
Fターム[3C269RB03]の内容
Fターム[3C269RB03]の下位に属するFターム
円、円弧 (49)
楕円、楕円弧 (4)
放物線 (3)
双曲線 (1)
3次以上の式で表現される曲線 (21)
サイクロイド、インボリュート
Fターム[3C269RB03]に分類される特許
1 - 7 / 7
軌道生成方法および軌道生成装置
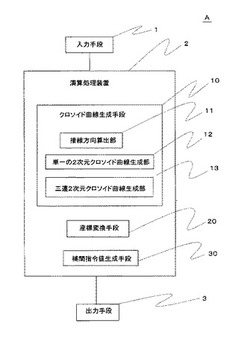
【課題】所要エネルギーの低減を図ることができる軌道生成方法および軌道生成装置を提供する。
【解決手段】点列間をクロソイド曲線により補間して軌道生成をなす軌道生成方法および軌道生成装置Aであって、軌道生成装置Aはクロソイド曲線生成手段10を有する演算処理装置2を備え、前記クロソイド曲線が三連クロソイド曲線とされ、それにより通過点での接線方向の連続性および曲率の連続性が担保されてなるものである。なお、端点が直線と接続される場合、その接線方向は直線方向に一致させられる。
(もっと読む)
3次元経路制御方法
【課題】 3次元空間における経路制御においても、ほぼ正確に経路誤差を評価でき、目標経路によらずに同じ扱いが可能となる新たな3次元経路制御方法を確立する。
【解決手段】3次元空間上の位置目標値の軌跡である目標経路に実際の位置の軌跡である経路を追従させる経路制御方法であって、ディジタル制御に対応するように、3次元空間上の位置目標値の軌跡である目標経路を離散化した目標点の集合として捉えて、現在位置から最も近い目標点を探索によって求め、前記最短目標点を含み、目標点列ベクトルに対して垂直となる平面上で現在位置と前記最短目標点間の距離を経路誤差として評価し、この経路誤差を小さくする制御を行う。
(もっと読む)
加工制御装置

【課題】 ワークの加工形状に対する工具の食い込みを効率よく回避することができる加工制御装置を提供する。
【解決手段】 加工制御装置3は、軸制御データAに基づいて工具がワークを加工する際の工具位置を求める工具位置算出手段381と、軸制御データAに基づいて求められたワークを加工する際の工具位置とワークの加工形状とを比較して該加工形状に対し工具が食い込んだ状態にあるか否かを判断する工具食い込み判断手段382と、工具が食い込んだ状態にあると判断されたときに、該食い込んだ状態が回避されるように工具位置を修正する工具位置修正手段383と、修正された工具位置に基づいて軸制御データAにおける各軸方向の工具移動速度を修正する軸制御データ修正手段384と、を備える。
(もっと読む)
可動工具の制御方法、入力装置及び工作機械
【課題】送り関数の入力を簡易化し、その順応性を高めること、並びにそうした改善された送り関数の入力を可能にする方法、入力装置及び工作機械を提供すること。
【解決手段】可動工具、特に研削工具を、少なくとも1つの軸についての工具の経時的な移動を指定する送り関数を用いて制御するための方法では、初期の送り関数が、少なくとも1つの初期の送り曲線29の形でモニタに表示される。初期の送り関数、及びポインティング・デバイスを用いて行われた入力から送り関数が計算され、修正された初期の送り曲線としてモニタに表示される。送り関数から工具を移動させるための制御コマンドが生成される。送り関数の入力は簡易化され、その順応性が高められる。
(もっと読む)
産業用ロボット制御装置
【課題】ワークの側面やロール面に対して肉盛溶接等の処理を行う場合、一筆書きのような1本の螺旋状に処理を行うことにより、ワークの側面やロール面に均一な処理を行うことができるとともに、その作業を実行するプログラムを簡単に教示できる産業用ロボット制御装置を提供する。
【解決手段】
螺旋肉盛動作のためにマニピュレータ及びポジショナの手動運転が行われて入力された開始点Ps,終了点Peの教示データ等は補助記憶装置に格納される。ロボット制御装置のCPUは螺旋命令のTCPの移動速度V、螺旋ピッチPi等に基づき補間演算して教示された開始点Psから終了点Peの螺旋軌跡上の補間点位置(姿勢)をXn=Rs・cos(θn)、Yn=Rs・sin(θn)、Zn=θn・κで求める。CPUは算出した螺旋軌跡の補間点毎の各位置姿勢に基づいてマニピュレータの各軸値毎の動作量を求めて、マニピュレータ、ポジショナを制御する。
(もっと読む)
近似点群データからの近似曲線生成プログラム及び方法
【課題】近似点群データの全てが理想的なオフセット形状Koから均等にある許容値内に存在しているとしている背景技術の方法では、場所により形状Koからのずれ具合が異なる実際の近似点群データからでは、場合によっては指定された許容誤差を超え、滑らかさもなくした近似曲線や補正曲線が生成されてしまうことがある。
【解決手段】近似点群データからの近似曲線生成方法において、元々の曲線形状を近似した点群データを求める際に作成された近似多角形形状の線分ごとに前記点群データを区分すると共に、その区分境界付近の点群データを有効点群データに、その有効点群データより内部の点群データを無効点群データにそれぞれ選別する近似多角形形状範囲判定工程と、前記有効点群データのみに着目し、着目した有効点群データまたはその近傍を通る近似曲線を最終的に求めるべき近似曲線として生成する近似曲線生成工程と、を含む。
(もっと読む)
サーボドライバおよび複数軸のサーボシステム
【課題】処理能力の高い高価なCPUを必要とせずに、複数軸のサーボシステムを動作できるサーボドライバを提供する。
【解決手段】コントローラ1から出力される最終目標位置データおよび経路を規定する補間形状データとを含む位置指令を入力して各サーボモータ4、5をそれぞれ制御する各サーボドライバ2、3において、自軸がサーボシステムの何軸かを示す軸設定パラメータを収納する軸設定パラメータ収納部6と、前記補間形状データを収納する補間形状データ収納部7と、前記最終目標位置データを収納する最終目標位置データ収納部8と、軸設定パラメータからのデータを基に前記補間形状データ収納部7からの補間形状データを各サーボドライバの目標位置及び目標速度に変換する補間形状データ演算処理部9と位置ずれを補正する位置ずれ補正処理部10を設けた。
(もっと読む)
1 - 7 / 7
[ Back to top ]