
Fターム[3C007MT13]の内容
マニピュレータ、ロボット (46,145) | 制御の目的(安全以外) (972) | 省エネ (50)
Fターム[3C007MT13]に分類される特許
21 - 40 / 50
振動制御装置及び搬送装置
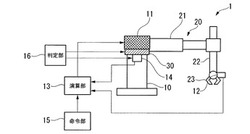
【課題】所望の位置へリンクを素早く、かつ、精度良く移動させるとともに、リンクが高速駆動している場合に消費電力を低減させることが可能な振動制御装置及び搬送装置を提供する。
【解決手段】基体10に対して移動可能な移動部20と、移動部20を駆動するアクチュエーター11と、回転角を検出する角度センサー30と、慣性力を検出する慣性センサー12と、制御信号を伝送する演算部13と、角度センサー30の検出信号を伝送する伝送部14と、命令信号を伝送する命令部15と、移動部20の駆動速度を判定する判定部16と、を有し、演算部13は、角度センサー30の検出信号の低周波数成分と慣性センサー12の検出信号の高周波数成分とに基づいて制御信号を生成し、判定部16は、移動部20の駆動速度が基準となる駆動速度よりも大きいと判定したときに、角度センサー30と伝送部14とのうち少なくとも一方を停止させる停止信号を生成する。
(もっと読む)
モーションコントロールシステム

【課題】 モーションコントローラに搭載されたCPUの省電力モードを利用することで、低消費電力化を実現するモーションコントロールシステムとその制御方法を提供することを目的とする。
【解決手段】
モーションコントローラに、ステータスと応答時間の関係を設定した応答時間テーブルと、CPUを省電力モードへの切り替える最低プライオリティの省電力タスクを設け、上位PCからのコマンドの応答時間を、応答時間テーブルに沿って変化させることで、省電力タスクを起動しCPUを省電力モードへ切り替える。
(もっと読む)
ロボット装置及びその制御方法
【課題】消費電力量を抑制しつつ、柔軟に所望動作を実行できるロボット装置及びその制御方法を提供すること。
【解決手段】ロボット装置101は、複数の関節を有するロボット機構110と、ロボット機構110の関節軸を駆動する複数のアクチュエータ109と、を備えている。また、ロボット装置101は、アクチュエータ109に対するトルク指令の関数である評価関数に基づいて、アクチュエータ109の駆動を柔軟に制御するロボット制御装置102を備えている。
(もっと読む)
工作機械と工作機械に対して作業を行なうロボットを備えた加工システム
【課題】工作機械がワークを加工する間、ロボットを休止させ、工作機械に付属したロボットの電力消費を抑制する。
【解決手段】数値制御装置は、ワーク交換完了通知ありか否か判断し、ワークが正しく取付けられている場合には休止指令をロボット制御装置に通知し、ワークの加工を実行する(CA1〜CA4)。そして、ワークの加工を終了する手前か否か判断し、手前の場合には休止解除指令をロボット制御装置に通知し、加工終了を待ってワーク交換指令を通知する(CA5〜CA8)。ロボット制御装置は、ワーク交換指令ありの場合には交換を行い、ワーク交換完了の通知を数値制御装置に出力する(RA1〜RA3)。数値制御装置からの休止指令ありの場合にはブレーキをオンし、サーボモータ励磁をオフする(RA4〜RA6)。また、数値制御装置からの休止解除指令ありの場合にはサーボモータ励磁をオンし、ブレーキをオフする(RA7〜RA9)。
(もっと読む)
真空吸着装置及び真空吸着装置を備える成形品取出機
【課題】真空手段の作動及び停止を行なうための圧力設定を成形品毎に行なうことなく、簡単な制御で真空手段によるエネルギー消費量を軽減するとともに、成形品の落下を防止する真空吸着装置を提供する。
【解決手段】吸着部材に真空圧を作用させる真空手段と、真空手段と吸着部材との連通又は連通の遮断を行なう圧力保持弁と、配管を介して吸着部材内の圧力を検出する圧力検出器と、真空手段及び圧力保持弁の作動を制御する制御手段とを備える。制御手段は、圧力保持弁を開き、真空手段を作動させて、吸着部材によりワークを吸着しているときに、圧力検出器で検出した圧力が所定時間一定となった場合には、圧力保持弁を閉じ、真空手段の作動を停止させ、その後、圧力検出器で検出した圧力が一定幅低下した場合には、圧力保持弁を開き、真空手段を作動させる制御を行なう。
(もっと読む)
マニピュレータシステムおよびマニピュレータの制御方法
【課題】作用部の作用力を低下させずにアクチュエータの消費電力を低減でき、かつ構造を複雑化させずに済む。
【解決手段】マニピュレータシステムは、マスタスレーブ方式で動作するマニピュレータ本体1と、マニピュレータ本体1の駆動を制御する制御装置2とを備えている。制御装置2は、グリッパの把持力が一定になるまでモータ14cを駆動した後に、把持力が低下しない範囲でグリッパを開く方向にモータ14cを駆動するため、把持力を一定に維持したままモータ電流値を最大連続電流値以下に抑制することができ、消費電力の削減が図れるとともに、把持力が最大連続電流値により制限されるおそれもなくなる。
(もっと読む)
歩行ロボット及びその制御方法
【課題】 2足歩行ロボットの歩行時、脚関節の剛性調節を通してエネルギー効率の高い歩行を具現し、上体の姿勢制御を通して2足歩行ロボットの全体的な歩行安定性を向上させる歩行ロボット及びその制御方法を提供する。
【解決手段】 上体に連結される複数の脚の歩行パターンを生成し、前記歩行パターンによって駆動される前記複数の脚の歩行状態に連動して前記複数の脚の剛性をそれぞれ調節し、前記上体の傾きを測定し、前記上体が重力方向と平行になるように前記上体の傾きを補償する。
(もっと読む)
打楽器演奏マニピュレータ及び打楽器演奏ロボット
【課題】打面を叩いたときの衝撃によるアーム等への負荷を減少させ、ロボットの消費電力を低減させる。
【解決手段】本発明の一態様に係る打楽器演奏マニピュレータ10は、スティック31を動作させるための掌部23fと、スティック31の先端が打楽器30の打面30aに向かう回転力を掌部23fに付与する電動機13とを備え、電動機13は、打面30aとの衝突で跳ね返されたスティック31の打面30aと反対方向へ向かう回転力を電力として回収し、スティック31を制動する。
(もっと読む)
歩行ロボット
【課題】従来から行われるアクチュエータによる能動的歩行だけではなく受動的歩行を積極的に行うことで、歩行ロボットの歩行に要するエネルギーを低減し、効率的な歩行の実現を図る。
【解決手段】歩行ロボットにおいて、その歩行と連動して、所定の閉空間内で制御用空気の動きを制御することで、該歩行ロボットの歩行をアシストする空気回路部を備える。そして、空気回路部は、歩行ロボットの歩行時において脚が立脚状態から遊脚状態に移行する際に、該脚を構成する各リンク部材の各関節部を介して行われる相対位置変化によって、制御用空気を介して該歩行のエネルギーの一部を回収する歩行エネルギー回収部と、歩行ロボットの歩行時において、脚が遊脚状態から立脚状態へ移行する際に、歩行エネルギー回収部によって回収された歩行エネルギーを開放し、該脚の立脚状態への移行をアシストする歩行アシスト部と、を有する。
(もっと読む)
成形品取出装置
【課題】 バランスシリンダーを不要にするとともに、煩雑な減圧弁の2次圧調整および構造が複雑な2次圧調整装置の付設を不要にしたカウンターウェイトを負荷重量に作用さて停止状態を保持する簡単な構造によって、モータロックのための消費電力を0にできる昇降装置を備えた成形品取出装置を提供する。
【解決手段】 成形品取出装置に備わる昇降装置20は、昇降機構21によって昇降部22と該昇降部22と同時にワーク把持ヘッド23を昇降させる。昇降機構20は鉛直姿勢のリニアモータによって構成し、その可動子(可動部)26に昇降部23を装着するとともに、可動部26には、該可動部26の重量、昇降部22の重量およびワーク把持ヘッド23の重量のトータル重量につり合う重量のカウンターウェイト24を負荷させる。
(もっと読む)
産業用ロボットのハンド装置
【課題】各指毎に各1個のモータを必要とせず、さらに、システムが異常を検出した非常停止時など、ハンド装置への電源を遮断せざるを得ないときも、ハンド装置は把持力を維持することができ、把持しているワークを落下させることがないられない産業用ロボットのハンド装置を提供。
【解決手段】ボールねじ 2の軸方向にフレーム内周にスライド可能に案内されたブロック 4と、ナット16の小径切り込み部15下面とブロックの小径部17下面との間に配置されたスプリング 9(弾性体でもよい)と、スプリング 9の変形を検出するセンサ12と、を有し、サーボモータ 3を作動させることにより各フィンガー 5の他端が開閉動作するようにし、各フィンガー 5の他端がワーク10に当たった後、さらにスプリング 9を変形してセンサ12が作動するまでサーボモータ 3を作動させた後、サーボモータ 3のブレーキ13を作動させた状態でワーク10を把持させるようにした。
(もっと読む)
センサ装置
【課題】モータにより駆動される機械装置の状態を計測するセンサは、可動部に配置されるためその情報は無線で伝送されることで多くのメリットがある。しかしセンサや無線回路に供給する電源にバッテリを使用すると容量不足や高頻度のバッテリ交換が問題となる。
【解決手段】機械装置102の状態を測定するロボットセンサ装置111において運動エネルギーを電力に変換する発電モジュール104を用いることでセンサ103および無線回路106の電力供給を行う。またバッテリ105を併用することで生成される電力不足を補う。供給源を切り替える手段を持つことで電源の切り忘れや電力不足に対応することができ、安定的な供給や動作を実現することが可能となる
(もっと読む)
脚式ロボットの脚関節駆動装置及びその制御方法
【課題】 簡単な構造で、受動歩行、受動動的歩行能動的歩行の3種類の歩行を、駆動モータの制御のみで実現することができる脚式ロボットの脚関節駆動装置及びその制御方法を提供すること。
【解決手段】 少なくとも2本の線・条の一端を回転運動出力軸端の軸心部に固定するとともに、他端を前記回転運動出力軸方向に沿う運動を行う運動体の、回転運動出力軸心から半径方向にAだけ離隔する部位に固定し、前記回転運動出力軸の回転によって2本の線・条に捩りを生ぜしめて回転運動を回転運動出力軸方向に沿う運動を行う運動体の変位に変換するようにした運動変換装置を、脚式ロボットの腰関節、膝関節、および足首関節の少なくとも1つに装着した脚式ロボットの脚関節駆動装置。
(もっと読む)
ロボット制御装置
【課題】教示操作盤を無線接続で使用する際に、利便性を損なうことなく、消費電力を抑えることにより、教示操作盤のバッテリ寿命を延ばすことができるロボット制御装置を提供する。
【解決手段】制御装置本体と、ロボットの位置及び姿勢を教示するために用いられる教示操作盤5とを備えたロボット制御装置において、教示操作盤5は、グラフィック表示機能と、グラフィック表示機能が有効な第1動作モードと、グラフィック表示機能が無効な第2動作モードと、を有し、教示操作盤5がロボット制御装置本体とケーブルで電気的に接続されているときは第1動作モードに設定し、教示操作盤5がロボット制御装置本体とケーブルで電気的に接続されていないときは第2動作モードに設定する動作モード切替え手段を備えた。
(もっと読む)
脚車輪型ロボット
【課題】 重量およびエネルギー消費量の増加を抑制し、旋回時の駆動トルクを低減するのに好適な脚車輪型ロボットを提供する。
【解決手段】 脚車輪型ロボット100は、基体10と、基体10にヨー軸回りの自由度を有して連結された脚部12と、脚部12に回転可能に設けられた駆動輪20と、ヨー軸回りの自由度の範囲で脚部12を駆動するための動力を付与する関節モータ40とを備え、障害物回避時における脚部12の駆動制御および走行時における駆動輪20の操舵制御を、関節モータ40を共通に用いて行う。
(もっと読む)
エネルギー効率の良いロボットシステム
受動型の動歩行を伴うエネルギー効率の良い二足歩行のロボットシステムは、枠を有する本体を含む。エネルギー回復機構は枠内に懸架される。エネルギー回復機構は荷重、荷重と枠とを相互接続する機械的エネルギー蓄積機構、及び荷重と枠に固定されたガイド手段を含む。機械的エネルギー入力機構は荷重と電気エネルギー発生機構とを相互接続する。出力手段は生成された電気エネルギーをエネルギー蓄積装置に移す。ロボットはまた本体部分に接続された脚を含む。受動型の動歩行中の周期的な脚の運動は、機械的エネルギー蓄積機構を通じて荷重に伝達され、結果として生じる荷重の振動運動は、機械的エネルギー入力機構によって電気エネルギー発生機構に移される。 (もっと読む)
脚車輪型ロボット及び脚車輪装置
【課題】移動にかかるエネルギー消費量を節約するのに好適な脚車輪型ロボット及び脚車輪装置を提供する。
【解決手段】脚車輪型ロボット100は、基体10と、基体10に自由度を有して連結され脚車輪装置11を含んで構成される脚部12と、脚部12の股関節部を形成する脚駆動機構部16と一体的に設けられた車輪20と、脚部12を駆動するための動力を付与する関節モータ40と、車輪20の近傍に設けられ、車輪20を駆動するための動力を付与する車輪モータ50とを備え、車輪モータ50の制御により行う車輪20のみを用いた移動制御において、関節モータ40への駆動電力の供給を断ち、関節モータ40の制御により行う脚部12のみを用いた移動制御において、車輪モータ50への駆動電力の供給を断つ。
(もっと読む)
充電器およびロボット
【課題】ロボットがその充電を行う操作者の手を離れている場合でも内蔵のバッテリの残量を容易に確認することのできる充電器および充電器よりもロボットの台数が多い場合にもバッテリ切れを極力防止できるようにしたロボットを得ること。
【解決手段】第1および第2のロボット1041、1042は共にこれらの内蔵のバッテリの残量を無線で充電器102に通知することができる。充電器102には、無線で通知されたバッテリの残量や対象とするロボットを表わした表示手段が設けられている。したがって充電器102の操作者101はそれぞれのロボット1041、1042の状態を見て充電を管理することができる。また、充電器102はロボット1041、1042の一方が充電を行っているときに他方を省電力モードに移行させる通知を行うことができる。
(もっと読む)
歩行ロボット
【課題】不整地等の環境の好ましくない床面上を歩行可能な脚式の歩行ロボットにおいて、歩行に要する消費エネルギーを可及的に抑制するとともに、ロボットの安定性を確保する。
【解決手段】複数のリンク部材と該リンク部材の各々を連結する関節部とで構成される脚を少なくとも三本有し、該脚の駆動により床面上の歩行を行う歩行ロボットであって、脚60A、60B、60Cが接続される胴体部601と、脚の関節部を駆動する駆動手段と、胴体部に設けられ、床面と接触し該胴体部を支持可能とする支持部60a、60b、60cと、駆動手段によって脚の関節部を駆動して床面の歩行を行うとともに、該歩行のサイクルにおいて支持部により胴体部が支えられる状態を所定割合迎えるように脚の駆動を行う歩行制御手段と、を備える。
(もっと読む)
ロボット制御システム
【課題】消費電力の低減、かつ、現用系と待機系のコンピュータユニットの安全な切り替えを可能にする冗長化方式を得る。
【解決手段】ロボットが実行可能な個々の作業に対し、待機系のコンピュータがホットスタンバイまたはコールドスタンバイのどちらで待機するかを示したリストを記憶させる。個々の作業の開始時に、そのリストを参照し、待機系をホットスタンバイ又はコールドスタンバイに設定する。コールドスタンバイ時の待機系では、CPUや主記憶などのデバイスを非動作にし、冗長化制御回路とモーションデータ格納用のローカルメモリを動作させる。現用系のCPUは、ロボットの現在の姿勢から安全な姿勢へ導くモーションデータを待機系のローカルメモリに書き込む。現用系で故障が発生してユニットが切り替わったとき、待機系にロボットの制御権が渡り、冗長化制御回路のモーションデータ処理部が、ローカルメモリに入力されたモーションデータに基づいてロボットを安全な姿勢に導く。
(もっと読む)
21 - 40 / 50
[ Back to top ]