
Fターム[3C007WB28]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型の制御 (1,266) | 行動制御(感情も含む) (795) | 行動の仕方そのもの (103) | 具体的な感情表現方法 (27) | 表情生成 (19)
Fターム[3C007WB28]に分類される特許
1 - 19 / 19
ロボット装置
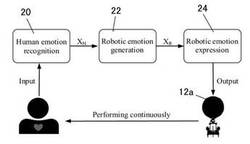
【課題】 人の表情から人の情動を認識し、情動同調の手法を利用して制御するロボット装置を提供する。
【解決手段】 ユーザに視認させる表情を表出する表出部12aと、ユーザの表情に基づいてユーザの情動状態を解析する情動認識部20と、ロボットの情動状態を、情動認識部20によって認識されたユーザの情動状態に誘導するようにロボットの情動状態を生成する情動生成部22と、情動生成部22により生成されたロボットの情動状態に基づいて、ロボットから表出させる表情を生成する情動表出部24とを備える。
(もっと読む)
形体順応型表示装置

【課題】人に触れる機会の多いロボットには、顔を付けることが、求められている。無表情な状態や、表情の微妙な動きのズレは、違和感を感じるという問題がある。このような問題点を解決すべく、人間型骨格に馴染み、人間の表情と同様の動きを表示出来る、形体順応型表示装置を提供する。
【解決手段】凹凸や曲面のある物体へ、表示装置を密着して貼り付け可能とするため、フレキシブル基板上の単位画素間に連結部、と空隙部、とを設けてなり、前記空隙部は、前記単位画素を囲む様に配置する。フレキシブル基板上の単位画素間に設けてなる前記連結部は、伸縮性を持たせたい方向に対して、斜めに配置する。
(もっと読む)
頭部動作制御情報生成装置
【課題】ロボットと人間とのコミュニケーションをより円滑にできるよう、ロボットの頭部の動きを制御する頭部動作制御情報生成装置を提供する。
【解決手段】頭部動作生成装置86は、ヒューマノイド型ロボットの頭部の動きを、当該ロボットが発生する音声に同期して制御する制御情報を生成する装置であり、句ごとに付されている談話機能タグごとに、複数の頭部動作をどのような確率で実行するかを規定する確率モデル群100と、入力された句に付された注釈に基づいて、確率モデル群100の中から確率モデルを選択し、選択された確率モデルにしたがった確率で、入力された所定の単位の音声データに対応する頭部動作コマンドをロボットの制御部90に出力する頭部動作コマンド生成部104を含む。
(もっと読む)
コミュニケーションロボットシステム、コミュニケーションロボット制御方法およびプログラム
【課題】人に情報を伝達する動作を実行するときの強制度合いの条件に対応して異なる動作を実行する。
【解決手段】コミュニケーションロボットシステム1は、基本条件DB2、制御装置12、入力部7およびロボット部8を備える。基本条件DB2は、人に情報を伝達する動作を実行するときの、強制度合いの条件に対応して異なる動作をロボット部8に実行させる変化部分を有するプログラムを格納する。行動認識部5は、入力部7から入力したデータに基づいて、人の行動を表す情報を取得する。強制度合決定部4は、行動認識部5で取得した人の行動を表す情報に基づいて、プログラムを実行するときの強制度合いの条件を決定する。タスク決定部3は、ユーザの行動と、基本条件DB2のファイルを照合してプログラムを抽出し、強制度合いの条件に応じてプログラムの変化部分を選択する。ロボット部8は、変化部分が選択されたプログラムに従って動作する。
(もっと読む)
顔表情表出ロボットの表情可変構造
【課題】簡単な構造で人間の顔表情を表出することができ、頭部全体の小型化、軽量化を実現できる他、眉や口等の模擬可動体又は模擬顔面の交換性を良好にし、また、メンテナンス性を向上させること。
【解決手段】顔表情表出ロボット10は、人間の顔面を模擬した模擬顔面12と、模擬顔面12の表面側に動作可能に取り付けられた眉体14と、眉体14を動作させて人間の顔表情を模擬表出する表情形成手段16とを備えている。模擬顔面14は、磁気を透過可能な材料及び厚みからなる。表情形成手段16は、眉体14に取り付けられた表側部材22と、模擬顔面14を挟んで表側部材22に相対配置された裏側部材24と、裏側部材24を移動させる移動機構16とを備えている。表側部材22及び裏側部材24は、何れか一方が磁石により構成され、何れか他方が磁石若しくは磁性体により構成されている。
(もっと読む)
表面に情報表示および相互作用機能を備える可動装置
【課題】表面に情報表示および相互作用機能を備える可動装置を提供する。
【解決手段】表皮ユニット11が可動本体10表面に貼設されることによってケーシングに情報を表示することができ、ソフトウェアの制御によって外皮の色、図案または文字情報を随時変化させることができる。可撓性ディスプレイ110には更にタッチセンサユニット112を設置することができ、入力される相互作用信号を感知できる。可動本体10には環境センサまたは情報識別装置を整合でき、有線または無線の技術によって環境情報、文字情報または画像音声情報の判断を入力信号とし、複数の入力信号と出力表現信号とを整合して可動本体10の相互作用性を高めることができる。
(もっと読む)
会話ロボットシステム
【課題】話し相手の感情に応じた会話等を行うことができるとともに、当該会話等を使用目的や状況に応じて容易に更新できる。
【解決手段】 音声入力器2、音声出力器3、表情出力器5、および動作出力器6を備えたロボット1と、当該ロボット1とは別体に設けられてこれに無線で接続されたコンピュータ4とを備える。コンピュータ4は、音声入力器2を介して入力した音声を分析して感情パラメータを算出するステップと予め各感情パラメータに応じて定められた発話シナリオ、表情シナリオおよび動作シナリオに基づいて音声出力器2を介して所定の音声を出力するステップ、表情出力器5を介して所定の表情を創出するステップ、および動作出力器6を介して所定の動作を実現するステップとをそれぞれ実行する。上記各シナリオはコンピュータ4のメモリ42に更新可能に記憶されている。
(もっと読む)
コミュニケーションロボット
【課題】人は違和感を覚えることなくコミュニケーションをすることができるロボットを提供する。
【解決手段】コミュニケーションロボット10は眼球部76R,76Lを含み、眼球部76R,76Lには眼カメラ46R,46Lが設けられる。眼カメラ46R,46Lから取得した画像中の人や特定の物などの物体位置が検出され、眼球部76R,76Lがその物体の方向に向くように変位される。したがって、コミュニケーションロボット10は、人と視線を合わせたり、あるいは物体方向を注視したりする格好となる。また、眼球部76R,76Lは、頭部42が動いているとき、頭部42が向こうとする方向に視線が向けられるなど頭部42の動きに関連して変位される。
(もっと読む)
ロボット装置
【課題】 情報に基づいて顔表情を変化させて発話するロボット装置を提供する。
【解決手段】 内側に蛍光層51を形成した中空球体状のスクリーン筐体50を用意する。そして、その内部にメール等の情報を受信する携帯電話20と、受信情報に基づいて内側から口形状を楕円で描画する第1レーザー描画装置30と、左右の目形状を楕円で描画する第2レーザー描画装置40と、スピーカ装置26を備える。第1レーザー描画装置30と第2レーザー描画装置40は、携帯電話20の受信情報に応じてそれぞれの楕円形状を変化させる。即ち、ロボット装置の口形状と目形状を変化させる。又同時に、スピーカ装置26は携帯電話20の音声出力を増幅する。これにより、ロボット装置は顔表情を変化させて発話する。このレーザー描画はスクリーン筐体50裏面の蛍光層51によって蛍光発光する。よって、点灯室内でも外部より明瞭に視認される。
(もっと読む)
コミュニケーションロボット
【課題】視線移動に際して眼球だけでなく首(頭部)も回転し、視線の演出によってコミュニケーションロボットの意図を伝達するときの視線の動きがごく自然で、ロボットの意図を確実に表現できるロボットを提供する。
【解決手段】コミュニケーションロボット10では、頭部64は所定軸たとえば鉛直軸(S軸)周りに回転できる首を介して設けられ、その頭部には、同じく鉛直軸周りに回転できる眼球48が設けられる。CPUは、注視対象者に視線を移動するとき、眼球による視線の移動に対する首の寄与率(A1)を設定し、寄与率に従って計算した首の関節角度θおよび眼球の関節角度αに基づいて首および眼球を制御する。
(もっと読む)
ロボット装置及びその表情制御方法
【課題】
本発明は、簡易な構成で、ユーザとの間で適切なインタラクションを行い得るロボット装置及びその制御方法を実現するものである。
【解決手段】
表情生成部106が、ユーザ発話やロボット装置自身の発話に応じて表情表出を制御することにより、あたかもロボットが発話に応じた感情を抱いているかのような自然な印象をユーザに対して与えることができる。
(もっと読む)
ロボット装置
【課題】 この発明は、ユーザのニーズや好みに応じてロボットの表情を容易に変更することができるロボット装置を提供する。
【解決手段】 この発明は、表情を変化させることができるロボット装置であって、透光性の球形状のスクリーン10からなる頭部1を胴体部2に取り付け、この胴体部2の内部に顔の表情を投影するための液晶プロジェクタ6を設ける。スクリーン10の内周面に液晶プロジェクタ6から映像光を出射し、頭部1に表情映像を投影するとともに、液晶プロジェクタ6に与える映像を変化させることで顔の表情及び/または向きを変化させる。
(もっと読む)
ロボット装置およびロボット装置システム
【課題】 特定の話者が音声を発する際の癖を表現することにより、話者が伝達しようとする情報を、聴衆に正確に理解させることができるロボット装置を提供する。
【解決手段】 人体各部分の動きと同様の動きを起こさせるアクチュエータ群13と、音声を発するスピーカ12とを備えたロボット装置10であって、入力された文章の各語句について音声合成部33により合成された音声をスピーカ12から発するとともに、その語句が語句/癖対応データベース34に登録されている場合に、その語句に対応する癖データに記憶された人体各部の動きを形体癖模写部35により模写させて音声と動きとを同期させる。
(もっと読む)
眼球制御装置、眼球制御方法および眼球制御プログラム
【課題】 眼球の動きを人間の眼の動きにより近似するように正確に制御することができる眼球制御装置、眼球制御方法および眼球制御プログラムを提供することである。
【解決手段】 ロボットの眼球11Lの回転中心Pを、眼球の前後方向の長さである長軸L1上で中点Mから所定距離dだけ奥側(背面側)にずれた位置に設定する。ずれの距離dは、2.5mmに設定される。それにより、ロボットの右および左の眼球の回転運動が人間の眼の動きにより近似する。
(もっと読む)
ロボットおよびロボットシステム
【課題】 人との共同行為によってゴミを回収する目的を達成しかつ人との相互依存的および相互構成的な関係を築くことが可能なロボットおよびロボットシステムを提供することである。
【解決手段】 ゴミ箱ロボット100の制御用コンピュータ20は、本体部1の周囲に人を検出した場合には、本体回転用モータ23により人の方向に本体部1を向ける。予め記憶された複数の行為のうちいずれかをランダムに選択する。選択された行為を実行するようにディスプレイ11、音声合成装置22、スピーカ14、本体回転用モータ23および移動用モータ24を制御する。所望のゴミがゴミ収容部30内に投入された場合には、本体回転用モータ23により本体部1を人の方に向け、感謝の気持ちを本体部1の動き、スピーカ14による発話およぴディスプレイ11に表示された表情により表し、選択された行為の選択確率を増加させる。
(もっと読む)
曲面顔画像表示を用いたコミュニケーションロボット
【課題】豊かで親和性の高い表情を表出するためのロボットを提供する。
【解決手段】顔に相当する部位において感情状態に基づいて生成された表情を曲面ディスプレイ上に画像として表示させる表情表示手段と、表情の一部として首の運動も含めるために画像表示機と運動機構を一体化した機構と、その手段・機構における表情画像作成手段、また表情を自動的に生成する手段から成る。
(もっと読む)
テキストビジュアル音声(TTVS)合成方法及びコンピュータで実行可能なプログラム
【課題】仮想的または物理的なロボットがあたかも実際に話しているかのように口を動かすために必要な情報を生成できるようにする。
【解決手段】 TTVS合成方法は、オーディオ音声単位特定マークとそのそれぞれの口の動きの軌跡パラメータとのマッピング(32)を確立するステップと、それぞれ継続時間長が付された音声単位特定マークのリストを準備するステップと、それぞれの継続時間長がリストで特定された、リスト中の各音声単位について、口の動きの軌跡を表すパラメータ(60)を連結するステップと、連結された口の動きの軌跡パラメータに従って、人工の口を駆動するための口駆動信号を発生するステップ(62)と、を含む。
(もっと読む)
オブジェクトを動画化するのを可能にする電子装置及び方法
本発明の電子装置は、第一のアニメーションにおけるオブジェクトの少なくとも1つの位置、オブジェクトの第二のアニメーションの第一の部分に基づいて、オブジェクトの新たなアニメーションの第一の部分を決定可能な処理ユニットを有する。さらに、処理ユニットは、第二のアニメーションの第二の部分に基づいて新たなアニメーションの第二の部分を決定可能である。オブジェクトを動画化するのを可能にする方法は、オブジェクトの第一のアニメーションにおけるオブジェクトの少なくとも1つの位置、オブジェクトの第二のアニメーションの第一の部分に基づいて、第一の期間の間にオブジェクトを動画化するのを可能にする第一のステップを含む。本方法は、オブジェクトの第二のアニメーションの第二の部分に基づいて第二の期間の間にオブジェクトを動画化するのを可能にする第二のステップを含む。 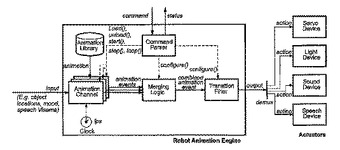 (もっと読む)
(もっと読む)
アニマトロニクス・フィギュアの現実的な動作を生成する計算環境
アニマトロニクス・フィギュアの動作を生成するシステムを開示する。このシステム(200)は、異なる種類の動作をリアルタイムで生き物のように生成すべく構成されている。動作ソフトウェアモジュール(106)は、ユーザ入力の動作を、ユーザが選択した固定の動作列及び/またはアルゴリズム的に計算した動作と組み合わせることによって合成動作を形成する。アニマトロニクス・フィギュアの動作をさらにフィルタ処理して、生き物のような動きを生成する。組合せ動作は、要素動作を重ね合わせ、変化させ、あるいは修正することによって形成される。ユーザ入力コマンド及び刺激から決まるコマンドに基づいて動作をフィルタ処理して、生き物のような動きを生成する。 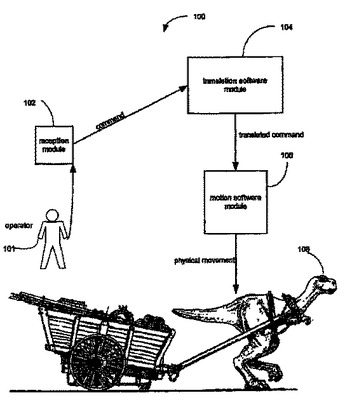 (もっと読む)
(もっと読む)
1 - 19 / 19
[ Back to top ]