
Fターム[3C007WB17]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型の制御 (1,266) | 行動制御(感情も含む) (795) | 外部情報を利用するもの (521) | 人の状態(表情、行動等) (151)
Fターム[3C007WB17]に分類される特許
1 - 20 / 151
ロボット装置
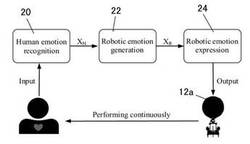
【課題】 人の表情から人の情動を認識し、情動同調の手法を利用して制御するロボット装置を提供する。
【解決手段】 ユーザに視認させる表情を表出する表出部12aと、ユーザの表情に基づいてユーザの情動状態を解析する情動認識部20と、ロボットの情動状態を、情動認識部20によって認識されたユーザの情動状態に誘導するようにロボットの情動状態を生成する情動生成部22と、情動生成部22により生成されたロボットの情動状態に基づいて、ロボットから表出させる表情を生成する情動表出部24とを備える。
(もっと読む)
コミュニケーションロボット

【課題】人で混雑した環境にも適応できる多様なコミュニケーションを提供すること。
【解決手段】コミュニケーションロボット10は、密集度DBを含み、人と共存する様々な環境に配置されて様々なコミュニケーション行動を実行する。密集度DBには、環境を区分したエリアのそれぞれと対応付けて、当該エリアにおける密集度の許容値が記憶される。コミュニケーションロボット10は、コミュニケーション行動を実行する際には、自身の現在地を取得するとともに、その現在地が含まれるエリアの現在の密集度を取得する。そして、現在地が含まれるエリアの密集度が当該エリアに対応する許容値以上か否かを判断し、その判断結果に従って、コミュニケーション行動の実行を制御する。
(もっと読む)
ロボットシステムおよびそれに用いる空間陣形認識装置
【構成】 ロボットシステム100は、ロボット10およびモーションキャプチャシステム12を含む。ロボットシステム100では、ロボット10および人の位置、体の向きおよび視線方向を用いてロボット10と人との空間陣形を分析し、ロボット10および人の対話参加状態を認識する。そして、認識した対話参加状態に応じて、ロボット10が適宜の行動を取ることによって、ロボット10および人の双方が対話参加状態になるようにした後、ロボット10が人に対して挨拶発話を行う。
【効果】 双方が対話参加状態となる空間陣形を生成した後に挨拶発話を実行するので、ロボットは人との対話を自然に開始でき、円滑にコミュニケーションを図ることができる。
(もっと読む)
コンテンツ提供システム、コンテンツ提供方法、及びコンテンツ提供プログラム
【課題】ユーザのコンテンツに対する反応を容易に取得でき、ユーザ嗜好に合ったコンテンツを提供する。
【解決手段】コンテンツ提供システムは、コンテンツを出力する出力部203と、ユーザの挙動を検出するセンサ212から得られる情報に基づいて、ユーザの挙動の種類を判定する判定部208と、出力部203で出力されたコンテンツに対応する判定部208による判定結果に基づいて、出力部203がさらに出力するコンテンツを決定するコンテンツ選択部209とを備える。
(もっと読む)
移動ロボット、移動ロボット用の学習システムおよび移動ロボットの行動学習方法
【構成】 移動ロボット10は、周囲反応情報データベース88を備え、イベント会場や街中などの人と共存する様々な環境に配置され、案内および荷物運搬などの様々なサービスを提供する。そして、サービスを提供する際には、複数種類の移動の仕方によるサービスの提供を試み、自身の行動に対する周囲の人の反応状況から適切な行動を学習して、その後のサービスの提供に生かす。
【効果】 周囲の人の反応状況から適切な行動を学習するので、人と共存する環境において効果的にサービスを提供できる。
(もっと読む)
移動体
【課題】効率良く与えられたタスクを行うことができる移動体を提供する。
【解決手段】本発明に係る移動体1は、移動障害物を検出する移動障害物検出手段6,7と、移動障害物と移動体1とが所定間隔以内に接近するか否かを判定する接近判定手段14と、移動障害物と移動体1とが所定間隔以内に接近すると判定した場合に、標準回避動作Cを計画する標準回避動作計画手段15と、標準回避動作Cに基づいて、移動体1が移動障害物を回避する回避動作と移動障害物に回避を促す働きかけ動作とを兼ねる働きかけ回避動作Eを計画する働きかけ回避動作計画手段16と、働きかけ回避動作Eに基づいて移動体1を制御する制御手段13と、を備え、働きかけ回避動作計画手段16は、標準回避動作Cにおける動作変化の速度及び動作変化の変化量のうち少なくとも一方を大きくした回避動作を働きかけ回避動作Eとして計画する。
(もっと読む)
会話ロボット
【課題】状況に応じた自然な会話を行い得る会話ロボットを提案する。
【解決手段】会話ロボット1では、主注目対象角度θ1及び従注目対象角度θ2を算出し、これら主注目対象角度θ1と従注目対象角度θ2とを全て合算した後、認識したユーザ(ユーザA及びユーザB)の総数で除算して重心方向角度θCG1を算出し、胴体部正面8bをこの重心方向角度θCG1まで回動させる。このように、会話ロボット1では、胴体部正面8bを重心方向角度θCG1まで回動させることで、重心方向に胴体部正面8bを向けさせて、ユーザAだけでなくユーザBに対しても、あたかも注目しているかのような印象を与えることができ、かくしてユーザA又はユーザBとの間で状況に応じた自然な会話を実現し得る。
(もっと読む)
ロボットおよび行動制御システム
【課題】第1運動体の運動態様を規範とさせながらも、第2運動体に固有の制約に鑑みて適当な運動態様で当該第2運動体に指定タスクを実行させることができる行動制御システム等を提供する。
【解決手段】本発明の行動制御システム2によれば、人間(第1運動体)およびロボット1(第2運動体)の身体スケールの相違に加えて、ロボット1の構造上または機能上の制約条件が充足されるように規範運動態様{f1(q)}がスケール変換されることにより、ロボット1の目標運動態様{f2(q)}を定める目標内的特徴因子f2(q)が設定される)。さらに、ロボットの目標内的特徴因子f2(q)がスケール逆変換された結果f3(q)に基づき、運動モデルが再定義される。
(もっと読む)
ロボット制御方法、プログラム、及びロボット
【課題】ロボットの自律動作における不自然さを軽減させる。
【解決手段】可動部を有するロボットが、センサから出力される音声データまたは画像データに基づいて、ロボットに対する対話要求を検出し、検出された対話要求を示す検出データに検出の信頼度を含めて出力し、信頼度が所定レベルより高い場合は、検出データに基づいて可動部を動作させ、信頼度が所定レベルより高くない場合は、予め登録された動作データに基づいて可動部を動作させる。
(もっと読む)
ロボットの接触種類判別システム
【課題】簡単な構成で接触の種類を判別することができるロボットの接触種類判別システムを提供する。
【解決手段】本発明に係るロボットの接触種類判別システム100は、ロボット1への接触によって外力が作用する際に、接触の種類を判別する接触種類判別システムである。接触種類判別システム100は、ロボット1に搭載された、外力の力学特性を示す3軸方向以上の成分を検出する第1の検出部110と、第1の検出部110の検出結果に基づいて特徴量を算出する特徴量算出部152と、特徴量と予め接触の種類に対応するように取得したサンプル特徴量とをパターンマッチングし、ロボット1への接触の種類を判別する接触種類判別部153と、を備える。
(もっと読む)
応対ロボット、応対制御方法、及び応対制御プログラム
【課題】ロボットが人に接近する動作を人の動きに応じて適切に制御できるようにする。
【解決手段】自律的に移動し、人に対する応対行動を行うロボットにおいて、人の位置及び動きを検知する人検知部23と、人検知部23により検知された情報に基づいて人の移動経路を予測すると共に人の移動方向の変化に応じて移動経路を修正する人経路予測部24と、人の移動経路に基づいて応対行動を実施するためにロボットが人に接近する移動経路を生成するロボット経路生成部25と、人の移動経路とロボットの移動経路との交点を想定する交点想定部26と、ロボットが移動可能な応対可能領域内に交点が存在するか否かを判定する判定部27と、交点が応対可能領域から外れた場合に応対行動のための移動を停止する停止部28とを備える。
(もっと読む)
ロボット装置、ロボット装置の制御方法およびプログラム
【課題】ユーザとロボットの間で対象に関する共同注意の成立を補助可能な、ロボット装置、ロボット装置の制御方法およびプログラムを提供する。
【解決手段】対象Oに関する共同注意の成立をロボット100に促すための指令をユーザ10から取得するコマンド受信部151と、指令の取得に応じて、光束Lの照射により対象を指示するためにユーザにより操作されるポインタ200の位置および姿勢を推定する位置姿勢推定部159と、位置および姿勢の推定結果に基づき、光束の照射により指示されている対象の方向を特定し、方向の特定結果に基づき、周辺環境を表す環境地図EM上で対象を特定する対象特定部160とを備える。
(もっと読む)
移動装置、移動方法およびプログラム
【課題】周辺に存在する対象物の状態に応じた合図でロボットの行動を認識させる。
【解決手段】移動装置100は、移動方向を示す方向指示部106と、周辺に存在する対象物の状態を認識する認識部102と、認識部102により認識された対象物の状態に応じて、方向指示部106により示される方向を制御する制御部104と、を備え、認識部は102、対象物と移動装置100との距離または対象物の移動速度を認識し、認識部102により認識された対象物と移動装置100との距離が短いほど、制御部104は、移動装置100のより詳細な移動経路を示すように方向指示部106を制御する。
(もっと読む)
自律移動装置および作業決定方法
【課題】ユーザから提示された物体を認識し、当該物体を用いて実行する作業内容を決定することが可能な自律移動装置を提供する。
【解決手段】本発明の自律移動装置は、所定の作業を行うために動作する動作部と、ユーザからの指示に基づいて、実行する作業を決定する作業決定部と、作業決定部により決定された作業内容に基づいて、動作部の動きを制御する制御部と、を備える。作業決定部は、ユーザから提示された物体を識別するための物体情報を取得する情報取得部と、情報取得部により取得された物体情報に基づいて、物体を識別する物体識別部と、物体と、当該物体を使用して行う作業内容とを関連付けて記憶する作業記憶部と、物体識別部により識別された物体に基づいて、作業記憶部から識別された物体を用いて行う作業内容を決定する決定部と、を備える。
(もっと読む)
ロボット装置及びロボット装置による情報提供方法
【課題】認識されたユーザーに応じて周辺環境に関する情報を適切に提供することが可能なロボット装置及びロボット装置による情報提供方法を提供する。
【解決手段】移動部と、移動しながら外部の環境を認識する外部環境認識部と、環境に基づいて環境地図を生成する環境地図生成部と、情報提供する地点を環境地図内に指定する情報提供地点指定部と、情報提供の対象とする複数のユーザーを登録し、情報提供する地点毎に情報提供するユーザーを設定するユーザー管理部と、環境からユーザーを認識する人物認識部と、ユーザーの行動を認識する行動認識部と、ユーザーの行動に基づいてユーザーの将来の行動を予測する予測部と、情報提供する地点とユーザーの将来の行動との関係に基づいて情報提供する情報提供部とを備える。
(もっと読む)
制御装置、制御方法およびプログラム
【課題】対象物の個々の行動予測の困難性に応じて移動体の動作を制御する。
【解決手段】制御装置100は、所定の制御パラメータに基づいて移動体の行動を制御する制御部114と、対象物の特徴情報と対象物に関する危険情報とを対応付けて記憶している記憶部104と、対象物の特徴情報を認識する認識部102と、認識部102により認識された対象物と移動体との距離を検出する検出部108と、検出部108による検出結果と対象物の特徴情報に対応する危険情報とから、制御パラメータを決定する決定部112と、を備える。
(もっと読む)
サービス提供装置、サービス提供プログラム及びサービスロボット
【課題】サービス対象者を適切に選択することを課題とする。
【解決手段】サービス提供装置1は、移動情報取得部2と、干渉判定部3と、サービス対象者選択部4とを有する。移動情報取得部2は、自装置を基準として規定される第1の領域に存在する複数の人の移動方向及び移動速度を取得する。さらに、干渉判定部3は、移動情報取得部2によって取得された複数の人の移動方向及び移動速度からそれぞれ推定される人の移動推定軌跡が第1の領域よりも小さく、かつ自装置を基準として規定される第2の領域へ干渉するか否かを判定する。サービス対象者選択部4は、自装置がサービスを提供するサービス対象者として、干渉判定部3によって移動推定軌跡が第2の領域へ干渉すると判定された人を選択する。
(もっと読む)
ロボット
【課題】ロボットがユーザに提示した行動を発動しやすくする。
【解決手段】このロボットは、一の行動プログラムを選択する行動プログラム選択手段、行動プログラム選択手段によって選択された一の行動プログラムに設定された発動条件をみたすようにユーザを誘導する誘導情報を提示する誘導情報提示手段、行動プログラム選択手段によって選択された一の行動プログラムの発動条件の優先度を、他の行動プログラムの発動条件の優先度より相対的に上げる優先度設定手段、優先度設定手段によって変更された一の行動プログラムを含む複数の行動プログラムの優先度に応じ、複数の行動プログラムの発動条件のパラメータを変更するパラメータ変更手段、及びパラメータ変更手段によってパラメータが変更された発動条件に従って、当該発動条件がみたされているか否か判定する判定手段を備える。
(もっと読む)
ユーザ支援システム
【課題】ユーザによる機器の操作を適切に支援すること。
【解決手段】ユーザ支援システムは、ユーザが操作する機器と、上記ユーザによる上記機器の操作を支援する処理を実行する支援装置と、上記ユーザの位置と姿勢を表すユーザ情報を取得するユーザ情報取得手段と、上記機器の位置と姿勢を表す機器情報を取得する機器情報取得手段と、上記機器の作動状態を表す作動状態情報を取得する作動状態情報取得手段と、を備え、上記支援装置は、支援装置自体の位置と姿勢のうち少なくとも一方が変化するよう可動する可動部を有している。さらに、上記ユーザ支援システムは、上記作動状態情報の履歴の変化に応じて、上記ユーザ情報と上記機器情報に基づいて上記支援装置による上記ユーザに対する支援処理が実行可能となるよう上記可動部の動作を制御すると共に、上記支援装置による支援処理を実行するよう制御する支援装置制御手段を備えた。
(もっと読む)
相関分析システム
【課題】複数の時系列データ間の相関関係の推定精度の向上を図ることができるシステムを提供する。
【解決手段】本発明の相関分析システム100によれば、一の対象から取得された複数の状態軌道の状態空間における分布態様に応じて、当該複数の状態軌道が分類される。状態軌道において特異な形状特性を示す特異点のうち、状態空間における位置および形状因子が近似する特異点群がクラスタリングされることによりクラスタが生成される。
(もっと読む)
1 - 20 / 151
[ Back to top ]