
Fターム[3C007LV04]の内容
マニピュレータ、ロボット (46,145) | その他の各種制御 (1,668) | エンドエフェクターの制御 (521) | 位置制御 (68)
Fターム[3C007LV04]に分類される特許
1 - 20 / 68
ロボットシステム
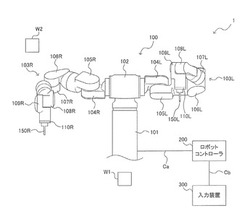
【課題】対象物を固定しつつ旋回が必要となる作業を1台のロボットで行うことができるようにする。
【解決手段】ロボットシステム1は、ロボット100と、このロボット100の動作を制御するロボットコントローラ200とを備えている。ロボット100は、先端にツール150L,150Rを備えた2つのアーム103L,103Rと、これら2つのアーム103L,103Rを支持し、旋回させる胴体部120とを有している。ロボットコントローラ200は、2つのアーム103L,103Rのうち、少なくとも1つのアーム103の先端に備えられたツール150が旋回の前後を通じて同一の位置及び姿勢に保持されるように、ロボット100を制御する。
(もっと読む)
ロボット駆動方法及びロボット

【課題】回生エネルギーの発生自体を抑制しつつ、外力やロボットの状態変化に対して強い動作を行なわせることができる駆動方法を提供する。
【解決手段】目標位置に向かって可動部を移動させる際に、駆動力を動力発生部に発生させることにより、可動部を目標位置に向けて加速を行なわせる加速工程のステップS104と、一定速にするよりも動力発生部における発生力の小さい制御を行なう予備減速工程のステップS105と、目標位置に向かう方向とは逆方向の駆動力を発生させて可動部を減速させ目標位置に停止させる減速停止工程のステップS106を行なわせる。この際に予備減速工程のステップS105の一部において予備減速推移演算工程S102で演算した指令速度を基にした速度制御を行なう。
(もっと読む)
棒状部材の搬送装置
【課題】複雑な機構を利用せずに、ランダムに配置された棒状部材を逐次的に効率よく取出し、取出した棒状部材を所定の場所に搬送することができる搬送装置の提供。
【解決手段】吸引装置18は、ロボットハンド22に取付けられたノズル24を有し、取出し対象の棒状部材14aの第1の円柱状部分30の端部にノズル24を接近させ、第1の円柱状部分30をノズル24内に吸引しながら、ノズル24を上昇させて棒状部材14aを保持するように構成されている。
(もっと読む)
ロボットシステムまたはロボット制御装置
【課題】冗長な自由度を有するマニピュレータをより最適に制御することができるようにしたロボットシステム及びロボット制御装置を提供する。
【解決手段】1以上のアクチュエータを有するマニピュレータ2とこれを制御するコントローラ3とを有し、コントローラ3は、アクチュエータの内の一部を冗長軸と設定し、マニピュレータの目標位置姿勢を設定し、マニピュレータが現在の姿勢から目標位置姿勢に達するまでの動作軌跡を生成し、マニピュレータの到達可能範囲内の領域を分割して設定した小領域と各小領域に対応する冗長軸角度用パラメータとを対応付けた冗長角度定義テーブル7を有し、冗長角度定義テーブル中の該当する小領域を選択し、選択結果に基づいて冗長軸角度を設定し、動作軌跡と冗長軸角度とに基づいて動作指令を生成する。
(もっと読む)
溶接用ロボット
【課題】溶接用ロボットの姿勢を変更しても画像センサが邪魔にならないようにする。
【解決手段】溶接用ロボット1において、アーム部15の先端に手首部16を介して溶接ツール17を取り付ける。手首部16に移動手段26を取り付けると共に移動手段26を介して画像センサ25を取り付け、この移動手段26を、画像センサ25を溶接ツール17に対して移動させる構造とする。また、移動手段26を、画像センサ25を手首部16の軸芯に沿って移動させる構造とする。或いは、移動手段26を、画像センサ25を手首部16の軸芯回りに移動させる構造とする。移動手段26を、画像センサ25を手首部16の軸芯に対して垂直方向に移動させる構造とする。
(もっと読む)
タンデムアーク溶接システムを制御するロボットコントローラ、それを用いたアーク倣い制御方法およびタンデムアーク溶接システム
【課題】アーク倣いを任意の回転中心で行った場合においても、先行極に位置ずれが発生せず、溶接欠陥が生じることのないタンデムアーク溶接システムを制御するロボットコントローラ、それを用いたアーク倣い制御方法およびタンデムアーク溶接システムを提供する。
【解決手段】タンデムアーク溶接システムを制御するロボットコントローラ8は、先行極処理部11aが算出した先行極変化量から左右および上下方向の位置ずれを補正する先行極補正量を算出する先行極補正部14aと、後行極処理部11bが算出した後行極変化量から回転方向の位置ずれを補正する後行極補正量を算出する後行極補正部14bと、先行極2aの位置ずれを補正する回転中心補正量を算出する回転ずれ補正制御処理部16と、ティーチング位置と倣い補正時における溶接トーチ2の回転中心の位置を補正するロボット軌跡計画処理部13と、を備える。
(もっと読む)
ロボットアームのためのハンドカメラ装置
【課題】 ハンドに突出部を形成することなく、しかも、ロボットアームの制御系を複雑にすることなく、把持した把持対象物を正確に目標位置に移動、位置決め可能とする。
【解決手段】 ロボットアームのハンドに、把持対象物の位置及び方向を観測するカメラを設置し、その撮像情報に基づいて把持対象物を認識し、ハンドで把持させた後、目標位置を探索及び認識して、把持対象物を目標位置に移動させるロボットアーム及びハンドの制御装置において、ハンドの把持部に前方カメラを設けるとともに、側方にも側方カメラを設置し、ハンドが把持対象物を把持する直前あるいは直後において、前方カメラの撮像情報に基づく制御から、側方カメラの撮像情報に基づく制御に切り換える切換手段を具備させ、把持した把持対象物に視界を妨げられることなく、把持対象物を正確に目標位置に移動、位置決めすることができる。
(もっと読む)
ロボット制御装置
【課題】認識対象物の3次元認識の結果に基づいて、自動的に認識対象物に対してロボットのハンドによる作業を行わせるためのロボット制御装置を提供する。
【解決手段】 認識対象物5及びハンド3の形状をシミュレーション手段10へ入力して、認識対象物5を把持する際のモデル座標系におけるハンド3及び認識対象物5を離す際のロボットベース座標系における認識対象物5の位置・姿勢を定義し、センサ座標系における認識対象物5の位置・姿勢を求め、これらの情報に基づいて、ハンドが認識対象物5を把持する際のロボットベース座標におけるハンド3の位置・姿勢及び認識対象物5を離す際のロボットベース座標系におけるハンド3の位置・姿勢を求め、この求めたハンド3の位置・姿勢を引数として与えた制御プログラムをロボット2に出力することにより、ロボット2を制御して認識対象物5に対してハンド3による作業を行わせる。
(もっと読む)
アーク溶接ロボットの制御装置及びプログラム
【課題】溶接線倣いが適用できないワークに対しても溶接トーチの少なくとも狙い角のトーチ姿勢の自動調整ができ、ロボット言語プログラミングが不要となり、1つの命令により、数値指定に基づいて所望のトーチ姿勢が得られるアーク溶接ロボットの制御装置を提供する。
【解決手段】制御装置10は、1つの指令に応じてマニピュレータM1を駆動制御し、指定距離に基づいてレーザ変位センサLSを、第1センシング点から第2センシング点に移動させる。制御装置10は指令に応じてレーザ変位センサLSが取得した両センシング点の検出結果に基づき溶接線座標系を演算し、溶接線座標系に基づきマニピュレータM1の位置・姿勢を演算し、位置・姿勢に基づき逆演算してマニピュレータM1の各軸角度を求め記憶する。
(もっと読む)
ロボットの動作を制御する方法およびロボットシステム
【課題】ロボットの動作を制御する方法およびロボットシステムにおいて、人間の手とは異なる構造を有するロボットに対し、人間の手のようなリアルタイムの動作の制御を行うことができるものを提供する。
【解決手段】単眼カメラ30およびステレオカメラ40が、教示者10の手首22および手21を含む教示画像を取得する(教示情報取得ステップ、ステップS1)。制御装置200は、教示画像に基づいて、手指の関節および指先の位置を表す手指座標を決定し(手指座標決定ステップ、ステップS3)、この手指座標に基づいて、ロボットハンドの各関節の角度を算出する(ロボットハンド関節角度算出ステップ、ステップS4)。
(もっと読む)
ロボット
【課題】目標とする位置に処理装置を素早く且つ正確に位置させ、所望の処理を行わせることができるロボットを提供する。
【解決手段】対象物Eを把持する把持部10と、対象物Eと把持部10とを相対移動させるアーム20と、把持部10に働く慣性力および対象物Eに働く慣性力の差分を検出する慣性センサー40と、アーム20を制御して把持部10を対象物Eに向けて相対移動させるとともに、慣性センサー40の検出結果を用いて把持部10と対象物Eとの間の相対位置のずれを演算し、演算結果に基づいてアーム20を制御して、ずれが相殺されるように把持部10と対象物Eとの間の相対位置を調節する制御装置60と、を有することを特徴とする。
(もっと読む)
ロボットアームの制御プログラム及び制御システム
【課題】ハンド部を適切な位置に停止させることができるロボットアームの制御プログラムを提供する。
【解決手段】本発明に係るロボットアームの制御プログラムは、ロボットアームのハンド部を、把持対象物に向かって移動させる処理と、ハンド部に設けられた距離測定部に、ハンド部と把持対象物との距離を測定させる処理と、距離測定部がハンド部と把持対象物との距離の測定が不能となると、測定不能となる直前のハンド部と把持対象物との距離と、ロボットアームの関節部の角度から算出させた、測定不能となった後のハンド部の移動距離と、に基づいて、ハンド部と把持対象物との距離を推定させる処理と、推定させたハンド部と把持対象物との距離が閾値以下となると、ハンド部を把持対象物に向かって移動させる動作を停止させる処理と、をコンピュータに実行させる。
(もっと読む)
ピッキング方法およびハンド装置
【課題】箱体内の対象を、どのような形状であっても、またどのような姿勢であっても、ハンドによって確実にピッキングする。
【解決手段】ハンドによって4つのコーナーを有する箱体B内の対象Tをピッキングするピッキング方法において、ハンドは、略同一方向に延びて該同一方向と略直交する平面方向に相対的に移動する4本の把持爪12a〜12dを備えている。まず、ハンドの把持爪12a〜12dそれぞれを開口を通じて箱体B内に進入させて、コーナーC1〜C4それぞれに配置する。その後、把持爪12a〜12dそれぞれを互いに接近するように前記平面方向に相対的に移動させて対象Tに接触させることにより、4本の把持爪12a〜12dによって対象Tを把持する。
(もっと読む)
擦弦楽器演奏ロボット
【課題】目標値に対する追従性が向上し、音色が人間の演奏に近くなる擦弦楽器の自動演奏ロボットを提供する。
【解決手段】歪ゲージ930によって弓920の歪を計測する。演奏データ記憶部210には、楽曲演奏時に弓毛922が弦911を押す応力を指令する歪データが設定記憶されている。弓押込角算出部310は、前記歪データに追従するために必要な弓920の押し込み角の指令値を算出する。制御パラメータ設定部350は、楽曲演奏時に弓毛922と弦911と接触位置に応じて制御パラメータを更新設定する。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】物体がより安定に把持されるようにハンドの動作を制御することができるシステム等を提供する。
【解決手段】物体がハンド1により把持されることによって複数の指機構11〜15および手の平部10のそれぞれに当接している状態において、複数の指機構11〜15のそれぞれから当該物体にかけられる荷重が調節されうる。これにより、手の平部10における荷重中心p0の位置が目標手の平領域PAに含まれるように変位されうる。また、手の平部10にかかる荷重f0が目標荷重範囲FAに収まるように調節されうる。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】物体がその載置箇所から安定に持ち上げられるようにハンドの動作を制御することができるシステム等を提供する。
【解決手段】ハンド1が有する第1種の指機構11〜13の動きにより物体がつままれた上で、この物体の一部を載置箇所に当接させたままで他の部分が持ち上げられる。さらに、手の平部10の位置および姿勢が制御されることにより、手の平部10と物体との当接箇所が広げられる。そして、複数の指機構11〜15の動きが制御されることにより当該複数の指機構11〜15により物体が握られる。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】配管等の配置の自由度を高めながら、指機構の動作を安定に制御することができるシステム等を提供する。
【解決手段】ハンド1によれば、配管33に流体の圧力に応じた断面積変化が許容される程度の柔軟性を持たせ、これによって配管33およびこれを介して連結されているマスタシリンダ31の配置自由度を高めることができる。また、配管33中の流体圧力に応じて生じる配管33の断面積変化が考慮されるので、スレーブピストン位置Pxが高精度で測定されうる。
(もっと読む)
ロボットの制御装置
【課題】
作業ツールが作業中にレーザセンサを利用する倣い有効区間と作業ツールが作業中にレーザセンサを利用しない倣い無効区間において、倣い有効区間では位置姿勢制御を行い、倣い無効区間では教示姿勢となるように姿勢制御の切替えができるロボットの制御装置を提供する。
【解決手段】
溶接ロボットの制御装置はワークの形状を認識するレーザセンサを備える。レーザセンサを利用する倣い有効区間では、センサの検出結果に基づく目標位置姿勢に基づいて位置姿勢倣い制御を行うロボット制御部RCを備える。ロボット制御部RCは、倣い有効区間に隣接する前記センサを利用しない倣い無効区間では、倣い無効区間の教示点における教示データに含まれる教示姿勢となるようにロボットの姿勢制御を行うとともに、倣い有効区間の終了点の実位置と、前記目標位置姿勢の位置との差に基づいて位置制御を行う第1位置姿勢制御を行う。
(もっと読む)
移送システム
【課題】本発明は、異形の混在した箱物の大きさを検出して、正確に移載するロボットシステムを提供する。
【解決手段】
カセットに積載された箱物3を移載する移送システムであって、前記箱物3を積載した前記カセットと、前記カセットに少なくとも2つのアーム7R、7Lを挿入し、前記箱物3を移載する双腕ロボット1との間に、コンベア2を介して対向するように配置されたものである。
(もっと読む)
試料位置検知端部エフェクタおよびその使用方法
【課題】ウエハの引っ掻き傷や粒子による汚損を最少にして半導体ウエハを確実に移送し得る試料把持用端部エフェクタを提供すること。
【解決手段】光源、及び受光部に作動するように連結された本体を有する端部エフェクタを設け、前記光源、及び受光部は離間するそれぞれの光源光路開口、及び受光路開口を有し、これ等開口の間に光透過路に沿って光ビームが伝搬し、これ等光ビームが既知のビーム形状であるように前記光源光路開口、及び受光路開口の寸法を定め、前記試料と本体との空間を狭くするため、これ等試料と本体との間の相対運動を与え、前記相対運動を与えることに組み合わせて、前記光透過路に交差するように前記試料を位置決めする。
(もっと読む)
1 - 20 / 68
[ Back to top ]