
Fターム[3C007LV05]の内容
マニピュレータ、ロボット (46,145) | その他の各種制御 (1,668) | エンドエフェクターの制御 (521) | 姿勢制御 (94)
Fターム[3C007LV05]に分類される特許
1 - 20 / 94
ロボットシステム
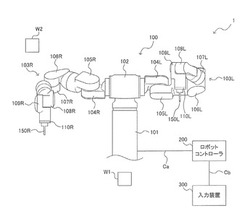
【課題】対象物を固定しつつ旋回が必要となる作業を1台のロボットで行うことができるようにする。
【解決手段】ロボットシステム1は、ロボット100と、このロボット100の動作を制御するロボットコントローラ200とを備えている。ロボット100は、先端にツール150L,150Rを備えた2つのアーム103L,103Rと、これら2つのアーム103L,103Rを支持し、旋回させる胴体部120とを有している。ロボットコントローラ200は、2つのアーム103L,103Rのうち、少なくとも1つのアーム103の先端に備えられたツール150が旋回の前後を通じて同一の位置及び姿勢に保持されるように、ロボット100を制御する。
(もっと読む)
ロボット制御装置、物品取り出しシステム、プログラムおよびロボットの制御方法

【課題】 物品の姿勢がランダムであっても、ロボットを用いて取り出し部位を把持して、物品を取り出す。
【解決手段】 複数の取り出し部位を備える物品の位置・姿勢情報に基づいて、前記複数の取り出し部位にそれぞれ設定された把持方向のうち、所定の方向となす角度が最小となる把持方向を選択方向として選択する方向選択部と、前記複数の取り出し部位のうち、前記把持方向として前記選択方向が設定された取り出し部位を把持して前記物品を取り出すようにロボットを制御する制御部と、を有する。
(もっと読む)
棒状部材の搬送装置
【課題】複雑な機構を利用せずに、ランダムに配置された棒状部材を逐次的に効率よく取出し、取出した棒状部材を所定の場所に搬送することができる搬送装置の提供。
【解決手段】吸引装置18は、ロボットハンド22に取付けられたノズル24を有し、取出し対象の棒状部材14aの第1の円柱状部分30の端部にノズル24を接近させ、第1の円柱状部分30をノズル24内に吸引しながら、ノズル24を上昇させて棒状部材14aを保持するように構成されている。
(もっと読む)
ワークピッキングシステム
【課題】把持対象となるワークの姿勢に関わらず、ワークの把持姿勢を一定に保つこと。
【解決手段】把持対象であるワークの3次元形状を計測する3次元計測部10と、多軸ロボット30の終端可動部に設けられ、把持爪の間隔を変更する機構および把持爪の先端向きを変更する機構を含むハンド20とを備えるようにワークピッキングシステム1を構成する。また、3次元計測部によって計測された3次元形状に基づいてワークの姿勢を算出する算出部41bと、算出部によって算出されたワークの姿勢および終端可動部の回転軸の方向に基づいて把持爪の先端向きを決定する決定部41cと、終端可動部の回転軸の向きおよび決定部によって決定された把持爪の先端向きを保持しつつワークを把持する動作を指示する指示部41dとを備えるようにワークピッキングシステムを構成する。
(もっと読む)
アーク溶接ロボット制御装置
【課題】
アーク溶接ロボットにおいてトーチ姿勢の教示が煩雑である。
【解決手段】
ロボット制御装置RCは、トーチTの姿勢を規定するトーチ姿勢ファイルを作成するCPUと記憶部を備える。トーチ姿勢ファイルは、溶接線上の教示点または溶接開始命令の1パラメータとして設定される。ロボット制御装置RCは、作業プログラムを再生する際、トーチ姿勢ファイルが設定された教示点、またはトーチ姿勢ファイルが設定された溶接開始命令が有効となる教示点におけるトーチ姿勢を算出する。角度パラメータを、作業プログラムとは別のファイルとすることで、一度教示したトーチ姿勢の再利用を可能とすると共に修正も容易となる。
(もっと読む)
ティーチングデータ作成方法およびティーチングデータ作成装置
【課題】所定の製造ラインで作業される新たなワークに対し、この製造ラインの特性を考慮したティーチングデータを効率的に作成することを可能にする多関節ロボットのティーチングデータ作成方法およびティーチングデータ作成装置を提供すること。
【解決手段】ワークに設定された複数の作業点のそれぞれでエンドエフェクタにより作業を行う多関節ロボットのティーチングデータ作成方法において、ティーチングデータ供給対象の多関節ロボットが前記作業点のそれぞれに対して作業するときのエンドエフェクタの各姿勢の制御データを取得し(ステップS3)、制御データの中から、ティーチングデータ作成対象のワークに設定された作業点にほぼ一致する作業点を特定し(ステップS7)、当該作業点での前記エンドエフェクタの姿勢の制御データに基づいて前記ティーチングデータを作成する(ステップS9)ことを特徴とする。
(もっと読む)
ロボット及びその制御方法
【課題】経路計画の計算量を低減することができるロボット及びその制御方法を提供すること。
【解決手段】本発明にかかるロボット1の制御方法は、認識部21と、記憶部22と、ハンド部133が設けられたアーム13と、を備え、周囲に障害物91が存在する対象物90にハンド部133を接近させるようにアーム13の動きを制御するロボットの制御方法である。ロボット1は、認識部21により、対象物90の位置情報と、障害物91の固有の情報と、を取得する。ロボット1は、障害物91の固有の情報に対応して記憶部22に予め格納され、ハンド部133が障害物91を回避して対象物90に向かう軌道に関する軌道情報を取得する。そして、ロボット1は、軌道情報に基づいて、アーム13の動きを制御する。
(もっと読む)
ワーク搬送装置およびワーク搬送方法
【課題】台車の側壁に隣接するワークが傾いている場合でも、そのワークを把持部で確実に把持することができるワーク搬送装置およびワーク搬送方法を提供する。
【解決手段】ワーク用ハンド部220の把持部221の中心部が、回動部112の回転軸Oから第1アーム部211の他端部に向けて延在する中心軸線Pから所定間隔Lをおいて配置されている。把持部221の中心線Rと第1アーム部211の中心軸線Pとの間隔Lを適宜設定することにより、第1アーム部211および第2アーム部212と台車Dの側壁D1との間の間隔を大きく設定することができる。図4に示すように、台車Dの側壁D1に隣接するワークWの姿勢が傾いている場合、第1アーム部211および第2アーム部212を台車Dの側壁D1に対して傾斜させても、第1アーム部211および第2アーム部212は台車Dの側壁D1と干渉しない。
(もっと読む)
ロボットシステムまたはロボット制御装置
【課題】冗長な自由度を有するマニピュレータをより最適に制御することができるようにしたロボットシステム及びロボット制御装置を提供する。
【解決手段】1以上のアクチュエータを有するマニピュレータ2とこれを制御するコントローラ3とを有し、コントローラ3は、アクチュエータの内の一部を冗長軸と設定し、マニピュレータの目標位置姿勢を設定し、マニピュレータが現在の姿勢から目標位置姿勢に達するまでの動作軌跡を生成し、マニピュレータの到達可能範囲内の領域を分割して設定した小領域と各小領域に対応する冗長軸角度用パラメータとを対応付けた冗長角度定義テーブル7を有し、冗長角度定義テーブル中の該当する小領域を選択し、選択結果に基づいて冗長軸角度を設定し、動作軌跡と冗長軸角度とに基づいて動作指令を生成する。
(もっと読む)
マニピュレータ制御装置
【課題】物体表面に対してマニピュレータを適切に作用させる。
【解決手段】直線を含む曲線を有する物体表面上の複数点の位置測定を行う測定手段と、上記物体表面に物理的作用を施すマニピュレータと、上記測定手段による測定データを基に上記マニピュレータを制御する制御手段とからなる。物体表面上の任意の位置測定点の近傍の複数の位置測定点を用いて円弧近似を行う演算部を備え、該演算部は上記円弧近似を行う位置測定点の組合せを前記円弧近似の相関係数が最も高い組合せとして選択し、上記制御手段は演算部で演算された円弧近似によって得られる校正曲線を基にマニピュレータを制御する。
(もっと読む)
溶接用ロボット
【課題】溶接用ロボットの姿勢を変更しても画像センサが邪魔にならないようにする。
【解決手段】溶接用ロボット1において、アーム部15の先端に手首部16を介して溶接ツール17を取り付ける。手首部16に移動手段26を取り付けると共に移動手段26を介して画像センサ25を取り付け、この移動手段26を、画像センサ25を溶接ツール17に対して移動させる構造とする。また、移動手段26を、画像センサ25を手首部16の軸芯に沿って移動させる構造とする。或いは、移動手段26を、画像センサ25を手首部16の軸芯回りに移動させる構造とする。移動手段26を、画像センサ25を手首部16の軸芯に対して垂直方向に移動させる構造とする。
(もっと読む)
ロボットアームのためのハンドカメラ装置
【課題】 ハンドに突出部を形成することなく、しかも、ロボットアームの制御系を複雑にすることなく、把持した把持対象物を正確に目標位置に移動、位置決め可能とする。
【解決手段】 ロボットアームのハンドに、把持対象物の位置及び方向を観測するカメラを設置し、その撮像情報に基づいて把持対象物を認識し、ハンドで把持させた後、目標位置を探索及び認識して、把持対象物を目標位置に移動させるロボットアーム及びハンドの制御装置において、ハンドの把持部に前方カメラを設けるとともに、側方にも側方カメラを設置し、ハンドが把持対象物を把持する直前あるいは直後において、前方カメラの撮像情報に基づく制御から、側方カメラの撮像情報に基づく制御に切り換える切換手段を具備させ、把持した把持対象物に視界を妨げられることなく、把持対象物を正確に目標位置に移動、位置決めすることができる。
(もっと読む)
タンデムアーク溶接システムを制御するロボットコントローラ、それを用いたアーク倣い制御方法およびタンデムアーク溶接システム
【課題】アーク倣いを任意の回転中心で行った場合においても、先行極に位置ずれが発生せず、溶接欠陥が生じることのないタンデムアーク溶接システムを制御するロボットコントローラ、それを用いたアーク倣い制御方法およびタンデムアーク溶接システムを提供する。
【解決手段】タンデムアーク溶接システムを制御するロボットコントローラ8は、先行極処理部11aが算出した先行極変化量から左右および上下方向の位置ずれを補正する先行極補正量を算出する先行極補正部14aと、後行極処理部11bが算出した後行極変化量から回転方向の位置ずれを補正する後行極補正量を算出する後行極補正部14bと、先行極2aの位置ずれを補正する回転中心補正量を算出する回転ずれ補正制御処理部16と、ティーチング位置と倣い補正時における溶接トーチ2の回転中心の位置を補正するロボット軌跡計画処理部13と、を備える。
(もっと読む)
パラレルリンクロボットの動作方法
【課題】パラレルリンクロボットの駆動モータには、常に過大な負荷が繰返しかかることが多い。更に高速な動作や、過大な負荷をかける必要があるときには、一般には、より大型で高出力なモータを採用するか、減速機等をもちいて、トルクを増大する方法を採択することになる。しかしながら前記従来の技術では、パラレルリンクロボット自体の構成が、高出力化、大型化するために、コストアップを伴うという課題がある。
【解決手段】本発明のパラレルリンクロボット21は、移動開始点と移動終了点座標情報から、適切な移動姿勢を演算する機能を有し、移動開始前もしくは、移動中に、駆動負荷が軽減する姿勢をとり、移動を行うことを可能とする。
(もっと読む)
ロボットの制御装置及びロボットの制御方法
【課題】通常のティーチング以外の動作を行わずとも、カメラとワークとの位置関係を維持しながら撮像対象物の姿勢を変更できるロボットの制御装置を提供する。
【解決手段】ティーチング時に、ロボットの手先座標である制御履歴とカメラが撮像した画像のデータを対応させて連続的に記憶する(S11〜S16)。姿勢変更指示が与えられるとワークの画像データを移動先画像,その画像の中心を注視点,ロボットの手先座標を移動先座標,制御履歴中で手先のカメラから見て奥行き方向の位置と向きが移動先座標と同じものを移動元座標,移動元座標に対応する履歴画像を移動元画像に夫々設定する。移動元及び移動先座標からワークの注視点移動距離を求め、移動先画像と移動元画像間でのワーク上注視点の画像上の位置ずれを画像注視点移動距離とし、各距離と像面距離から三角測量法で求めた注視点距離を維持したまま与えられた方向及び速度だけワークを回転させる。
(もっと読む)
ロボットを用いた嵌合装置
【課題】嵌合方向への押付により十分なモーメントが検出できない状況下でも、ワークを傷付けずに嵌合作業が行える嵌合装置及び嵌合方法を提供する。
【解決手段】嵌合ワークW2を把持したロボット11により、該嵌合ワークを定位置に設置された被嵌合ワークW1に嵌合する嵌合装置10は、被嵌合ワークに対する嵌合ワークの嵌合が進行しているか否かを判断する嵌合進行判断部と、嵌合が進行していないと判断された場合に、嵌合ワークの現在の姿勢を変化させ、変化させている間に力測定部(14)により得られた嵌合方向の力、又は嵌合ワークの嵌合方向の速度に基づいて、嵌合ワークの適正姿勢を探索するワーク姿勢探索部と、探索された嵌合ワークの適正姿勢を用いて、嵌合ワークを把持したロボットに嵌合動作を継続させる嵌合動作指示部と、を備える。
(もっと読む)
ロボット制御装置
【課題】認識対象物の3次元認識の結果に基づいて、自動的に認識対象物に対してロボットのハンドによる作業を行わせるためのロボット制御装置を提供する。
【解決手段】 認識対象物5及びハンド3の形状をシミュレーション手段10へ入力して、認識対象物5を把持する際のモデル座標系におけるハンド3及び認識対象物5を離す際のロボットベース座標系における認識対象物5の位置・姿勢を定義し、センサ座標系における認識対象物5の位置・姿勢を求め、これらの情報に基づいて、ハンドが認識対象物5を把持する際のロボットベース座標におけるハンド3の位置・姿勢及び認識対象物5を離す際のロボットベース座標系におけるハンド3の位置・姿勢を求め、この求めたハンド3の位置・姿勢を引数として与えた制御プログラムをロボット2に出力することにより、ロボット2を制御して認識対象物5に対してハンド3による作業を行わせる。
(もっと読む)
トレイ移載装置及び方法
【課題】(1)ロボットによる多品種少量生産を効率的に行うことができ、(2)供給装置を簡略化し設置スペースを小さくでき、(3)トレイが傾いて供給されたことを検知することができ、(4)トレイが傾いていてもワークを正しく把持することができるトレイ移載装置及び方法を提供する。
【解決手段】複数の積載スペースa,b,cにそれぞれ段積み可能な複数のトレイ10と、トレイに設けられたトレイ把持部11とトレイ上に積載されたワーク1を把持可能なハンド12と、ハンドに取り付けられトレイをその上方から撮影するカメラ14と、ハンドを3次元的に移動可能なロボット16と、カメラで撮影した画像を画像処理してロボットを制御するロボット制御装置20とを備える。移載先の積載スペースの上方から撮影した画像5に基づき、トレイの傾き角度を計測し(S24)、これに基づきロボットのベース座標を較正し(S25)、トレイ上のワークを移載する。
(もっと読む)
アーク溶接ロボットの制御装置及びプログラム
【課題】溶接線倣いが適用できないワークに対しても溶接トーチの少なくとも狙い角のトーチ姿勢の自動調整ができ、ロボット言語プログラミングが不要となり、1つの命令により、数値指定に基づいて所望のトーチ姿勢が得られるアーク溶接ロボットの制御装置を提供する。
【解決手段】制御装置10は、1つの指令に応じてマニピュレータM1を駆動制御し、指定距離に基づいてレーザ変位センサLSを、第1センシング点から第2センシング点に移動させる。制御装置10は指令に応じてレーザ変位センサLSが取得した両センシング点の検出結果に基づき溶接線座標系を演算し、溶接線座標系に基づきマニピュレータM1の位置・姿勢を演算し、位置・姿勢に基づき逆演算してマニピュレータM1の各軸角度を求め記憶する。
(もっと読む)
水平多関節ロボットおよびそれを備えた搬送装置
【課題】直動機構を用いることなくワークを出し入れすることができると共に、高速動作が可能で、かつ、低発塵、省スペース化に寄与する水平多関節ロボットおよびそれを備えた搬送装置を提供すること。
【解決手段】エンドエフェクタ20、第1アーム30、第2アーム40に、さらに第3アーム50を備え、第3アーム50を揺動回転動作させることによって、例えば、アクセス位置P1の軸線P1aの延長線上に第3回転軸N3がくるようにしてから直線状にエンドエフェクタ20を移動させてワークの出し入れを行う。
(もっと読む)
1 - 20 / 94
[ Back to top ]