
Fターム[3C007LU09]の内容
マニピュレータ、ロボット (46,145) | 速度、力、ハイブリッド制御 (451) | 制御パラメータが複数あるもの、ハイブリッド制御 (54)
Fターム[3C007LU09]の下位に属するFターム
制御パラメータを切り替えるもの (14)
Fターム[3C007LU09]に分類される特許
1 - 20 / 40
ロボット制御装置
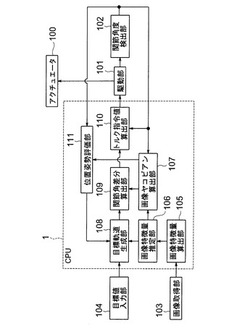
【課題】ロボットのハードウェア制限条件を考慮しながら、安定したビジュアルフィードバック制御を提供する。
【解決手段】カメラで撮影された画像から対象物の特徴を表す画像特徴量を算出する画像特徴量算出部105と、画像特徴量の変化と前記関節角の変化の割合である画像ヤコビアンを算出する画像ヤコビアン算出部107と、設定された目標値と前記画像特徴量とを用いて、ロボットの制御周期毎の画像上の目標軌道を生成する目標軌道生成部108とを備える。
(もっと読む)
ロボット装置

【課題】2つのリンクの長さが異なっても、迅速にスティフネス特性を示す楕円を求める。
【解決手段】記憶部4には、第1の剛性指令値U1を求める第1の演算式、第2の剛性指令値U2を求める第2の演算式及び第3の剛性指令値U3を求める第3の演算式が記憶されている。各演算式は、スティフネス楕円の短軸及び長軸のうちの一方の軸が、直交座標系のx軸に平行となる条件での連立方程式を各剛性指令値について解くことにより導き出したものである。減算部3は、第1の揺動角度の値θ1*から目標標傾斜角度の値φ*を減算した値を新たな第1の揺動角度値θ1*’としている。そして、演算部2は、各演算式に、各値を代入する際に、第1の揺動角度値θ1*’を代入して、スティフネス楕円の軸が目標標傾斜角度の値φ*傾いた各剛性指令値U1,U2,U3を求める。
(もっと読む)
多自由度位置決め装置および多自由度位置決め方法
【課題】簡易な構成で、エンドプレートおよびツールや治具の重量を支えることができ、また、駆動電流による発熱を抑制し、作業を行う際の駆動力を確保する。
【解決手段】ベースプレート2とエンドプレート4との間に接続された複数のリンク3と、各リンク3に取り付けられ、リンク3を駆動させるアクチュエータ6と、ベースプレート2とエンドプレート4との間に接続され、定常位置でのエンドプレート4およびエンドプレート4に取り付けられた物体の重量を支える重力補償装置5とを備えた。
(もっと読む)
位置および姿勢の補正機構
【課題】高速に動作可能である、位置および姿勢の補正機構を提供する。
【解決手段】減速機を介さない複数のリニアモータ101A〜Fの組み合わせによって構成されるリンク機構と、複数のリニアモータ101A〜Fのそれぞれの位置を測定するリニアエンコーダ120A〜Fと、複数のリニアモータ101A〜Fのそれぞれに流れる電流値を測定する電流センサ110A〜Fと、リニアエンコーダ120A〜Fにより測定された上記位置および電流センサ110A〜Fにより測定された電流値が入力される制御部130とを備えている。制御部130は、算出された上記力と入力された複数のリニアエンコーダ120A〜Fのそれぞれの位置に基づいて、リンク機構の位置および駆動力を制御するリンク機構駆動指令部140を含む。
(もっと読む)
ロボット、及びその制御方法
【課題】被誘導者を適切に誘導することができるロボット、及びその制御方法を提供すること。
【解決手段】本発明の一態様にかかるロボットは、ハンドを有する腕部と、脚部と、胴体部と、を有し、人201を誘導して移動するロボットであって、所定のロボット位置におけるハンドの目標位置とハンドの測定位置との偏差に応じて、ロボットに対する被誘導者の追従状態を推定する追従状態推定部136と、追従状態の推定結果に応じて、ロボットの移動速度を調整する歩行調整部137と、歩行調整部137によって調整された移動速度に応じて前記ロボットを移動させるよう、脚部を駆動する駆動制御部138と、を備えたものである。
(もっと読む)
力制御装置
【課題】動作中に力制限値とコンプライアンス制御パラメータを切替えることで作業を高速化しながら位置ずれ発生時に過大な力が作用するのを防止した力制御装置を提供する。
【解決手段】切替地点指定手段5からのロボットに行わせる作業動作に従ったロボット先端に作用する力の力制限値およびコンプライアンス制御の力制御パラメータの少なくとも一方を含むパラメータ条件、および上記パラメータ条件に切り替える切替地点を指示する命令に基づいて、パラメータ切替手段6が力制限値および力制御パラメータの少なくとも一方を切り替え、力制限超過判別手段4が力制限値を超える力が作用していると判別した場合に、ロボットに行わせる作業動作に従ってロボットの目標位置を示す位置指令を出力する指令生成手段1にロボットを減速停止させる位置指令を出力させる停止指令を入力する。
(もっと読む)
ロボットアームの制御装置及び制御方法、ロボット、ロボットアームの制御プログラム、及び、ロボットアーム制御用集積電子回路
【課題】予測できない環境の変動があっても、作業者が簡単で短時間にロボットアームの教示を行うことが可能なロボット制御を実現することができる、ロボットアームの制御装置及び制御方法、ロボット、ロボットアームの制御プログラム、及び、ロボットアーム制御用集積電子回路を提供する。
【解決手段】動作情報データベース17に記憶されたロボットアーム5の動作情報を取得し、人4Aがロボットアームを操作してその動作補正時の補正動作情報を取得し、環境情報を取得部19で取得し、ロボットアームが動作中に動作情報を動作補正部20で補正し、補正された動作情報と取得した環境情報とにより、ロボットアームが自動で動作するための制御ルールを制御ルール生成部23で生成し、生成された制御ルールに基づいてロボットアームの動作を制御する。
(もっと読む)
高速高精度な接触作業に適用するロボット制御システム、ロボット制御方法、ロボット制御装置、およびプログラム
【課題】 高速高精度な接触作業に適用するロボット制御システム、ロボット制御方法、ロボット制御装置、およびプログラムを提供すること。
【解決手段】制御装置600は、ロボットのワークの位置、姿勢、力制御値、およびモーメント制御値についての目標値を取得して格納する目標値格納部626と、目標位置および目標姿勢を読出し、切換え行列を適用して力を反映させ、さらに滑り摩擦や慣性力などの外力の除去を含む位置姿勢制御部628とを含み、自由空間と、拘束空間との間の制御力・運動の非干渉化を含む位置姿勢制御部628および力・モーメント制御部630とによって制御出力統合部634からロボットの関節に対する制御信号を生成させている。これらによって,高速高精度なロボットアームの点接触、線接触、面接触のすべての接触作業に適用する位置、姿勢、力及びモーメントの制御技術を提供する。
(もっと読む)
マニピュレータの制御方法および制御装置
【課題】挙動の改善されたマニピュレータを提供すること。
【解決手段】本発明による多軸マニピュレータ、とりわけロボット(1)の制御方法は、1つの案内軸をコンプライアンス制御する段階(S50)と、別の軸を剛性制御する段階(S50)とを含み、上記の別の軸の目標値(q2s、q5s)が、案内軸の実際値(q3mess)に基づいて決定される。
(もっと読む)
多脚歩行式移動装置のハイブリッド制御装置及び手法
【課題】不整地のような未知の環境においても、任意の脚部制御とオートバランス制御とのそれぞれを同時に実行可能とする。
【解決手段】複数の脚で歩行する多脚歩行式移動装置において、任意の脚部制御と、バランス維持を自動で行なうためのオートバランス制御とを同時に実行するハイブリッド制御装置を備え、ハイブリッド制御装置は、足部の接地状態に応じて脚部制御とオートバランス制御との非干渉化を静力学的に行なう。
(もっと読む)
ロボット及びハンドの制御情報を確定するためのマスタ・スレーブ装置及び制御情報確定方法
【課題】 ロボットに人の器用さを実装するためのタスクスキルをモデル化し、タスクスキルを生成するための制御方式を定義し、タスクスキルに必要な制御パラメータを抽出し、タスクスキル動作手順を抽出し、対象作業に適したタスクスキルの生成を実現する。
【解決手段】 インピーダンスと力のハイブリッド制御を利用したタスクスキル生成装置1及びインピーダンス制御を利用したタスクスキル生成装置1を利用して、操作者が対象作業を動作入力・提示装置12と力センサ13を使ってスレーブ装置11のロボット2を遠隔操作し、その遠隔操作結果からタスクスキル生成に必要なタスクスキル動作手順、タスクスキルのモデルに基づいた初期条件、タスクスキル動作(インピーダンスと力のハイブリッド制御のパラメータ、インピーダンス制御のパラメータ)、終了条件を抽出する。
(もっと読む)
多優先作動空間インピーダンス制御
【課題】組立て作業ロボットに有用な制御方式を提供すること。
【解決手段】ロボットマニピュレータの多優先インピーダンス制御を提供するためのシステムと方法であって、複数のインピーダンス法則が同時に且つ所与の優先順位で実現されるようにしたシステムと方法である。本方法は、デカルト空間インピーダンス目標を第1優先として実現し、なお且つ関節空間インピーダンス目標を第2優先として実現するための制御スキームを含んでいる。本方法は、更に、異なる優先順位を持つ2つのデカルト空間インピーダンス目標を実現するための制御スキームを含んでいる。本方法は、エンドエフェクタに取り付けられた力センサーからのフィードバックを使用する制御スキームのインスタンスと、同フィードバックを使用しない他の制御スキームのインスタンスを含んでいる。
(もっと読む)
ロボットマニピュレーターの制御装置及びその制御方法
【課題】 マニピュレーターの関節加速度を利用しなくても、マニピュレーターに作用する外乱トルクを正確に推定できるロボットマニピュレーターの制御装置及びその制御方法を提供する。
【解決手段】 マニピュレーターの関節位置と関節トルクを感知する感知器と、前記感知された関節位置と関節トルクを入力とする前記マニピュレーターに対する状態空間方程式を用いて外乱トルクを推定する外乱推定器と、前記推定された外乱トルクに基づいて前記マニピュレーターを制御する制御器とを含んでロボットマニピュレーターの制御装置を構成する。
(もっと読む)
ロボット制御装置、ロボット制御方法およびロボット制御プログラム
【課題】スイング脚が障害物を検出した段階で重心がスイング脚にある場合にもロボットを転倒させることなく安定状態に戻すこと。
【解決手段】反射制御部123dが、障害物を検知すると、支持脚へのローリング動作とスイング脚を元の安定位置に戻すだけでなく、コンプライアンス制御のゲインの符号を短時間反転してスイング脚を伸ばすとともに、スイング脚を伸ばした分だけ支持脚を曲げるように制御する。また、障害物の検知後ロボットが安定状態になると、反射制御部123dは、足裏を前後左右に動かして歩行の継続を可能とする安定面を探し、安定面がある場合には、安定面上を歩行するよう制御する。また、ロボットが安定面上を歩行する場合に、反射制御部123dは、静的な制御下で歩行を制御する。
(もっと読む)
アクチュエータおよびロボット
【課題】外力に応じたリンクの動きのコンプライアンス性を、環境や用途に鑑みて適切に調節することができるアクチュエータ等を提供する。
【解決手段】本発明のアクチュエータ2によれば、目標リンク角速度ω1と目標従動角速度ω2との合成結果としての目標モータ角速度ω0に基づいて駆動指令角速度ωCが設定される。合成目標速度ω0に目標リンク角速度ω1の成分が含まれることによりリンク24の動きに「硬さ」を持たせる一方、合成目標速度ω0に目標従動角速度ω2の成分が含まれることによりリンク24の動きに「柔らかさ」を持たせることができる。したがって、目標リンク角速度ω1と目標従動角速度ω2との合成比率Kfが調節されることにより、リンク24の動きの硬さおよび柔らかさのバランスが調節される。
(もっと読む)
車輪付脚式移動装置
【課題】車輪走行時に路面の凹凸があっても胴体部に衝撃が伝わらないようにするとともに脚制御時にも容易に安定化制御をすることができ,加減速時や旋回時にも横方向の力を受けないようにすることができ,その結果,人や荷物の搬送用途にも使用できるようにする。
【解決手段】車輪走行時に脚が仮想的なバネおよびダンパとなるように制御する。
(もっと読む)
ロボット装置及びロボット装置の制御方法
【課題】物体に衝突する際に位置制御と力制御の切り替えを円滑に行なう。
【解決手段】把持する物体の位置情報や形状情報が正確でないと、把持の失敗、把持対象物の転倒や破壊などの可能性がある。ロボット装置は、加速度制御をベースとして位置制御を行ない、指先や手先が物体に接触したときには、位置指令値を満足することよりも、大きな衝撃力を加えないことを優先する。また、指先や手先が物体などの外界と接触した直後から接触力を正確に加えることができ、把持や操作の計画が立て易い。位置制御中に物体と衝突しても所定値を超える接触力は発生せず、衝突した直後から与えられた接触力を追従する。
(もっと読む)
組立て用ロボットハンド
【課題】 コンプライアンス作用の中心位置およびコンプライアンスの大きさを任意に変更可能で、かつ受動的な動作で、複雑な計算を必要としない組立て用ロボットハンドを提供することである。
【解決手段】 一つの中心線12に対して線対称に配置され、かつ、この中心線と直角をなす複数個の遥動軸の周りに前記中心線と重なる複数個の平面上に遥動可能な複数個のチャック爪13と、複数個の遥動軸の中心位置を前記一つの中心線と略直角をなす方向に移動させる手段と、複数個のチャック爪の先端部に力を負荷する複数個の手段とから構成され、複数個の遥動軸の位置および先端部に負荷される力の大きさを変化させることにより、軸状部材のコンプライアンス作用の中心位置およびコンプライアンスの大きさを調整できるようにしたことを特徴とする組立て用ロボットハンド。
(もっと読む)
ダイレクト操作装置および配電作業用ロボット
【課題】操作棒に無理な力が作用することなく、操作棒の作用力に倣う方向を維持したまま並進方向の操作力を正確に力センサに伝達することが可能となり、実際の配電作業での適用に耐える安全性の高いダイレクト操作装置を提供する。
【解決手段】ダイレクト操作装置2を、基部20と、基部20に固定された複数の雄コネクタ21と、雄コネクタ21のいずれか1個に接続固定される雌コネクタ22とから構成し、雌コネクタ22が雄コネクタ21の接続を検知する圧電スイッチを内蔵した接合部と、接合部に設けられる力センサ部と、力センサ部を介して立設された少なくとも2自由度の回転機構を備えたフック部とを備え、力センサ部がフック部の引き回しによる力を検知して制御装置10へ出力するようにした。
(もっと読む)
嵌合装置
【課題】姿勢を正常な姿勢から遠ざけずに、第一嵌合部材を第二嵌合部材に嵌合する。
【解決手段】ロボットアーム(2)の先端に取付けられたハンド(4)により把持される第一の嵌合部材を対応する第二の嵌合部材に嵌合させる嵌合装置(10)は、第一および第二の嵌合部材が当接したときに発生する力を検出する検出手段(3)と、検出手段により検出された力に基づいて、これら嵌合部材が一点で当接している一点当接状態であるか、またはこれら嵌合部材が少なくとも二点で当接している二点当接状態であるかを判断する判断手段(12)と、を具備する。一点当接状態である場合には、ロボットアームの把持姿勢を保持した状態で、ハンドに把持される第一の嵌合部材を第二の嵌合部材に嵌合方向に押付けて嵌合作用を進行させ、二点当接状態である場合には、ロボットアームの把持姿勢を変更可能な状態で、嵌合作用をさらに進行させる。
(もっと読む)
1 - 20 / 40
[ Back to top ]