
Fターム[3C007LW02]の内容
マニピュレータ、ロボット (46,145) | 具体的な制御方法 (336) | 補償要素を用いるもの (17)
Fターム[3C007LW02]に分類される特許
1 - 17 / 17
ロボットシステム、ロボット制御装置およびロボット制御方法
【課題】高精度の位置決めを容易に行うこと。
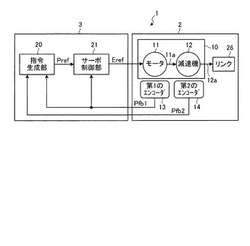
【解決手段】隣接するリンクが関節を介して連結され、関節にモータ11とモータ11の駆動力をリンクに伝達する減速機12とが設けられたロボット2において、モータ11の回転角度を検出する第1の検出部と、減速機12の出力軸の回転角度を検出する第2の検出部とを備える。ロボット制御装置3は、第1の検出部による検出結果および第2の検出部による検出結果に基づいて、モータ11の位置指令を補正し、補正した位置指令Prefを出力する。
(もっと読む)
ロボット、ロボットシステムおよび回転電機

【課題】モータの駆動力をリンクに伝達する減速機の出力軸の回転角度をより精度よく検出すること。
【解決手段】モータ11と、モータ11の駆動力をリンクである下部アーム26bに伝達する減速機12と、減速機12の出力軸125の回転角度を検出するエンコーダ14bとを備える。そして、第2のエンコーダ14bは、減速機12の出力軸125に軸継手140を介して連結される。かかる第2のエンコーダ14bの検出結果に基づいてモータ11の位置指令が補正される。
(もっと読む)
無線伝送装置とそれを用いたロボットの振動抑制制御装置およびロボット制御装置
【課題】無線化した加速度センサをロボットに取り付ける場合、センサを用いた振動抑制の効果を向上できるとともにセンサ基板における消費電力が低減できるようにする。
【解決手段】センサ信号の主成分の振動パラメータ(周波数、振幅、位相)を得る信号解析装置と、該パラメータからセンサ信号の近似波形を生成する信号発生器81を備えて、該パラメータが変更された場合のみパラメータの無線伝送を行う。得られる近似波形から各軸モータの速度を求め、シミュレーションによりロボット動作に基づくモータ速度を得て、モータ速度の差をモータ速度の振動成分とする。モータ速度の振動成分をモータの位置−速度制御ループにフィードバックしてロボットアームに発生する振動を抑制する。
(もっと読む)
多関節拮抗制御マニピュレータ
【課題】人間の筋骨格系制御特性を生かし、制御自由度や精度、制御速度を共に満足できる多関節拮抗制御マニピュレータとその制御方法を提供する。
【解決手段】多関節マニピュレータは、中央制御装置10と、多関節マニピュレータ16本体とを有する。多関節マニピュレータ本体16は、人工骨格18と、筋ワイヤ20〜30と、筋ワイヤ制御用モータ32,34を備える。筋ワイヤ20〜30は、二関節筋ワイヤ20,22と、一関節筋ワイヤ24〜28から構成される。中央制御装置10は、記憶装置に記憶された制御関数によって前記一関節筋制御用モータと前記二関節筋制御用モータを併用拮抗制御する。
(もっと読む)
ロボットの制振方法およびロボットの制御装置
【課題】ロボットの先端の振動を抑制する。
【解決手段】複数のリンク24〜34と対応するリンクを駆動する複数のモータ36〜46とを有するロボットの動作が停止するときに発生するロボット先端の振動を抑制するロボットの制振方法であって、ロボット先端の加速度を加速度センサ52によって検出し、加速度センサが検出した加速度に基づいてロボット先端の速度を算出する。ロボット先端の速度と、加速度センサの加速度検出タイミングにおける複数のモータの回転角度と、ヤコビ行列Jの逆行列J−1とに基づいて、各リンクと対応するモータとの間のねじれ角速度を算出する。さらに、ねじれ角速度に基づいてねじれ角度を算出し、ねじれ角速度とねじれ角度とに基づいて、各リンクと対応するモータとの間に発生したねじれが解消する、各モータの制御入力に加算する補償量を算出し、補償量を加算した制御入力を各モータに出力する。
(もっと読む)
位置決め装置
【課題】 精密又は微小な部品を位置決めしながら組立作業を行うロボットの接触力や位置・姿勢を、組立作業に応じて調整することができる多軸の位置決め装置を提供する。
【解決手段】 位置決め装置4は、駆動軸44を駆動するリニアアクチュエータ42と、リンク機構43とが駆動軸44によって連結され、リニアアクチュエータ42が駆動軸を駆動することでリンク機構43が駆動されて部品の位置決めを行う。コントローラ41は、変位センサ45及び位置座標変換演算部414が求めたハンドの位置、速度、及び加速度から装置のインピーダンスを算出し、算出した装置のインピーダンスからリニアアクチュエータ42の駆動力を算出する。
(もっと読む)
ロボット制御装置
【課題】ロボットの動作停止時に振動が発生することを適切に回避し、ロボットの動作開始から動作停止までの動作全体での動作軌跡の精度を適切に高める。
【解決手段】ロボット制御装置3は、ロボット2の動作停止時では摩擦補償をオフすることなく更新を停止し、ロボット2の動作再開時では、ロボット2の動作再開時の摩擦補償の状態量とロボット2の動作再開直前の摩擦補償の状態量との差分を補正量として計算し、ロボット2の動作再開時の積分補償の状態量をロボット2の動作開始直前の積分補償の状態量から補正量を差引くことで計算する。
(もっと読む)
移動ロボットの制御装置および移動ロボットシステム
【課題】外界センサにもとづく位置推定処理の遅れの影響を軽減し,目標位置への正確な位置決めを可能とし,多くの外界センサや位置推定処理アルゴリズムを利用可能であり,なおかつ追加コストのかからない移動ロボットの制御装置を提供する。
【解決手段】外界センサによる環境計測時の推定現在位置を記憶する計測推定位置記憶部を備え,記憶した環境計測時の推定現在位置と前周期の推定現在位置とを利用して外界センサにもとづく位置推定結果を補正する。
(もっと読む)
ロボットの制御方法および制御装置
【課題】 ロボットの衝突検出後の停止動作には、衝突検出位置へ戻す方法、動作方向に対しモータ最大の逆トルクで制止させる方法がある。前者は応答性が悪く、停止時間が長引き、衝突による損傷防止ができない可能性がある。後者はトルクの印加時間を予め設定する必要があり、印加時間が短いと減速が不十分で衝突損傷が大きくなり、印加時間が長いと逆方向へな動作を行い再衝突の可能性がある。
【解決手段】 衝突検出後、モータ回転方向と衝突方向が逆の場合は、位置制御から電流制御に切り換え、モータ回転と逆方向のトルクをモータで発生させモータ回転速度を減速し、衝突エネルギーを緩和する。その後、モータ回転速度が設定以下になれば、柔軟制御に切り換え、衝突で生じた減速機等での歪みを解消する。モータ回転方向と衝突方向が同じ場合は、位置制御から直接柔軟制御に切り換える。
(もっと読む)
ロボットの制御方法
【課題】 減速機を介してモータにより駆動されるロボットで衝突による外力をセンサレスで検出する場合、計算誤差や補償量に誤差を生じていた。
【解決手段】 本発明は、衝突トルク演算の際に減速機の動摩擦トルクを動力学トルクに比例して増大させて演算することにより衝突トルク検出精度の向上を実現でき、また、フィードフォワード補償量演算の際に、減速機の動摩擦トルクを動力学トルクに比例して増大させて演算することにより、誤差の少ない最適なフィードフォワード補償を得ることが可能で、優れた衝突検出精度を持つ制御方法並びに、優れた動特性補償を実現したフィードフォワード制御方法を実現することができる。
(もっと読む)
制御装置、制御方法、プログラム及びロボット
【課題】本発明は、安定した目標位置追随制御を実現可能な制御装置を提供する。
【解決手段】駆動軸の検出位置を入力するための駆動軸位置入力手段101と、出力軸の検出位置を入力するための出力軸位置入力手段102と、出力軸の位置と駆動軸の位置との関係を示す干渉行列に関するデータを保存するための記憶手段4と、出力軸の目標位置と入力された出力軸の位置に対して、データを用いて駆動軸に対する位置補償を算出する位置補償算出手段11と、入力された出力軸の位置及び入力された駆動軸の位置に対して、データを用いて駆動軸に対するトルク補償を算出するトルク補償算出手段17と、位置補償及びトルク補償から、駆動源への指令値を算出する指令値算出部15と、指令値に基づいて駆動軸を駆動するための信号を出力する出力手段103とを備える。
(もっと読む)
動作支援装置およびその制御方法
【課題】安全性が高く、かつ人間的なスムーズな動きを再現して上肢の動作を好適に支援すると共に、多様な場面で使用者の利便に供し、高いリハビリ効果の期待できる動作支援装置およびその制御方法を提供する。
【解決手段】使用者の上肢の動作を検出する第1検出手段30と、上肢の位置および姿勢を検出する第2検出手段14a、16a、18a、20aとを有し、これら各手段からの情報によって制御下に作動するマニピュレータ12を備え、このマニピュレータ12の先端は使用者の上肢が離間自在であり、該マニピュレータ12を第1検出手段30および第2検出手段14a、16a、18a、20aからの情報でフィードバック制御することで、上肢の動作を好適に支援する。
(もっと読む)
位置制御装置、位置制御方法、ロボット制御装置およびロボット制御方法
【課題】位置指令の共振周波数成分を消去する帯域消去フィルタを用いて振動を抑制する際、ロボットを構成する各軸で共振周波数が違う場合に、帯域消去フィルタの位相差により、動作軌跡に誤差が生じることを防止する。
【解決手段】位置指令を微分する微分器30と、微分器の出力を入力とし関節軸の共振周波数を中心周波数とする成分を消去するノッチフィルタ31と、ノッチフィルタの出力を積分する積分器32と、ノッチフィルタの出力を増幅する増幅器33と、積分器の出力と増幅器の出力とを加算して位置制御ブロックに出力する第2の位置指令を生成する加算器50とを備えた。帯域消去フィルタとして、速度成分フィードフォワード補償機能を付加したノッチフィルタを用いることにより、軸毎で帯域消去周波数が異なっても、ノッチフィルタの軸間位相差に起因する軌跡動作の誤差を最小限に抑えることができる。
(もっと読む)
ロボットの制御装置
【課題】柔軟制御時のロボットアームの動作制限を安全に行うことを解決課題とする。
【解決手段】位置及び速度の状態フィードバックループを有し、各関節を駆動するモータの制御回路と、位置制御ゲインまたは速度制御ゲインを通常ゲインより小さく設定する手段とを備えたロボットの制御装置において、位置制御ゲインまたは速度制御ゲインを通常ゲインより小さく設定する手段と、前記モータの動作制限値を設定または演算により導出する手段と、前記動作制限値をサーボ系の指令値とする前記制御回路とは別の第2のフィードバック制御手段と、第2のフィードバック制御の程度を決定する調節係数設定手段と、前記調節係数を乗じた第2のフィードバック制御系の出力値を、第1のフィードバック速度制御系のトルク制御部分または速度制御部分に加算する手段を有するものである。
(もっと読む)
制御装置
【課題】 柔軟機構による振動を抑制する制御装置を提供することを課題とする。
【解決手段】 柔軟機構Sを介して負荷Lを動作させるアクチュエータMを制御する制御装置1であって、アクチュエータ変位量検出手段10と、負荷変位量検出手段11と、目標変位量に基づいて重力補償値を求める重力補償手段16と、重力補償値に第1ゲインα(>2)を乗算する第1ゲイン手段17と、検出したアクチュエータの変位量と検出した負荷の変位量との相対変位量を算出する相対変位量算出手段13と、相対変位量の位相を遅らせる位相遅れ手段14と、位相を遅らせた相対変位量に第2ゲイン1−αを乗算する第2ゲイン手段15と、目標変位量に第1ゲイン手段17による乗算値及び第2ゲイン手段15による乗算値を加算する加算手段18とを備え、加算手段18による加算値に基づいてアクチュエータMを制御することを特徴とする。
(もっと読む)
関節駆動装置および関節駆動装置の制御方法
【課題】 関節部の制御の正確性を高めながらも、極力、アナログ情報の入力数を低減し得る関節駆動装置を提供する。
【解決手段】 装置のモータ側にエンコーダを接続する一方、関節部側にポテンショメータを接続し、ポテンショメータおよびエンコーダの値を読み込んでメモリに記憶した後(S201、S202)、記憶したポテンショメータの値を関節角度θPに、記憶したエンコーダ3の値を関節角度θEにそれぞれ変換し、その角度差θP−θEを計算する(S203)。角度差と関節部の負荷トルクとの関係を示す負荷トルクデータを予め記憶部に記憶し、その負荷トルクデータと、S203で算出された角度差とに基づいて、関節部の負荷トルクを推定する(S204)。
(もっと読む)
ロボット
【課題】 ワイヤ駆動方式のロボットにおいて、ワイヤを進退させるアクチュエータの動作量に、関節角の偏差を適切に加味するための技術を提供する。
【解決手段】 ロボットは、胴体側部材と、胴体側部材に回転可能に接続されている末端側部材と、末端側部材に接続されている第1、第2ワイヤと、第1、第2ワイヤを進退させる第1、第2アクチュエータと、指示角を指示角と実際角の偏差によって修正した第1修正指示角から第1アクチュエータの動作量を計算する第1コントローラと、指示角を指示角と実際角の偏差によって修正した第2修正指示角から第2アクチュエータの動作量を計算する第2コントローラと、末端側部材の回転角を指示角に維持するために必要なトルクの大きさに応じて、第1コントローラおよび/または第2コントローラで用いる指示角の修正量を調節する調節手段とを備える。
(もっと読む)
1 - 17 / 17
[ Back to top ]