
Fターム[3C030DA04]の内容
自動組立 (6,729) | 搬送・組立ライン一般 (2,452) | 工程制御 (192)
Fターム[3C030DA04]の下位に属するFターム
フィードバック手段を有するもの (28)
ライン選択手段を有するもの (9)
Fターム[3C030DA04]に分類される特許
1 - 20 / 155
エレベータ部品検索システム
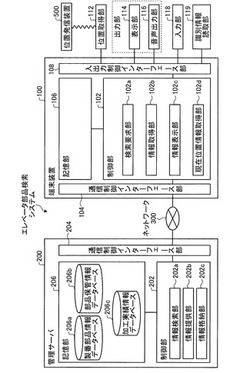
【課題】エレベータの膨大な部品群の管理や必要な部品を探す作業者の手間を省力化できるエレベータ部品検索システムを提供することである。
【解決手段】エレベータ部品検索システムは、管理サーバおよび端末装置を通信可能に接続している。管理サーバは、端末装置から送信される検索要求に基づいて、製番部品情報に示された部品に対応する部品保管情報を検索し、製番部品情報に示された部品が保管エリア内に保管されていない場合は、当該部品に対応する加工実績情報を検索し、検索された部品保管情報を端末装置へ送信する。端末装置は、部品保管情報に基づいて、部品が保管エリア内に保管されているか否かを示す情報を表示部に表示させ、部品が保管エリア内に保管されていない場合は、加工実績情報に基づいて、当該部品が加工されているか否かを示す情報を表示部に表示させる。
(もっと読む)
ロボットシステム

【課題】一連の作業を複数の作業ロボットに作業分割して実行するロボットシステムで、一部の作業ロボットの一部の作業区分に遅延が発生しても、他の作業ロボットに待ち時間が発生することなく生産性を向上させる。
【解決手段】アームロボット6a〜6dに設けられたロボットコントローラ4a〜4dには、n個の作業区分を割り振る。アームロボット6eに設けられたロボットコントローラ4eには、n個よりも少ないm個の作業区分を割り振る。いずれかのアームロボット6での作業区分の作業で遅延が生じたときは、遅延が生じたアームロボットよりも下流のアームロボットに設けられたロボットコントローラに、未実施となっている作業区分を割り振りし直す再割り振り処理を実行する。再割り振り処理を実行する際には、各ロボットコントローラに割り振られる作業区分の数の上限はn個である。
(もっと読む)
自動設備
【課題】汎用性が高く且つ低コストな構成により電力を削減できる自動設備を提供する。
【解決手段】自工程11を構成する機器111、112と、機器111、112を制御する制御手段113と、他工程12、13の状態を検知する検知手段114、115とを備え、制御手段113は、自工程11のサイクルが完了した状態において、検知手段114、115の検知結果に基づいて自工程11の干渉待ちの有無を判定し、自工程11の干渉待ちが有ると判定した場合、機器111、112に対して電力供給を遮断し、電力供給遮断制御が行われた状態において、検知手段114、115の検知結果に基づいて自工程11の干渉待ちが解消されたか否かを判定し、検知手段114、115が検知した他工程12、13の状態に基づいて自工程11の干渉待ちが解消されたと判断した場合、機器111、112に対して電力供給を復帰させる。
(もっと読む)
ロボットセル
【課題】複数のロボットステーションを組み合わせて構築したロボットセルにおいて、各ロボットステーションのスペース効率の改善、タクトの向上、ロボットステーション内の機材の使用効率の改善を目的とする。
【解決手段】ロボットステーションは、一対のロボットアーム101,102と、ロボットアームのワークスペースに対して撮像面を平行に撮像手段を固定するブース104を備える。撮像手段としてのカメラ106の視野を、隣接するロボットステーションのワークスペースである架台の天盤103aまで広げる。さらに、各ロボットステーションに搭載されるロボットアームの可動範囲を、隣接するロボットステーションのワークスペース内に広げる。
(もっと読む)
組立作業時間の算出方法及びその装置
【課題】
製品設計のCAD情報から,製品の作業時間を生成し,その製品の改善余地を生成できるようにする。
【解決手段】
製品のCAD情報から製品を構成する各部品のモデル属性情報と、各部品の製品構成情報とを抽出し、この抽出したモデル属性情報と製品構成情報と予め記憶しておいた部品単位判定条件とを用いて製品を構成する部品を組立作業時間の計算対象となる作業単位に変換し、予め記憶しておいた部品種類の判定条件と部品種類ごとの組立作業時間の計算式を用いて変換した作業単位ごとの標準作業時間を算出し、予め記憶しておいた組立作業時間の増減要素の判定条件とこの増減要素ごとの増減作業時間の計算式を用いて算出した作業単位ごとの標準作業時間の増減時間を算出し、算出した標準時間の情報と算出した増減時間の情報とを用いて製品の組立作業時間を算出するようにした。
(もっと読む)
セル生産システム
【課題】セル生産システムにおいて、簡単な構成により、セル生産の柔軟性を活かしなが
ら作業性の向上を図る。
【解決手段】システム1は、作業者M,M1,M2(代表してM)がワークWと共に移動
しつつワークWに対する処理を行うことによりワークWを製品化する作業を繰り返して製
品を順次生産するためのシステムであり、ワークWを移送するコンベア2と、作業者Mを
認識する検出装置3と、コンベア2を制御する制御装置4と、を備え、制御装置4は検出
装置3による認識結果に基づいてコンベア2の駆動速度を作業者Mごとに変化させる。検
出装置3による作業者Mの認識は、作業者Mの腕に取り付けたデータ送信部5を用いて行
われる。セル生産の柔軟性を活かしながら、コンベア2によるワークWの移動速度を各作
業者Mに合わせることができ、作業時間短縮と作業性向上を実現できる。
(もっと読む)
ロボットセル
【課題】ロボットステーションの小型化と、メンテナンス性及び高剛性の両立が可能なロボットセルを提供する。
【解決手段】 複数のロボットによって部品を組立てるロボットセルにおいて、一対のロボットアーム102をそれぞれ搭載した複数の架台101を互いに隣接させてそれぞれ収容する複数のブース103を設ける。各架台101の一側面は、電源コントローラボックス106を出入するための開口部101aを有し、開口部101aによって架台101の剛性が低下するのを補うため、各ブース越しに互いに隣接する2つの架台101を接続部材120によって結合する。各接続部材120の両端部は、それぞれビスによって両側の架台101に締結される。
(もっと読む)
作業システム、ロボット装置、機械製品の製造方法
【課題】人手による作業のための既存の作業スペースや作業設備をできるだけ用いながら、ワークに対する作業を精度良く行なうことができるようにした作業システム及びロボット並びに機械製品の製造方法を提供する。
【解決手段】胴部と、胴部に設置され複数の関節部を有する第1アームと、第1のアームと別体に胴部に設置され複数の関節部を有する第2アームと、第1アーム及び第2アームにそれぞれ設けられたハンド部と、を有するロボットにより複数種類のワーク部品のいずれかの種類のワーク部品については第1アーム及び第2アームのハンド部で同時に保持し、残る種類のワーク部品については第1アーム又は第2アームのハンド部で保持搬送する。
(もっと読む)
部品の組立作業支援システム
【課題】組立作業中に正しい部品の組み合わせが行われるような誘導を行う。
【解決手段】複数の部品A〜Gからなる製品についての組立作業を支援する。各部品A〜Gに、部品用ICタグTa〜Tgを予め取り付け、それぞれの部品に固有の部品コードを記録しておく。各ICタグと無線交信可能な部品確認装置200には、各組立手順1〜3のそれぞれを示すメッセージと、各組立手順で使用する部品に固有の部品コードと、を含む支援データが用意される。部品確認装置200は、特定の組立手順を示すメッセージを提示し、その間に特定の部品コードが読み取られたときに、当該部品コードが、現時点で提示されている特定の組立手順で使用する部品に固有の部品コードのいずれかに一致するか否かを判定して、その結果を報知する。
(もっと読む)
部品の組立作業支援システム
【課題】組立作業中に正しい部品の組み合わせが行われるような誘導を行う。
【解決手段】複数の部品H〜Kからなる製品についての組立作業を支援する。部品H,Kには、それぞれ左右両端部にICタグTh1,Th2,Tk1,Tk2が取り付けられており、部品I,Jには、それぞれ上下両端部にICタグTi1,Ti2,Tj1,Tj2が取り付けられている。各ICタグは、近接した通信範囲内に存在する別なICタグと無線交信し、当該通信相手が、正しい組立作業を行った場合に隣接配置されるべきICタグであるか否かを判定する。判定結果は、各ICタグから音もしくは光を発することにより、組立作業者に報知される。各ICタグと無線交信する機能をもった管理装置を更に設け、この管理装置が各ICタグから判定結果を受信し、受信した判定結果を組立作業者に報知するようにしてもよい。
(もっと読む)
外部操作ハンドガイド装置とその制御方法
【課題】装置の可動範囲内で組付作業を完了することができる外部操作ハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア内で移動可能なロボット16と、ハンドの先端部に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ロボットエリアと組立ラインの間に、ハンド14が移動可能な作業エリアとハンドが侵入できない安全エリアとが隣接して設けられ、オンハンド操作盤18は、作業対象物にワークを組付ける際に、作業エリア内に位置するように設定されている。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有している。
(もっと読む)
ハンドガイド装置とその制御方法
【課題】単純作業はロボットに任せ、人の判断や経験を必要とする作業時のみ、人がロボットを操作して、組立ライン上を移動する作業対象物にワークを組付けることができるハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア4a内で移動可能なロボット16と、ハンドのワーク把持装置近傍に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有しており、人6の判断や経験を必要とする作業時のみ協働モードに切替え、その他の作業を自動モードで実行する。
(もっと読む)
ワークの搬送装置
【課題】ワークが相互に干渉することなく搬送順位通りに搬送でき、省電力化を図る。
【解決手段】ワークの搬送装置1は、第1のセンサ21が第1のワークW1を検知した場合に、第2の搬送コンベア12を駆動させて第2の搬送コンベア12へ第1のワークW1を搬送するとともに、その後第2のセンサ22が第1のワークW1を検知したとき、第1の搬送コンベア11および第2の搬送コンベア12を停止させるワーク投入ステップと、第1の搬送コンベア11を駆動させて第2のワークW2を搬送し、第1のセンサ21が第2のワークW2を検知した場合に、第2の搬送コンベア12を駆動させて第2の搬送コンベア12へ第2のワークW2を搬送して、第1のワークW1および第2のワークW2を所定の離隔量だけ離隔して第2の搬送コンベア12上に留置するピッチ送りステップと、を連続して実行する。
(もっと読む)
ハンドガイド装置とその制御方法
【課題】装置の可動範囲内で組付を完了できるハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア内で移動可能なロボット16と、ハンドの先端部に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ハンド14は、作業対象物2にワーク3を組付ける際に、オンハンド操作盤18が作業対象物からロボットの反対側に突出する長さを有している。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有しており、人6の判断や経験を必要とする作業時のみ協働モードに切替え、その他の作業を自動モードで実行する。
(もっと読む)
多機種混流生産方法
【課題】ラインの全長を短くしながら、生産効率を向上できる多機種混流生産方法を提供すること。
【解決手段】多機種混流生産方法では、メインライン2を、設備による作業を優先して行う設備優先エリアと、作業者による作業を優先して行う作業者優先エリアとに分ける。複数の異なる機種のうち組立工数偏差の大きい機種を組み立てる場合には、メインライン2の作業者優先エリアからあふれた偏差作業を、メインライン2の下流側に接続されたテールライン4で集約して行う。
(もっと読む)
生産システム
【課題】複数の生産装置を簡便に通信可能に接続でき、生産装置のレイアウトの自由度が高められるとともに設置が容易に行える生産システムを提供する。
【解決手段】ワークの生産処理を行う生産装置2を複数備える生産システムであって、前記生産装置2は、ワークに生産処理を施す処理部21と、前記処理部21との間で信号を授受するとともに、該処理部の動作を制御する制御部22と、これら処理部21及び制御部22を保持する略箱状の装置基体23と、を有し、前記処理部21、前記制御部22及び前記装置基体23のうちいずれか1つ以上の外面に、前記制御部22に電気的に接続され、装置外部との間で光通信を行う光無線通信手段4が配設されていることを特徴とする。
(もっと読む)
生産システム
【課題】生産装置を並べ直すことなく、ワークに対する生産処理の順序の変更に対応可能な生産システムを提供する。
【解決手段】
ワークの生産処理を行う3つ以上の生産装置2〜9と、生産装置のうち、1つの生産装置と他の1つの生産装置に両端部が着脱可能に接続される搬送路11a、12aと、搬送路上を移動して、搬送路が接続された1つの生産装置から他の1つの生産装置にワークを搬送する搬送手段11b、12bと、を備える生産システム1であって、生産装置は、生産処理を行う処理部21と、処理部を内部に備え、略箱状に形成された装置基体28と、を有し、少なくとも1つの装置基体は、互いに交差する2方向X、Yで他の装置基体と接続されている。
(もっと読む)
生産システム
【課題】生産システムにおいて、設置床面積の有効利用が可能となり、生産装置の間でワークを効率的に搬送することができるようにする。
【解決手段】生産システムは、生産装置が、作業領域SのワークWに生産処理を行う作業ユニット6と、作業ユニット6を備え、水平面に平行な3方向と鉛直方向とからなる3つ以上の連接方向で他の生産装置と連接可能に設けられた連接壁部を有する筐体2と、連接方向に開口され、ワークWを搬入または搬出する複数のワーク搬送口と、作業領域Sと複数のワーク搬送口との間で、ワークWを移動させるワーク移動部8と、水平面に平行な連接方向のワーク搬送口である正面搬送口部3a、右側面搬送口部3c、左側面搬送口部3eにワークWを回転させる回転テーブル5と、を備える。
(もっと読む)
生産システム
【課題】レイアウトの自由度を高め、スペース効率を向上させることができる配置が可能であるとともに多品種少量生産に対応した生産システムを提供する。
【解決手段】ワークの生産処理を行う装置モジュール10を複数接続してなる生産システムにおいて、装置モジュール10に、生産処理を行う処理部30と、内部に処理部30を保持し、少なくとも8以上の構成面からなる空間充填立体形状をなす装置基体20とを備え、記装置基体20の各構成面をそれぞれ接続平面24とし、装置モジュール10同士を互いの接続平面24同士を一致させた状態で接続する。
(もっと読む)
自動組立システム及び機械製品の製造方法
【課題】既存の作業スペースや作業設備をできるだけ用いながら、組立不良を精度良く検知して製造効率を向上することができるようにした自動組立システム及び機械製品の製造方法を提供する。
【解決手段】組立ロボット101、制御装置、組立前のワーク部品が予め配置されたトレイ、組立前のワーク部品を載置したトレイを組立ロボット側に搬入する搬入路105、組立作業を行なう組立ステージ102、組立ステージ102の下部に設けられる落下物センサ104と、を有し、制御装置は、予め教示された組立手順に従って、組立ステージ上で、搬入されたトレイ上のワーク部品に対して、組立動作を行い、落下物センサにより落下物が検知されると、組立動作を中断する。
(もっと読む)
1 - 20 / 155
[ Back to top ]