送するスプーン14と、スプーン14を支持して、スプーン14を移動させるアーム部26,30,34と、アーム部26,30,34を駆動する駆動部と、収容部14の搬送軌道CにおけるX−Y座標成分CX−Yが直線となるよう駆動部を制御する制御部18とを備える。制御部18は、スプーン14の搬送速度カーブにおけるX−Y座標成分が、加速段階と、等速段階と、減速段階とで構成されるよう前記駆動部を制御する。加速カーブSおよび減速カーブTは、加速時または減速時に液体に作用する作用力がスプーン14に満たされた液体の表面張力より小さくなるよう設定される。
(もっと読む)
ロボットの動作制御装置及びその動作制御方法
【課題】ロボットのの動的精度を向上させ、ティーチングに要する時間を短縮する
【解決手段】ロボット2の動作を制御する制御装置3は、軸毎に指令値に対する目標軌跡と実際の動作軌跡との差をサーボ遅れ時間として計算し、その計算した軸毎のサーボ遅れ時間を比較して軸毎のサーボ遅れ時間が複数の軸の全てで一致するように基準時間を決定し、その計算した軸毎のサーボ遅れ時間と当該決定した基準時間とに基づいて軸毎の補償トルクを計算し、その計算した軸毎の補償トルクを反映した指令値を各サーボに出力してロボット2の動作を制御する。
(もっと読む)
ロボット制御システム
【課題】ロボットを予め教示されたルートに従って移動制御するロボット制御システムにおいて、常に2点間(開始点から目標点)のみの移動時間にて制御する。
【解決手段】目標ルートsと、目標時間Tと、教示ルートkと、前記教示ルートkに従い移動するロボット1と、からなるロボット制御システム100において、前記それぞれの教示点k(n)からの前記目標ルートsに対する垂線の足であるシフト教示点s(n)と、前記目標ルートsを、それぞれのシフト教示点s(n)によって区画するそれぞれの目標セクション[s(n)]と、前記目標ルートsを前記目標時間Tで等速移動する場合の前記それぞれの目標セクション[s(n)]のセクション目標時間t(n)と、を備え、前記ロボットは、前記それぞれの教示セクション[k(n)]上を、対応するセクション目標時間t(n)にて移動するロボット制御システム100。
(もっと読む)
ロボットの加減速パターン生成方法
【課題】ロボットの固有振動数を各関節部のバネ定数とアームの慣性モーメントとから時々刻々と導き、リアルタイムで振動を抑制する加減速パターンを生成する。
【解決手段】 各々がサーボモータ14により駆動される関節によって結合された複数のアームからなるロボットの加減速パターン生成方法において、アームのうち少なくとも1つに関し、所定の時間間隔ごとにサーボモータ14によって動作するアームの慣性モーメントを算出し、関節の駆動系におけるバネ系要素のバネ定数と慣性モーメントとからアームの固有振動数を求め、加減速パターンの加速時間および減速時間を固有振動数の逆数である固有振動周期の整数倍とする。
(もっと読む)
搬送ロボット及び搬送プログラム
【課題】コップなどの容器に液体が入っていることを自動で検出し、容器を水平状態に維持する制御を行って搬送する搬送ロボットを提供する。
【解決手段】搬送する容器8の傾きを調節する傾動手段16と、容器8を搬送する際に要求される搬送姿勢情報を取得する搬送姿勢情報取得手段50と、搬送姿勢情報に水平状態を維持する旨の情報が含まれている場合には傾動手段16に対して容器を水平状態に維持する制御指令を出力する姿勢制御手段82と、容器8の内容物7が流動物であると検知した場合には容器8を水平状態に維持する旨の搬送姿勢情報を生成する流動物検知手段80と、傾動手段16が持ち上げた容器を搬送する搬送手段14とを備えた。
(もっと読む)
成形品取出機のチャック制振方法
【課題】チャックの移動停止時に、少なくともチャックの振動周期及び振幅を検出し、該データに基づいてチャックの移動を制御することによりチャックの移動停止時における振動を確実に制振する。検出された振幅データに基づいて移動停止時におけるチャックの振動強度を確認する。
【解決手段】少なくともチャック17の移動停止時に振動検出器25からの信号に基づいてチャック17の振動周期及び振幅を検出してチャックの移動制御手段19に出力し、検出されたチャック振動の周期データ及び振幅データに基づいてチャック17を移動制御してチャック移動停止時における振動を制振すると共に振幅データにより振動強度を確認可能にする。
(もっと読む)
塗布ロボット
【課題】 部品の表面あるいは裏面に塗料、接着剤あるいはシール剤を塗布する塗布ロボットを提供する。
【解決手段】 モータにより駆動されて塗布剤の瞬時吐出量を制御する塗布装置5をロボット先端に取付けるとともに、塗布開始ポイントから塗布終了ポイントまでのロボット先端の速度パターンに沿って塗布剤の瞬時吐出量を制御するように構成する一方、塗布装置5の高さ位置のオフセット量を記憶しておき、塗布装置5の先端と塗布剤の上面との間隔が所定間隔となるように塗布装置5の高さ位置を補正するように構成されている。そのため、ロボットの速度が変わったり、塗布剤の最大瞬間吐出量が変わって、塗布剤の高さが変わっても、塗布剤の塗布状態を常にきれいに保持できる。
(もっと読む)
ロボット制御装置および制御方法
【課題】 衝撃や振動を抑えるとともに、タクトタイムが増加しない、直交座標系での精度が低下しない、指令速度を守るというような用途に合った動きを実現することができるロボット制御装置を提供する。
【解決手段】 作業指令から直交座標系運動指令を生成して、電動機へのトルク指令を生成するロボット制御装置において、制御シミュレーションを行うシミュレーション演算部と、前記シミュレーション演算部にて演算された内部の状態量を評価する状態量評価部と、前記状態量評価部にて評価された結果に基づき速度や加減速時間などの運動指令生成のためのパラメータを調整するパラメータ調整部とを備える。
(もっと読む)
全方向移動ロボット
【課題】装備が簡素であり、初期位置および姿勢から目標位置および目標姿勢に向かう動作が自然な印象を与える全方向移動ロボットを提供する。
【解決手段】
全方向移動ロボット1が指令された目標位置Bおよび目標ロボット前面方向8bに移動する際に、初期位置A付近にて全方向移動ロボット1を目標位置Bへ並進させながら、ロボット前面が初期位置Aから目標位置Bへ向かうベクトルと同一方向に向くように回転させ、目標位置B付近にて全方向移動ロボット1を目標位置Bへ並進させながら、ロボット前面が目標ロボット前面方向8bと同一方向に向くよう回転させる。
(もっと読む)
アニマトロニクス・フィギュアの現実的な動作を生成する計算環境
アニマトロニクス・フィギュアの動作を生成するシステムを開示する。このシステム(200)は、異なる種類の動作をリアルタイムで生き物のように生成すべく構成されている。動作ソフトウェアモジュール(106)は、ユーザ入力の動作を、ユーザが選択した固定の動作列及び/またはアルゴリズム的に計算した動作と組み合わせることによって合成動作を形成する。アニマトロニクス・フィギュアの動作をさらにフィルタ処理して、生き物のような動きを生成する。組合せ動作は、要素動作を重ね合わせ、変化させ、あるいは修正することによって形成される。ユーザ入力コマンド及び刺激から決まるコマンドに基づいて動作をフィルタ処理して、生き物のような動きを生成する。 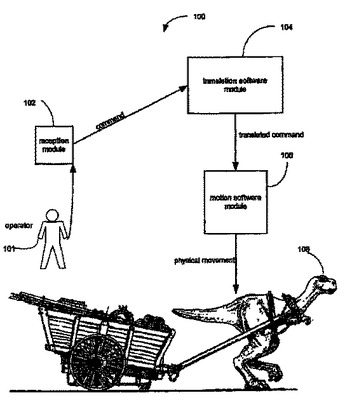 (もっと読む)
(もっと読む)
1 - 12 / 12
[ Back to top ]