
Fターム[3C045FA03]の内容
旋削加工 (1,671) | ワーク取扱い装置の用途 (71) | 搬入出 (62)
Fターム[3C045FA03]の下位に属するFターム
Fターム[3C045FA03]に分類される特許
1 - 20 / 47
工作機械のワークの機内搬送装置
【課題】工具タレットに流体圧駆動のワーク把持具を装着して行うワークの機内搬送装置に関し、ワークを把持した状態でタレットを回転でき、その回転先の位置で把持具の開閉を行うことができ、回転工具タレットにも採用することができるようにする。
【解決手段】タレットの背面に向けて進退する進退ノズルと、タレットの背面同一円周上に開口して進退ノズルとそれぞれのタレット回動位置で連通する複数の逆止弁付き受口と、タレットの工具取付部の1箇所に対して設けられた接続口と、接続口と全ての受口とを連通するタレット内の流体通路とを備える。接続口を設けた工具取付部に装着される把持具は、その把持爪を閉方向に付勢する復帰ばねを備え、接続口から流体圧の供給を受けたときに把持爪を開く。
(もっと読む)
工作機械及びワークのロードアンロード方法

【課題】工具タレットを備えた工作機械におけるワークのロードアンロードに関し、ロードアンロードを行う装置のコスト低減を図ると共に、タレットや刃物台との干渉や衝突を確実に回避できるようにする。
【解決手段】
工具タレットをその割出軸と直交する旋回軸回りに旋回位置決めする旋回装置と、当該タレットの移動領域の周縁部所定箇所にワークを搬入ないし搬出する搬送装置とを備えている。タレットの工具取付部に開閉爪とその開閉機構とを備えたワーク把持具を装着し、タレットの移動位置決め動作、割出回転動作、旋回位置決め動作を利用して、ワークの供給位置及び排出位置へのワークのロードないしアンロードを行う。ワークの供給位置と排出位置とは、同一位置であっても異なる位置であっても良い。
(もっと読む)
ワーク把持具及び旋盤のワークハンドリング方法
【課題】工具タレットに装着するワーク把持具と、当該把持具を用いる旋盤内部でのワークのハンドリング方法に関し、駆動源をワーク把持具に設ける必要がなく、移動及び割出回転するタレットへの電気配線や流体圧配管を不要にする。
【解決手段】
工具モータの回転によって開閉駆動される開閉爪を備えたワーク把持具を提供する。ワーク把持具のホルダは、工具タレットに取り付けたときに、回転工具と同様な構造でタレットヘッド内の工具駆動軸に連結される入力軸を備え、この入力軸の正逆回転をホルダに設けられている把持具の開閉爪の開閉動作に変換する回転・直線運動変換機構を備えている。
(もっと読む)
垂直な2つの工作物スピンドルを有する自動ローディング式の工作機械
【課題】
移動経路を短縮し、これにより工作物の加工が行なわれないアイドル時間を短縮する。
【解決手段】
1つの機械フレーム(1)と、1つの工具サポート(4)と、2つの工作物スピンドル(3,3’)とを有し、工作物スピンドル(3,3’)が、機械フレーム(1)に垂直方向に移動可能に配設され、工作物スピンドル(3,3’)が、工作物(9)をローディング位置(12,12’)から取り出し、作業位置(13,13’)に搬送し、送り移動を行なうために、工具サポート(4)が、機械フレーム(1)に水平方向に移動可能である、自動ローディング式の2スピンドル工作機械において、ローディング位置(12,12’)を、スピンドル軸(15,15’)の延長部内で工作物スピンドル(3,3’)の下に配設する。
(もっと読む)
垂直方向の工具スピンドルを有する自動積み込式の工作機械
【課題】コンパクトな構造様式、および改善された機械剛性を有する工作機械を提供する。
【解決手段】回転的に駆動される加工材料8、9の加工のための工作機械1であって、機械フレーム2、垂直方向の前壁6、モータスピンドル7、作業スペース17、工具14、加工材料8、9のための移送装置11、収容位置12および載置位置13を備えており、このモータスピンドル7が、X方向案内部5およびZ方向案内部4に沿って機械フレーム2における水平方向および垂直方向内において、垂直方向スライダー3にわたって移動可能に設けられており、加工材料8、9のグリップ、収容、駆動、および載置の役目を果たし、作業スペース17から収容位置12および載置位置13内へと移動可能であり、Z方向案内部4が、垂直方向の前壁6に沿って、および、X方向案内部5が垂直方向スライダー3に沿って設けられている。
(もっと読む)
ダブルスピンドル工作機械並びにロード移動及びアンロード移動
【課題】 2つの加工品スピンドル8,8′と、複数の切削工具13付の1つの切削工具ホルダ12と、複数の加工品10用の1つの搬送装置18と、2つの傾斜板25,25′付の1つの切削屑飛散防止装置20とを有する機械フレームを備えた工作機械を提供する。切削工具ホルダ12が、機械フレームに沿って移動可能に配置されている。複数の加工品10が、2つの加工品スピンドル8,8′内で複数の切削工具13によって交互に切削加工可能である結果、加工品10が、その都度の片方の加工品スピンドル8,8′内で交換可能である。2つの加工品スピンドル8,8′のうちの各々は、加工品10が切削加工可能である作業位置17,17′からロード位置19,19′に移動可能である。
【解決手段】
加工品スピンドル8,8′をロードしてアンロードするため、傾斜板25,25′が、作業位置17,17′とロード位置19,19′との間の領域から待機位置26,26′に移動可能である。
(もっと読む)
ロボットおよびワーク加工システム
【課題】加工装置にワークおよび加工ユニットを着脱するロボット、およびそれを用いたワーク加工システムを提供する。
【解決手段】中空ワークWを回転駆動する主軸21を回転可能に支持した主軸台11と、主軸台に対向して配設された心押台12と、工具42、52を径方向に移動可能に保持した加工ユニット40、50と、主軸台と心押台に進退移動可能に設けられ中空ワーク内に挿入された加工ユニットを両側より回転不能に挟持する一対のユニット保持アーバー25、31と、一対のユニット保持アーバーの協働により加工ユニットを軸線方向に移動させる軸線方向移動手段48と、一方のユニット保持アーバー内を通して工具を径方向に移動させる径方向移動手段47とによって構成された中空ワーク内面加工用の加工装置に用いるロボット140で、ロボットは、加工装置に中空ワークおよび加工ユニットを着脱するものである。
(もっと読む)
ワーク搬送装置
【課題】 工作機械のワーク保持部に保持されワークの加工前の位相決めや、機内での良否判定等が良好にかつ迅速に行え、加工中におけるカメラの汚れの問題も生じないワーク搬送装置を提供する。
【解決手段】 ローダ9のチャック14が取付けられるローダヘッド13にカメラ20を設置する。カメラ20により撮像した画像データから、工作機械1のワーク保持部3に保持された素材ワークWの位相角度θを画像処理によって求めるワーク位相角度演算手段23を設ける。また、前記のワークWを撮像した画像データを処理し、ワークWの良否を判定する良否判定手段24を設ける。
(もっと読む)
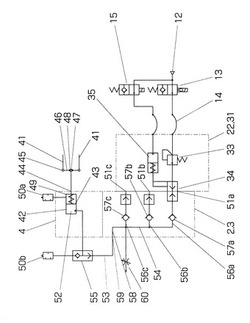
工作機械および積み込みおよび積み下ろし方法
【課題】旋盤を簡略化すること、構造的な手間暇を減少させること、および、コンパクトな構造様式を提供する
。
【解決手段】機械フレームと、この機械フレームの垂直方向(Z軸)内において移動可能な加工材料スピンドル2と、この機械フレームの水平方向(X軸)内において移動可能な工具保持装置3と、および、加工材料8のための移送装置24加工材料スピンドル2と移送装置24との間の作業位置10内において、切削屑保護装置25が設けられており、この切削屑保護装置25が、前記加工材料スピンドル2と移送装置24との間の前記作業位置の領域10から、外へと移動され、および、この切削屑保護装置25が、移送装置24の保護のために、切削屑の落下の前に、再び、前記加工材料スピンドル2と移送装置24との間の前記作業位置の領域10に帰還移動される。
(もっと読む)
工作機械システムおよびそのワーク搬送方法
【課題】 ローダによりワークを1個ずつしか搬送できない重量のワークや、一つしかチャックを有しないローダを用いる場合で、かつ反転装置を備えて両面加工を行う場合に、効率的にワークの搬入搬出が行えるようにする。
【解決手段】 工作機械1と搬出用のローダ22と、搬入用のローダ21を備える。工作機械1は、第1,第2のワーク支持部11,12と反転装置13とを有する。搬出用のローダ22は、第1のワーク支持部11から片面加工済ワークWを反転装置13に搬送する行程(a)と、第2のワーク支持部12から両面加工済ワークWを機外に搬出する行程(c)とを行う。搬入用のローダ21は、第1のワーク支持部11に機外から素材ワークWを搬入する行程(e)と、反転装置13で反転された片面加工済ワークWを第2のワーク支持部12に搬送する行程(g)とを行う。
(もっと読む)
ローダ装置
【課題】 工作機械の主軸がワークを精度良くチャッキングすることができ、ワークの寸法や形状が変わっても段取り替えが不要なローダ装置を提供する。
【解決手段】 主軸71に対し接近および離反する方向に進退自在なローダヘッド支持体4と、ローダヘッド支持体4に揺動自在に設けられたローダヘッド3と、ローダヘッド3の揺動をロックするロック機構45と、ローダヘッド3のチャック23A,23Bから主軸71へのワークWの受渡しを制御する受渡し制御部52とを備える。受渡し制御部52は、チャック23A,23BがワークWを把持するようにチャック開閉駆動源25A,25Bに出力し、かつローダヘッド3の揺動がアンロックとなるようにロック機構用駆動源46に出力した状態で、主軸71にワークWを押し当てるように進退駆動源11に出力して、ローダヘッド3とワークWとを主軸71に倣わせる制御を行う。
(もっと読む)
バイト工具を備えた加工装置
【課題】チャックテーブルの保持面に付着した旋削屑を確実に除去することができる洗浄機能を具備しているバイト工具を備えた加工装置を提供する。
【解決手段】着脱領域に位置付けられたチャックテーブル52の保持面を洗浄するためのチャックテーブル洗浄機構6であって、チャックテーブル洗浄機構6は、着脱領域に配設された移動案内部材62と、移動案内部材62に移動可能に装着され着脱領域に位置付けられた該チャックテーブル52の保持面に洗浄水を噴射する洗浄水噴射ノズル66と、洗浄水噴射ノズル66に対向して移動案内部材62に移動可能に装着された吸引ボックス68と、洗浄水噴射ノズル66を移動案内部材62に沿って移動せしめる噴射ノズル移動手段71と、吸引ボックス68を移動案内部材62に沿って移動せしめる吸引ボックス移動手段72とを具備している。
(もっと読む)
多面加工機
【課題】ワークの供給と排出、ワークの受け渡し及び加工手順などをより効率的に行うことができ、生産効率を向上できると共に汎用性が高い多面加工機を提供すること。
【解決手段】ワークの受け渡しを行う第1のワーク保持装置部及び第2のワーク保持装置部と、Z軸に平行な主軸で工具を保持してワークを加工する主軸装置部とが設けられ、第1のワーク保持装置部10が、第1の直動基体部12と、第1の旋回基体部13と、第1の軸回転部14と、第1のチャック装置部15とを備え、第2のワーク保持装置部20が、第2の直動基体部22と、第2の旋回基体部23と、第2の軸回転部24と、第2のチャック装置部25とを備え、第1のワーク保持装置部10と第2のワーク保持装置部20を制御する制御装置60を具備する。
(もっと読む)
並行2主軸旋盤
【課題】安価に、かつ、コンパクトに製造することが可能な並行2主軸旋盤を提供する。
【解決手段】並行2主軸旋盤31は、R側の刃物台104のタレット、および、L側の刃物台105のタレットに、それぞれ、スイベルジョイント機構によって2つのハンドの位置を互いに入れ替え可能なハンドリング装置10a、ハンドリング装置10bが設けられている。そして、各タレットの回転に伴って各ハンドリング装置10a,10bを所定の位置に割り出すことによって、未加工ワークの受け取り、R側の主軸台102における一次加工工程におけるワークの取り替え、主軸台102側から主軸台103側へのワークの受け渡し、L側の主軸台103における二次加工工程におけるワークの取り替え、加工済みワークの回収までの一連の動作を全自動で行うことができるようになっている。
(もっと読む)
工作機械のワーク交換装置
【課題】ワーク交換に要する時間を短縮できる工作機械のワーク交換装置を提供する。
【解決手段】ワーク把持部12に該ワーク把持部12の軸線A方向の押圧力を加えることにより該ワーク把持部12から加工済みワークW1を取り出すとともに該ワーク把持部12に未加工ワークW2を供給する第1ワーク搬送装置16と、該第1ワーク搬送装置16に未加工ワークW2を供給する第2ワーク搬送装置17とを備える。
(もっと読む)
加工装置
【課題】刃物台を主軸台の上側に配置したときに装置全体の高さが高くなることなどを防止可能な加工装置を提供する。
【解決手段】加工装置1は、旋盤10と、ワークWを旋盤10に搬送する移送装置50とを備える。旋盤10は、軸線が水平に配置された主軸15と、主軸15の先端に設けられ、ワークWを把持するチャック16と、主軸15を支持する主軸台17と、主軸15の上側に配置され、工具Tが装着される刃物台13と、主軸台17及び刃物台13を支持する支持構造体11,12などを備え、移送装置50は、主軸12の下方で、主軸12の軸線方向と水平面内で直交する方向に移動自在に設けられる移動体53と、移動体53を移動自在に支持する支持部材51,52と、ワークWを把持する把持機構61,62と、移動体53に設けられ、把持機構61,62を支持して昇降させる昇降機構63と、移動体53を移動させる水平駆動機構などを備える。
(もっと読む)
工作機械
【課題】機体の左右幅を広くすることなく、長尺なワークを搬出入することができ、加工空間内の構造が簡略な旋盤等の工作機械を提供する。
【解決手段】工作機械本体2と、搬入側ワーク載置台装置3Aと、搬出側ワーク載置台装置3Bとを備える。各ワーク載置台装置3A,3Bは、ワークWを載せるワーク載置台81と、このワーク載置台81を工作機械本体2の内外に出入りさせる内外位置切換機構82とを有する。工作機械本体2の内外を隔てる機体カバー1にスライドドア12を設ける。このスライドドア12に、各ワーク載置台装置3A,3Bを設け、かつワーク載置台81が工作機械本体2の内外に出入りする通路となる開口を設ける。
(もっと読む)
複合加工旋盤のワーク搬入・搬出装置
【課題】複合加工旋盤の工具主軸台と共同してワークを自動的に搬入・搬出する装置を提供する。
【解決手段】複合加工旋盤は主軸10と、ワークハンドリング装置20と、B軸まわりに旋回動する工具主軸台30を備える。ワーク搬入・搬出装置100は、素材搬入ハンド130と完成品受け皿140を有するフレーム120と、フレームを往復動させるシリンダ110を備える。カバー50のドア60を開いて素材B1の搬入と完成品P1の搬出を行う。
(もっと読む)
複合加工旋盤
【課題】複合加工旋盤の主軸の下方にワークハンドリング装置を配備してワーク加工エリアの有効を図る。
【解決手段】複合加工旋盤1は、ベッド10上に主軸20と工具主軸30を備える。主軸20の下方に配備されるワークハンドリング装置40は、主軸の軸線C1に平行なW軸に沿って移動制御される。ワークハンドリング装置40は軸線C2まわりに矢印F方向に旋回するワークハンドリングベッド50を有し、そのグリッパ60でワークK1を把持する。軸線C2は主軸20の軸線C1を含む鉛直面に垂直な軸であって、ワークハンドリングベッド50を90度起立させてグリッパ60が主軸20からワークK1を受け取る。ワークハンドリングベッド50の角度位置を割り出して、工具主軸30の工具T1によりワークK1を加工する。
(もっと読む)
工作機械用の自動送り装置及び自動送り装置の操作方法
【課題】2種類の装置(棒材送り装置及び門型構造装入/取出装置)の問題を解決する。
【解決手段】工作機械(特に、CNC旋盤)へ材料又は半完成加工品を自動的に送り、機械加工済みの加工品を自動的に取外すための自動送り装置において、旋盤のスピンドルの背後を通って棒材の装入が可能な統合送り装置20を有する門型構造50を備えることで万能型の自動送り装置を構成する。自動送り装置は、棒材から加工品が機械加工された後に、棒材端部の除去する制御が可能である。
(もっと読む)
1 - 20 / 47
[ Back to top ]