
Fターム[3C007WB21]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型の制御 (1,266) | 行動制御(感情も含む) (795) | 外部情報を利用するもの (521) | 障害物、作業物の情報を利用するもの (136)
Fターム[3C007WB21]に分類される特許
1 - 20 / 136
ロボットの軌道計画システム及び軌道計画方法
【課題】少ないノードで軌道計画の成功率を向上させることができる、ロボットの軌道計画システムを提供する。
【解決手段】本発明の一形態に係るロボットの軌道計画システム10は、グラフ構造データ格納手段に格納されているグラフ構造に対して、スタートノード及びゴールノードを追加し、さらに最終姿勢のハンドの周辺空間にノードを追加して、追加したノードと、隣接するノードとをエッジで接続し、スタートノードからゴールノードまでを結ぶ経路を探索するグラフ構造探索処理手段と、グラフ構造探索処理手段により探索された経路に含まれるノードが示す姿勢が、環境情報と干渉するか否かを判定し、干渉していると判定した場合には、ノードをグラフ構造から除外するノード有効性判定手段と、を備える。
(もっと読む)
移動体

【課題】効率良く与えられたタスクを行うことができる移動体を提供する。
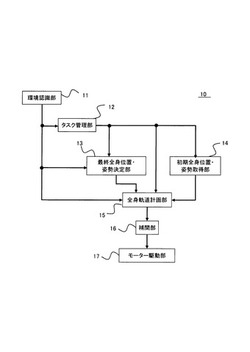
【解決手段】本発明に係る移動体1は、移動障害物を検出する移動障害物検出手段6,7と、移動障害物と移動体1とが所定間隔以内に接近するか否かを判定する接近判定手段14と、移動障害物と移動体1とが所定間隔以内に接近すると判定した場合に、標準回避動作Cを計画する標準回避動作計画手段15と、標準回避動作Cに基づいて、移動体1が移動障害物を回避する回避動作と移動障害物に回避を促す働きかけ動作とを兼ねる働きかけ回避動作Eを計画する働きかけ回避動作計画手段16と、働きかけ回避動作Eに基づいて移動体1を制御する制御手段13と、を備え、働きかけ回避動作計画手段16は、標準回避動作Cにおける動作変化の速度及び動作変化の変化量のうち少なくとも一方を大きくした回避動作を働きかけ回避動作Eとして計画する。
(もっと読む)
ロボットの軌道計画システム及び軌道計画方法
【課題】ロードマップを用いて軌道計画を行う場合に、複雑な環境下でも指定されるタスクに応じた軌道計画を実現可能とし、かつ、軌道算出可能性を保証しつつ軌道計画に要する処理コストを低減可能とする。
【解決手段】ロボットの軌道計画システム20は、タスク種類と、初期姿勢と、最終姿勢と、に応じて構成された複数のノードがそれぞれ登録された複数のロードマップを記憶するロードマップ記憶部21と、入力されるタスク種類と、入力される初期姿勢及び最終姿勢と、から、対応するロードマップIDを特定するロードマップ選択器22と、周辺の環境情報を取得する環境情報取得器23と、ロードマップIDから対応するロードマップを特定して、入力される初期姿勢及び最終姿勢と、環境情報と、から、軌道を計画する軌道計画器24と、を備える。
(もっと読む)
移動可能領域抽出装置および移動可能領域抽出方法
【課題】移動体が移動する移動領域内の障害物を検出する際に、人や他の自律移動ロボットなど、移動経路上から移動する移動体を障害物として抽出することなく、移動体が目的地まで効率良く移動することができる移動経路を生成するための移動可能領域抽出装置および移動可能領域抽出方法を提供する。
【解決手段】第1の距離センサが観測した距離の情報に基づいて、障害物の領域を表す第1の障害物領域を検出する第1の障害物検出手段と、第2の距離センサが観測した距離の情報に基づいて、障害物の領域を表す第2の障害物領域を検出する第2の障害物検出手段と、第2の障害物領域に基づいて継続的に移動している障害物を移動物として検出し、第1の障害物領域から、該検出した移動物の領域を表す第1の障害物領域を除いた領域を、移動体が移動することができる移動可能領域として抽出する障害物領域抽出手段と、を備える。
(もっと読む)
移動ロボット
【課題】移動中に繰り返し取得される障害物センサのデータを統合した環境マップを生成するのに要する計算コストを低減した移動ロボットを提供する。
【解決手段】移動ロボットは、移動中に繰り返し周囲の障害物を検知する。オドメトリ部は、障害物検知を行った検知地点間の距離と夫々の検知地点における検知方向の間の角度を記録する。マップ生成部は、記録された距離と角度に基づいて、各検知地点における障害物センサのデータを統一の座標系に写像した環境マップを生成する。マップ生成部はさらに、最新の検知地点との距離が既定の距離閾値より大きいという距離条件、及び、前記最新の検知地点における検知方向との角度が既定の角度閾値よりも小さいという角度条件、を共に満足する過去の検知地点におけるセンサデータを、環境マップを生成するための元データから除外する。
(もっと読む)
脚式ロボットの歩行着地位置計画方法
【課題】着地予定初期位置がリアルタイムに変更され得ることに適した脚式ロボットの着地予定位置計画方法を提供する。
【解決手段】この歩行着地位置計画方法は次のステップを備える。コンピュータ内に、障害物をモデル化した3次元環境モデル空間(障害物W)を構築するステップ。足平の形状モデルを3次元環境モデル空間内で路面上に配置して障害物Wとの干渉チェックを行い、障害物と干渉しない位置に着地予定初期位置f1〜f8を定めるステップ。このステップによって少なくとも2歩分の着地予定初期位置を求めた後、足平形状モデルより足平面内方向のサイズが大きい拡大足平モデル(a1等)を3次元環境モデル空間内で着地予定初期位置に配置して障害物Wとの干渉チェックを行い、路面と平行な方向にて障害物と干渉しない範囲まで拡大足平モデルを狭め(符号b4の領域を削除する)、狭めた拡大足平モデルを路面投影した着地許容範囲を定めるステップ。
(もっと読む)
移動装置、移動方法およびプログラム
【課題】周辺に存在する対象物の状態に応じた合図でロボットの行動を認識させる。
【解決手段】移動装置100は、移動方向を示す方向指示部106と、周辺に存在する対象物の状態を認識する認識部102と、認識部102により認識された対象物の状態に応じて、方向指示部106により示される方向を制御する制御部104と、を備え、認識部は102、対象物と移動装置100との距離または対象物の移動速度を認識し、認識部102により認識された対象物と移動装置100との距離が短いほど、制御部104は、移動装置100のより詳細な移動経路を示すように方向指示部106を制御する。
(もっと読む)
ロボット装置、ロボット装置の遠隔制御方法及びプログラム
【課題】遠隔操作が必要な自律ロボット装置に対して、ユーザーが容易に遠隔操作することが可能なロボット装置、ロボット装置の遠隔制御方法及びプログラムを提供する。
【解決手段】自装置又は外部環境の現在状況を把握し、現在状況に基づいて将来の行動計画を複数の行動計画候補のうちから一つの行動計画に決定する行動計画部と、決定された行動計画に基づいて、自装置を遠隔制御する遠隔制御装置に表示する表示内容を、予め用意しておいた複数の表示パターン候補のうち一つの表示パターンに決定し、決定された表示パターンを遠隔制御装置に表示させる表示制御部とを備える。
(もっと読む)
バッテリー容量推定装置、その方法及びプログラム
【課題】移動経路で消費されるバッテリー容量を高精度に推定できるバッテリー容量推定装置、その方法及びプログラムを提供すること。
【解決手段】バッテリー容量推定装置は、地図情報を記憶する記憶手段と、地図情報における障害物の混雑の度合いを示す混雑度に基づいて、地図情報に対して安全率を設定する安全率設定手段と、記憶手段に記憶された地図情報において、現在位置から目的位置までの移動経路を算出する移動経路算出手段と、移動経路算出手段により算出された移動経路と、安全率設定手段により設定された地図情報の安全率と、に基づいて、移動経路で消費されるバッテリー容量を推定する容量推定手段と、を備えている。
(もっと読む)
有腕脚式ロボットの経路計画方法
【課題】台車を腕先のハンドで押しながら歩行する有腕脚式ロボットの特徴を活かした経路計画方法を提供する。
【解決手段】本明細書が開示する経路計画方法は、次のステップを含む。スタートからゴールまでの台車の移動経路を決定する移動経路計画ステップ(S2)。移動経路上の各地点における台車把持部位置に腕先のハンドが届く脚式ロボット位置の把持可能範囲を決定する把持可能範囲決定ステップ(S3)。スタートからゴールまでの把持可能範囲内で脚式ロボットの歩行経路を決定する歩行経路決定ステップ(S5)。上記のアルゴリズムによって、台車の移動経路とは異なる、脚式ロボットの特徴を活かした歩行経路を決定することができる。
(もっと読む)
ロボットシステム
【課題】 環境内において、ロボットが通行してよい領域、通行を許さない領域を容易に設定するロボットシステムの構築を課題とする。
【解決手段】
レーザ距離センサを搭載したロボットを用い、通行可能な範囲の境、例えば壁面などに沿ってロボットを移動させる。この移動の際、距離センサによるセンサデータを記録しておき、これを環境の幾何形状を表す地図とマッチングすることで、環境中をロボットが移動したときの軌跡を求める。この軌跡の各点において、センサによる走査を行った場合に、レーザが地図上の障害物と交わる位置を求め、障害物との交わりが軌跡の内側にある場合は進入禁止領域、そうでない場合は通行可能領域と設定する。
(もっと読む)
制御装置、制御方法およびプログラム
【課題】ユーザとのインタラクションを介してロボットの周辺情報を更新し、ロボットへの指示を簡便化する。
【解決手段】制御装置100は、移動体に所定の処理を実行させる実行部108と、前記移動体が移動可能な領域の環境地図を記憶している記憶部104と、前記移動体の周辺情報を検出する検出部102と、前記検出部により検出された前記移動体の周辺情報に基づいて、前記環境地図を更新する更新部106と、ユーザ入力に応じて、ユーザの指示を示す指示情報を取得する取得部110と、を備え、前記実行部108は、前記環境地図を参照して、前記移動体に前記指示情報に基づく処理を実行させ、前記更新部106は、前記指示情報および前記指示情報に基づく前記移動体により実行される処理をもとに前記環境地図を更新する。
(もっと読む)
領域分割装置、領域分割プログラムおよび領域分割方法ならびにコミュニケーションロボット
【構成】 ロボット10はCPU60を含み、CPU60は、グリッドマップを用いて、オブジェクトに接触しない領域を抽出したり、オブジェクトのみならず床の模様に接触しない領域を抽出したりする。ロボット10は、抽出(分割)された領域のうち、人間のリクエストに応じた1の領域を選択して、選択した領域の大きさや選択した領域との位置関係に応じて、発話内容を決定するとともに、ジェスチャを決定する。そして、ロボット10は、指示語や特定のオブジェクトに対して設定された相対言語表現によって発話するとともに、指差しの動作を実行して、選択された領域を人間に指示する。
【効果】 人間と同様に領域を分割し、人間と同様にその1つを指示することができる。
(もっと読む)
問題解決システム、問題解決支援装置及び問題解決方法
【課題】知能発達システムに要求される性質を満たす実世界における一般問題解決システムを提供する。
【解決手段】 ロボットと問題解決支援手段とプランナとを備える。問題解決支援手段は、入力層とパターン記憶層とシンボル記憶層とを有し、記号接地フェーズでは、パターン情報の種類に応じた自己増殖型のニューラルネットワークを用いて概念情報が対応付けられたパターン情報を学習し、知識獲得フェーズでは、ロボット自身の行動の前後の実環境でそれぞれ取得したパターン情報から変化前後の環境モデルをそれぞれ取得して、前提条件と削除リストと追加リストとロボットの動作情報とを含むオペレータを生成し、問題解決フェーズでは、タスクの初期状態及び目標状態をプランナに入力してプランニングをし、プランナが出力するプラン中の動作情報に応じた動作をロボットに実行させる。
(もっと読む)
ユーザ支援システム
【課題】ユーザによる機器の操作を適切に支援すること。
【解決手段】ユーザ支援システムは、ユーザが操作する機器と、上記ユーザによる上記機器の操作を支援する処理を実行する支援装置と、上記ユーザの位置と姿勢を表すユーザ情報を取得するユーザ情報取得手段と、上記機器の位置と姿勢を表す機器情報を取得する機器情報取得手段と、上記機器の作動状態を表す作動状態情報を取得する作動状態情報取得手段と、を備え、上記支援装置は、支援装置自体の位置と姿勢のうち少なくとも一方が変化するよう可動する可動部を有している。さらに、上記ユーザ支援システムは、上記作動状態情報の履歴の変化に応じて、上記ユーザ情報と上記機器情報に基づいて上記支援装置による上記ユーザに対する支援処理が実行可能となるよう上記可動部の動作を制御すると共に、上記支援装置による支援処理を実行するよう制御する支援装置制御手段を備えた。
(もっと読む)
移動可能領域抽出装置、移動可能領域抽出システム、移動可能領域抽出方法、およびプログラム
【課題】自律移動ロボットの移動に障害となる障害物の位置を事前に検出し、自律移動ロボットが目的地まで移動する経路を生成するための移動可能領域を抽出する移動可能領域抽出装置、移動可能領域抽出システム、移動可能領域抽出方法、およびプログラムを提供する。
【解決手段】予め定められた床面の高さを表す床面判定値に基づいて、移動体と異なる位置で移動体の移動範囲内に設置された距離センサの情報に基づいて算出された観測点の高さの情報に基づいて、移動体が移動できる床面を示す床面観測点を判別する床面判別手段と、距離センサの情報に基づいて算出された観測点の位置の情報に基づいて、予め定められた二次元のグリッドマップに、床面観測点が含まれるか否かを示すフラグをマッピングする床面マッピング手段と、床面観測点が含まれることを示しているグリッドマップの領域に基づいて、移動可能領域を抽出する領域抽出手段と、を備える。
(もっと読む)
ロボット制御装置、ロボット制御方法、ロボット制御プログラム、及びロボット
【課題】人間との接触を前提とするロボットに対して、安全かつ柔軟に人間とロボットとの接触を実現するロボット制御装置、ロボット制御方法、ロボット制御プログラム、及びロボットを提供すること。
【解決手段】食器(目標物)に接近する動作を行うロボットアーム(動作本体)11を有してユーザーと接触するロボット10の動きを制御するロボット制御装置15であって、ユーザーの撮像情報に基づき、ユーザーの周囲に複数の領域を生成する安全度生成部27と、複数の行動パターン別に食器又はユーザーに対するロボットアーム11の位置、姿勢及び移動軌跡を算出するとともに、複数の領域におけるロボットアーム11の各動作速度を規定する行動指示部30と、行動指示部30の指令に基づき、ロボットアーム11の動作を制御する動作制御部31と、を備えている。
(もっと読む)
自己位置推定装置、自己位置推定方法及びプログラム
【課題】自己位置の推定を高精度に行うこと。
【解決手段】自己位置推定装置10は、検出領域内の物体との距離情報を検出する距離センサ11を備え、距離センサ11により検出された物体との距離情報に基づいて、自己位置を推定する。また、自己位置推定装置10は、距離センサ11の検出領域を複数の小領域に分割し、距離センサ11により検出された物体の距離情報と、地図情報とに基づいて、小領域毎に自己位置を判定する小領域判定手段と、小領域判定手段により判定された小領域毎の自己位置の判定に基づいて、自己位置が正常であるか否かを最終的に判定する自己位置判定手段と、を備えている。
(もっと読む)
ロボットおよび制御システム
【課題】任意形態の外乱に対して、制御対象の行動目的に鑑みて適当な形態で、当該制御対象を行動させることができる制御システム等を提供する。
【解決手段】周波数帯域の高低に応じて階層化されている複数のモジュールmodiのそれぞれが、自己モジュールが主担当する目的を他のモジュールが主担当する副目的よりも優先させながら、主目的および副目的に適合するロボットRの行動形態の候補である行動候補を探索するように構成されている。低周波の第j+1モジュールにより探索されたロボットRの行動候補よりも、高周波の第jモジュールにより探索されたロボットRの行動候補を優先的に反映させた形でロボットRの行動が制御される。
(もっと読む)
対話支援装置、対話支援方法およびプログラム
【課題】対話を支援する対象者に注意を向けていることを表示するときに、対象者の違和感を緩和できる対話支援装置、対話支援方法およびプログラムを提供する。
【解決手段】動作判定部14は、位置センサ12のデータから対話を支援する対象者の所定の動作を表す情報を取得する。カメラ13および雲台18は、カメラ13を対象者に向けることによって、対象者に注意を向けていることを対象者に向かって表示する。開閉表示部19は、カメラ13のレンズを閉じることによって、対象者に向けている注意を中断していることを表示する。コミュニケーション動作入力部11は、対象者のコミュニケーション動作を表す情報を入力する。注意表示切替制御部15は、対象者に注意を向けている表示と、対象者に向けている注意を中断している表示とを、対象者の動作を表す情報および/または対象者のコミュニケーション動作を表す情報に応じて切り替える。
(もっと読む)
1 - 20 / 136
[ Back to top ]