
Fターム[3C007MT13]の内容
マニピュレータ、ロボット (46,145) | 制御の目的(安全以外) (972) | 省エネ (50)
Fターム[3C007MT13]に分類される特許
41 - 50 / 50
産業用ロボット制御装置
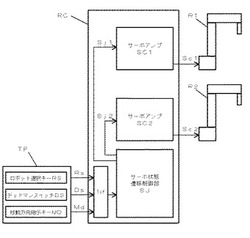
【課題】接続された複数のロボットのサーボ電源をロボット毎にON/OFFする際に少ない手順で効率よく且つ省エネルギー効果を有する産業用ロボット制御装置を提供する。
【解決手段】サーボ制御信号Sjに応じて複数のロボット各々に接続されたサーボ電源のON/OFFを切替えるサーボ制御手段と、手動運転の対象となるロボットを選択するためのロボット選択信号Rsを出力するロボット選択部RSと、デッドマンスイッチDSと、移動方向信号Mdを出力する移動方向指示部MDと、デッドマンスイッチDSからのON操作信号及び移動方向信号Mdが入力されたときはロボット選択信号Rsによって選択されたロボットに対応するサーボ電源をONに切り替えるサーボ制御信号Sjを出力するサーボ状態遷移制御部SJを備えたことを特徴とする産業用ロボット制御装置。
(もっと読む)
移動型マニピュレータ

【課題】
腕部の負荷を軽減し、2次電池での可動時間の延長と、制御周期が早く把持可能なワーク種類を拡大できる移動式マニピュレータを提供する。
【解決手段】
少なくとも2本の腕5a、5bと、前記腕の第一軸同士の軸心が略平行に配置されている胴体部9と、前記胴体部9を旋回自在に軸支した基台8と、基台8を移動させるための2つ以上の回転関節1と、各関節を駆動するサーボアンプと、指令制御部を備えて、外部指令により物体を把持、移動、開放する搬送装置において各回転関節1は、2次電池4により駆動されているが、モータパワーの消費を低減させる腕部軸構成とする。
(もっと読む)
ロボットハンド機構
【課題】 水平方向から対象物品を把持し運搬する場合において、対象物品を安全に把持しかつ安定して運搬することのできるロボットハンドを提供するにある。
【解決手段】 ロボットハンド機構10は、マニピュレータに本体11が取り付けられ、この本体11からは、対象部品30を把持する一対のグリッパ12が延出されている。対象物品30の底面を支える支持用プレート13が本体11下の収納位置に配置されてその状態でロックされている。本体11に設けられた可動ピン15は、外部に当接させる動作で可動され、この可動ピン15に連動して支持用プレートのロックが解除されてグリッパ13下の支持位置に移行され、対象物品30を支持する。
(もっと読む)
モーション制御における回生駆動
【課題】 ロボットシステムが負の動力を用いるときにはエネルギーを蓄え、ロボットシステムが正の動力を用いるときには蓄えたエネルギーを開放するような、ロボットシステム用のモーション制御システム100を提供する。
【解決手段】 このモーション制御システム100は、ロボットシステムが所定のモーションを追従するような動力を計算し、ロボットシステムの検出したパラメータに応じてロボットシステムに所定の制御信号を送信する。
(もっと読む)
産業用ロボット
【課題】ロボット内部の配線を削減し、信頼性を向上させた産業用ロボットを提供。
【解決手段】複数の関節軸アーム 53、54の関節軸及び手首部55の関節軸をそれぞれ駆動する各サーボモータ3a〜3fに隣接してそれぞれ電力変換器Cであるマトリツクスコンバータ電力変換方式を使用したサーボアンプユニット2a〜2fを配置し、各サーボモータへの動力線である1個の3相AC電源14と、3相AC電源14からそれぞれ各電力変換器Cであるマトリツクスコンバータ電力変換方式を使用したサーボアンプユニットに並列に直接入力し、電力変換器Cであるマトリツクスコンバータ電力変換方式を使用したサーボアンプユニットが変換した変換後の3相AC電力をそれぞれ3本の電源ケーブルで、各サーボモータに供給するようにしたものである。
(もっと読む)
可動軸駆動装置
【課題】脚式歩行ロボット等のロボットに用いた場合に、そのロボットの総重量や大きさを増加させることなく、関節としての可動軸に配される駆動モータのエネルギ効率を向上させることにある。
【解決手段】互いに隣接する二つのリンクを1自由度で相対運動させる可動軸を駆動する装置において、互いに異なる最高出力の二台のモータ11,12およびそれらのモータで駆動されて各々前記可動軸を駆動する互いに異なる減速比の二台の減速機14,15と、前記可動軸の必要駆動トルクと回転数とに応じてエネルギ効率が最高になるようにトルク分配値を演算するマイクロコンピュータ19と、前記演算したトルク分配値に応じて前記各モータ11,12を駆動する電流制御ドライバ17,18とを具えてなる、可動軸駆動装置である。
(もっと読む)
脚式移動ロボットの脚体関節アシスト装置
【課題】小型且つ簡単な構成でロボットのエネルギー消費を低減しつつ、脚体の関節アクチュエータの負担を軽減することができる脚体関節アシスト装置を提供する。
【解決手段】アシスト装置11はばね手段21(気体ばね)を備えており、シリンダ23内のピストン24がロボットの脚体3の膝関節8における大腿部4および下腿部5の相対的変位運動(屈伸運動)に応じて上下動する。ピストン24の上下の気室25,26に気体が充填されている。膝関節8での曲げ度合いが所定値以下であるときには、気室25,26がシリンダ23内の溝28を介して連通して、ばね手段21は弾性力を発生せず、曲げ度合いが所定値を超えると、気室25,26が互いに密封状態となってばね手段21が弾性力を発生し、その弾性力が膝関節8に補助駆動力として作用する。
(もっと読む)
歩行ロボット
【課題】 本体部の支持または歩行において冗長となる関節部に対して、関節軸を回動するアクチュエータの小型化、軽量化を図り、かつ本体部を支持していない状態では関節部を自由に回動できる歩行ロボットを得ることを目的とする。
また、本体部の支持及び歩行時に、冗長となる関節部のアクチュエータでの、消費電力の低減が可能な歩行ロボットを得ることを目的とする。
【解決手段】 この発明に係る歩行ロボットは、その脚部に回動可能な関節部を備え、関節部には関節軸201と、関節軸201を回動させるためのモータ205とを備えている。そして、脚部の床面への接地に連動して関節軸201の回動を規制する規制手段(プッシュロッド210、ロックピン212、213等)を備えている。
(もっと読む)
脚式移動ロボットの脚体関節アシスト装置
【課題】簡単な構成で電磁開閉弁の電力消費を効果的に低減することができる脚体関節アシスト装置を提供する。
【解決手段】アシスト装置12は、気室16,17に通じる気体流通路22の電磁開閉弁23を閉弁した状態で気体の圧縮または膨張によって、脚体3の膝関節(特定関節)8での屈伸運動に伴い補助駆動力を発生して、膝関節8に作用させる。電磁開閉弁23の開弁状態では、補助駆動力は発生しない。電磁開閉弁23は、自己保持機能を有する電磁開閉弁で構成され、電磁開閉弁23を閉弁状態とする所定期間で、気室16,17間の圧力差が弁体の閉弁方向に作用するように気体流通路22に介装される。
(もっと読む)
ロボットとその位置決めの方法
本発明は、ロボットと該ロボットの位置決め方法に関する。本発明の目的は、ピック・アンド・プレース作業を迅速に、エネルギー的に有利に行うことの出来るロボットの提供である。この目的のために、本質的に、水平に配置されたロボット・アーム(24,26)がその両端で、小寸法の回転ピン(30)で接続され、これにより、アーム(24)の第2の端部は、回転駆動装置(22)に回転自在に接続される。アーム(26)の第2の端部は、効果器(28)を有している。回転駆動装置(22)に接続された回転ピン(20)は、回転自在に設けられまた他の回転駆動装置(16)を有する機体(18)に接続されている。これにより、両回転ピン(10,20)は、互いに距離を置く形で位置している。  (もっと読む)
(もっと読む)
41 - 50 / 50
[ Back to top ]