
Fターム[3C269CC09]の内容
数値制御 (19,287) | 被制御軸の種類、形状 (1,508) | 多関節軸 (377)
Fターム[3C269CC09]の下位に属するFターム
腕の長さが可変であるもの (7)
Fターム[3C269CC09]に分類される特許
361 - 370 / 370
多関節システムの動作の再構築、リターゲット、軌道追従及び推定
本発明の制御システムと方法は、ソースシステムの観測を基に、ターゲットシステムの動作または姿勢に関する関節変数を生成する。本制御システムと方法は、ターゲットシステムが複製する動作がより的確なものとなるように、ターゲットシステムの冗長性を有効に利用した、拘束制御とバランス制御を有する。  (もっと読む)
(もっと読む)
組込型制御装置

【課題】 多数の不揮発性メモリを用いることなく、大容量のプログラムを起動させることができるようにする。
【解決手段】 ネットワーク機能を備えた組込型制御装置1Aにおいて、ブート時に起動させるプログラムの複数の所在情報を含むプログラム所在テーブルを備え、ブート時はプログラム所在テーブルに含まれている複数の所在情報を順に参照し、所在情報が示すところにプログラムがあればプログラムをメモリ12に格納して起動させる。
(もっと読む)
仮想ツールセンターポイントを決定する方法
光切断センサの仮想センサツールセンターポイント(センサTCP)を決定するために、本発明は、センサTCPを、位置が既知である基準コンポーネントの面にある線の一点(いわゆる指標)と十分に空間的に一致させ、基準コンポーネントの面に対する垂線が決定され、センサのZ方向を基準コンポーネントの面の垂線と一致させ、指標の線に対するセンサの定義されたアライメントが決定されることを意図している。  (もっと読む)
(もっと読む)
モータおよびコントローラの反転:位置制御ロボットに対するトルク指令

【課題】 通信遅延、測定ノイズおよびロボットシステム固有のコントローラパラメータの不確かさが存在する場合に、モータと関節コントローラのダイナミクスをキャンセルするシステムと方法を提供する。
【解決手段】 (もっと読む)
(もっと読む)
強化された手動制御によるCMMアーム
本発明は、外郭が設けられた強固CMMアーム用装置に関し、内部CMMアームと、内部CMMアームを、1つ以上の内部ボリュームが、固体対象物および流体の進入に対してシールされるように、複数の伝達手段を介して駆動する外郭を備える。本発明はまた、RCAの触覚制御にも関する。 (もっと読む)
多関節型ロボットの制御方法
【課題】関節の各軸が軸ずれした場合でも、ロボットの動作を正常に復帰させる。
【解決手段】ロボット衝突後、ロボットコントローラは次のことを実行する。基準姿勢状態で各軸J1〜J6の補正用角度データJh(1)〜Jh(6)を得(ステップS1)、この角度データを不揮発性メモリ6に記憶させ、軸ずれ値ΔJ(1)〜ΔJ(6)を検出する(ステップS2)。そして、衝突前の各作業ポイントでのティーチングポイントデータP1〜Pnを軸J1〜J6の角度データに変換し(ステップS3)、各作業ポイントでのティーチング角度データの各軸角度データを前記軸ずれ値ΔJ(1)〜ΔJ(6)に基づいて補正し(ステップS4)、上記各作業ポイントでのティーチング角度データからティーチングポイントデータを得る(ステップS5)。
(もっと読む)
作業機械の制御システム
【課題】
制御対象の制御軸をある時は同期して、ある時は独立に制御することができる作業機械の制御装置を提供する。
【解決手段】
2軸以上で構成される複数の制御対象を制御する作業機械の制御装置において、各制御対象1、2の各軸を駆動するモータなどのアクチュエータを制御する際に、アクチュエータと制御対象1、2を関係付ける軸構成情報入力手段203を備え、制御対象への動作指令をアクチュエータに出力する際は、軸構成情報入力手段203で作成された、制御対象と物理的なアクチュエータの接続関係を記す物理軸構成情報に基づいて、動作指令を所定のアクチュエータに分配する指令分配処理部208を備えた作業機械の制御装置。これにより、重複したアクチュエータは同時に同期して制御できるし、切り離されて独立に非同期に制御できるため、作業効率の向上が図られる。
(もっと読む)
許容差ベースの経路設計と制御の方法
この出願に係る国際出願には要約書の提出がありません。 (もっと読む)
複数の相互作用ロボットをオフラインでプログラミングする方法及びシステム
複数の相互作用ロボットをオフラインでプログラミングする方法及び装置を開示する。例えば、複数の相互作用ロボットをオフラインでプログラミングするシステム(100)は、複数の相互作用ロボット(131〜133)のプログラムコード(111)をオフラインでプログラミングし、そして検証するコンピュータ(110)と、コンピュータ(110)に接続されてプログラムコード群の内の少なくとも一つのコードのダウンロードを受信して実行するロボットコントローラ(120)と、を含む。複数の相互作用ロボット(131〜133)はロボットコントローラ(120)によって制御することができる。 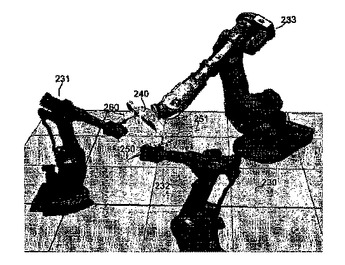 (もっと読む)
(もっと読む)
多軸ロボットの可動部分の変位を制御するための方法及び装置
この発明による方法は、少なくともパスの幾何形状(320)に関する情報と負荷の指令(310)を含む動き指令(300)をパス生成器(400)に供給する措置と、加える負荷の信号(800)を計算する措置と、この加える負荷の信号(800)をパス生成器(400)に伝える措置と、加える負荷の当該のパスの接線への射影と当該の指令のこの接線への射影との間の偏差を最小化する手法で、パスに沿った動き指令(500)を計算する措置と、ロボット(600)を操作するための手段に当該の動き指令(500)を伝える措置とで構成される。この制御を実施するための手段(200,400,700)を備えた装置も開示する。  (もっと読む)
(もっと読む)
361 - 370 / 370
[ Back to top ]