
Fターム[3C007WB27]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型の制御 (1,266) | 行動制御(感情も含む) (795) | 行動の仕方そのもの (103) | 具体的な感情表現方法 (27)
Fターム[3C007WB27]の下位に属するFターム
表情生成 (19)
Fターム[3C007WB27]に分類される特許
1 - 8 / 8
ロボット、ロボット制御方法およびプログラム
【課題】姿勢に応じて、違和感のない自然な音声を出力する。
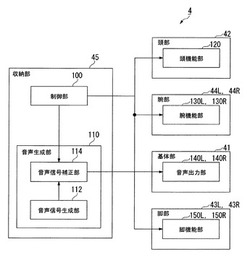
【解決手段】ロボット4は、基体(基体41)に可動連結した可動部(例えば、頭部42)の駆動を制御する駆動制御手段(制御部100)と、音声を生成する音声生成手段(音声生成部110)と、前記音声生成手段において生成された音声を出力する音声出力手段(音声出力部140L、140R)とを有し、前記音声生成手段は、前記駆動制御手段によって制御される前記可動部の前記基体に対する姿勢に基づいて、生成する音声を補正する。
(もっと読む)
コミュニケーションロボットシステム、コミュニケーションロボット制御方法およびプログラム

【課題】人に情報を伝達する動作を実行するときの強制度合いの条件に対応して異なる動作を実行する。
【解決手段】コミュニケーションロボットシステム1は、基本条件DB2、制御装置12、入力部7およびロボット部8を備える。基本条件DB2は、人に情報を伝達する動作を実行するときの、強制度合いの条件に対応して異なる動作をロボット部8に実行させる変化部分を有するプログラムを格納する。行動認識部5は、入力部7から入力したデータに基づいて、人の行動を表す情報を取得する。強制度合決定部4は、行動認識部5で取得した人の行動を表す情報に基づいて、プログラムを実行するときの強制度合いの条件を決定する。タスク決定部3は、ユーザの行動と、基本条件DB2のファイルを照合してプログラムを抽出し、強制度合いの条件に応じてプログラムの変化部分を選択する。ロボット部8は、変化部分が選択されたプログラムに従って動作する。
(もっと読む)
自律動作型ロボットおよび自律動作型ロボットの動作制御方法
【課題】周囲の人間がロボットの認識した障害物が何であるかを容易に判断可能である自律動作型ロボットを提供すること。
【解決手段】周囲の環境情報を取得する環境情報取得部と、環境情報取得部で取得した環境情報に基づいて自律動作を制御する制御部と、制御部により動作を制御される動作部と、を備える自律動作型ロボットにおいて、取得した環境情報に基づいて周囲に存在する物体を把握するとともに、把握した物体のうち、動作部を正常に動作させる際に影響を及ぼす物体を障害物と認識する障害物認識部をさらに設け、かつ、障害物認識部により認識された障害物を特定する障害物特定情報を外部に対して視覚的に出力する出力部を、さらに備えさせた。
(もっと読む)
運動制御システム、運動制御方法および運動制御プログラム
【課題】人間(第1運動体)が接する環境およびこの環境に応じた運動態様と、ロボット(第2運動体)が実際に接する環境とに鑑みて、当該第2運動体の運動を従来技術よりも適切に制御することができるシステム等を提供する。
【解決手段】本発明によれば、人間1の運動態様のうち特徴的部分さえ学習されれば、他の部分が学習されなくても十分であるという思想のもとに人間1の運動態様が学習される。そして、人間1の運動態様のうち特徴的部分さえ再現されれば、他の部分は再現されなくても十分であるという思想のもと、当該学習結果としてのモデルが用いられてロボット2の運動態様が制御される。これにより、人間1の運動態様を規範としながらも当該運動態様に必要以上に拘束されることなく、ロボット2の運動態様が制御される。
(もっと読む)
ロボット用表現動作変換システム
【課題】人間の動作をたとえばモーションキャプチャで入力するだけで、その人間の動作に近似した動作を再現できるシステムを提供する。
【解決手段】動作変換システム100はモーションキャプチャ102を含み、モーションキャプチャ102で取得した人間の動作を、頭部,左手,右手および胴体の関係で、基準座標系に対する注目座標系の位置および向きデータとして記述しなおし、それをロボットの頭部,左手,右手および胴体の関係で、基準座標系に対する注目座標系の位置および向きデータとして近似し、その近似を満足するロボットの関節角度を計算する。
(もっと読む)
動作表出装置
【課題】人間とのより自然な対話を実現するロボットを実現する
【解決手段】耳等の特徴的な構成部品を少なくとも含む特徴部と胴体部と頭部とを備え、音声入力手段と制御部とを有するロボットを開示する。制御部は、音声入力手段を介して入力される音声を認識して該音声の指示に対応する動作を制御し、上記特徴部屈曲させる関節及び、胴体部と頭部とを接続する関節とを制御することで感情を表現する。
(もっと読む)
コミュニケーションロボット用制御システム
コミュニケーションロボット制御システムでは、コミュニケーションロボットの行動入力支援のための選択入力画面が表示される。選択入力画面では、自発的行動だけでなく対話相手である人間の行動に応じた反応動作(反射的行動)を含む複数の行動のリスト、および行動に付与する感情表現のリストが、ユーザに選択可能に表示される。ユーザの操作に応じて、コミュニケーションロボットに実行させる行動および感情表現が選択決定される。そして、行動および感情表現の入力履歴に基づいて、反応動作を含んだ対話行動および感情的な対話行動のための再生動作情報が生成される。  (もっと読む)
(もっと読む)
ロボット玩具
【課題】
安価に構築しながら感情表現を効果的に行い得るロボット玩具を提案する。
【解決手段】
ロボット玩具において、少なくとも2色の光を同時に又は個別に発光可能な第1の光源と、第1の光源の周囲に配置された5つ以上の第2の光源と、感情を構成する少なくとも2種類の感情パラメータを記憶するメモリと、外部からの操作入力に基づいて感情パラメータの値を増減させる制御手段とを設け、制御手段が、各感情パラメータの値の組み合せに対応した発光パターンで第1及び又は第2の光源を発光させるようにした。
(もっと読む)
1 - 8 / 8
[ Back to top ]