
Fターム[3C007LV03]の内容
マニピュレータ、ロボット (46,145) | その他の各種制御 (1,668) | エンドエフェクターの制御 (521)
Fターム[3C007LV03]の下位に属するFターム
Fターム[3C007LV03]に分類される特許
21 - 22 / 22
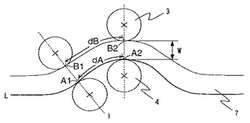
ロボット・シーム溶接方法および装置
【課題】比較的簡単な構成で、湾曲した溶接部位の割れなどを確実に防止することのできるロボット・シーム溶接方法と装置の提供。
【解決手段】ロボット・シーム溶接方法は、多関節ロボット1に搭載した一対の電極輪3,4で被溶接物7を挟み、これら電極輪を回転させるとともに、予め教示された被溶接物の溶接線L上の位置をロボットに周期的に指令して電極輪をこの溶接線に沿って移動させながら溶接電流を通して被溶接物のシーム溶接を行う。この方法では、周期的に算出する指令位置A1,A2,B1,B2に基づいて被溶接物上の各電極輪の移動距離dA,dBを求め、この移動距離に見合う速度で当該電極輪を回転させる。
(もっと読む)
スポット溶接用ロボットシステム

【課題】多関節汎用ロボットなどを利用して、高精度、高品質のスポット溶接の自動化を図る。
【解決手段】多関節汎用ロボット1などに取り付けられ且つスポット溶接用チップ11,13の開閉駆動源として電動式サーボモーター14を備えたスポット溶接用ガンユニット9と、ロボット制御装置17、溶接電流制御部29、及び主制御装置19を備え、この主制御装置19は、前記モーター14を制御するチップ駆動プログラム28と溶接電流制御部29を制御する溶接電流制御プログラム27、及びこれら両プログラム27,28に対して時間情報を与える両プログラム共通の1つのタイマー25を備え、スポット溶接用チップ11,13の開閉駆動とその間の溶接電流の制御とが共通の時間軸上で両プログラム27,28に従って実行される構成。
(もっと読む)
21 - 22 / 22
[ Back to top ]