
Fターム[3D041AD31]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144) | 変速 (1,080) | 変速段、変速比位置 (881)
Fターム[3D041AD31]の下位に属するFターム
Fターム[3D041AD31]に分類される特許
361 - 380 / 841
ハイブリッド車両用駆動装置の制御装置
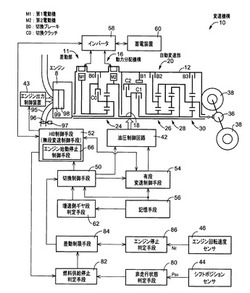
【課題】差動作用の作動可能な差動機構と電動機とを備えるハイブリッド車両用駆動装置において、その差動機構から駆動輪までの動力伝達経路が遮断され、エンジンが停止される場合に、その差動機構を構成する上記動力伝達経路に連結された回転要素が逆回転することを抑制する制御装置を提供する。
【解決手段】自動変速部20内の動力伝達経路が遮断された場合において、燃料供給停止によりエンジン8を停止するという判断であるエンジン停止判断がなされると、切換クラッチC0を係合させるC0ロック制御が実施され、回転要素RE1,RE2,RE3が一体回転する非差動状態もしくは略その状態に差動部11がなることで、エンジン停止時にエンジン8の回転停止に対して第1電動機M1の回転停止が遅れなくなり、その結果、第3回転要素RE3が過渡的に逆回転してしまうことを防止できる。
(もっと読む)
車両用制御装置および原動機出力補正方法

【課題】ヨーモーメント制御装置を備える車両の旋回時に、ドライバーの違和感を低減できる手段を提供すること。
【解決手段】左右の駆動軸間に駆動力差を設定する駆動力配分装置Mdおよび左右の車輪間に制動力差を設定する制動力配分装置Mbの少なくともいずれかと、エンジン出力を制御する出力制御手段Ufとを備える車両において、駆動力配分装置Mdを制御する制御信号TOBJおよび制動力配分装置Mbを制御する制御信号TOBJVの少なくともいずれかを取得し、各制御信号を所定の閾値と比較することで、作動状態を判定する作動判定部(31)と、駆動力配分装置Mdおよび制動力配分装置Mbの少なくともいずれかが作動していると判定した場合に、所定の出力補正信号CSを出力する補正信号生成部(32)とを備えるエンジン出力補正装置Uoを提供する。
(もっと読む)
車両制御装置
【課題】車体モデルと、シャーシモデルと、タイヤモデルとに分離・階層化された車両モデルを用いながら、タイヤの振動状態を精度良く推測する。
【解決手段】
車両モデルにおけるタイヤモデル20は、後輪タイヤモデル21と、前輪タイヤモデル22と、これらの後輪タイヤモデル21と前輪タイヤモデル22とを仮想的に連結する仮想連結要素モデル23とからなる。これにより、タイヤモデル20とシャーシモデル24とを分離しながら、前輪タイヤと後輪タイヤとの間で作用する振動状態の影響を考慮することができるようになり、前輪タイヤ及び後輪タイヤに生じる振動を精度良く推測することが可能になる。
(もっと読む)
歯車式自動変速装置
【課題】目標変速段にシフトを入れるときに、入力軸回転速度を目標同期回転速度と同回転速度する時間を短縮できる歯車式自動変速装置を得る。
【解決手段】歯車式の自動変速機2と、エンジン1と自動変速機2の間に動力を断続するクラッチ3と、各センサから検出信号を入力し、各アクチュエータへ制御信号を出力するコントロールユニット4とを設け、コントロールユニット4は、クラッチアクチュエータ7を制御してクラッチ3を開放し、シフトアクチュエータ8を制御してシフト位置を現在位置から抜き中立状態であるニュートラル位置に移動し、スロットルアクチュエータ16を制御してスロットル15を調整し、回転速度センサ6により検出されたエンジン回転速度が、クラッチ結合判定回転速度の範囲内に入ると、クラッチ3を結合し、エンジン回転速度と入力軸回転速度を同回転速度にしてから目標変速段にシフトを入れる。
(もっと読む)
車両制御装置
【課題】車両の各部に生じる振動を適切に抑制することが可能な車両制御装置を提供すること。
【解決手段】エンジン・駆動系ECU10とブレーキ系ECU20とが、それぞれ、車体モデルと、シャーシモデルと、タイヤモデルとに分離・階層化された同一の車両モデルを記憶する。そして、エンジン・駆動系ECU10が、その車両モデルから推定される車体振動を抑制する制御を行い、ブレーキ系ECU20がシャーシ振動及びタイヤ振動を抑制する制御を行なう。従って、各々の振動を抑制するための適切な制御を実行することが容易になる。
(もっと読む)
車両の制御装置および車両の制御方法
【課題】充電時の振動が抑制された外部充電が可能な車両の制御装置を提供する。
【解決手段】車両の制御装置は、車輪2を駆動するためのモータジェネレータMG2のステータコイルを利用して外部電源から蓄電装置に充電するための充電電圧を発生させる充電システムと、モータジェネレータMG2を駆動するインバータ30と、車両の駐車指示に応じて、インバータ30に対して、モータジェネレータMG2のロータ位置をステータコイルに対して充電時に適する位置に調整する指示を与える制御装置60とを備える。好ましくは、駐車指示は、シフトレバー53をパーキングポジションに設定したことに応じて与えられる。
(もっと読む)
建設機械及びその制御方法
【課題】低速域で良好な走行性能を実現することができる建設機械及びその制御方法を提供する。
【解決手段】蓄電器14に接続された電動発電機11と、エンジン10と、電動発電機及びエンジンの出力軸を結合する遊星ギヤとを備え、電動発電機及び/又はエンジンによって発生したトルクを駆動輪20へ伝達することにより走行可能な建設機械であって、前記遊星ギヤと駆動輪との間に設けられた、変速機12と、エンジンと変速機とを直結する直結クラッチ15と、直結クラッチが解放された状態において、アクセル開度及び前記蓄電器の蓄電量に基づいて、エンジンの回転数を制御し、アクセル開度、電動発電機の動作状態、及び蓄電器の蓄電量に基づいて、変速機の変速段の切替を制御するとともに、アクセル開度、車速、及び変速機の変速段に基づいて、エンジン及び電動発電機に発生させるトルクを決定するように構成されている制御装置2とを備える。
(もっと読む)
ハイブリッド自動車およびその制御方法
【課題】変速処理を模した動作やアクセル操作に対する出力の応答性を高める運転モードの選択を可能とするハイブリッド自動車において、走行に要求される要求駆動力や内燃機関の運転ポイントをより適正に設定する。
【解決手段】ハイブリッド自動車20では、シフトポジションや運転モードに関連した所定条件が成立したときに、走行状態に応じた仮想シフト段が仮目標シフト段SPtmpとして設定され(S471,S472)、仮目標シフト段SPtmpと上下限値Srtとに基づいて値1よりも小さい変化量で緩変化するよう実行用シフト段SP*が設定され(S473)、実行用シフト段SP*の直下および直上の仮想シフト段に対応した仮の要求トルクTra,Trbや仮回転数Nea,Nebに基づいて実行用シフト段SP*に対応した要求トルクTr*と目標回転数Ne*とが設定される(S474〜S476)。
(もっと読む)
無段変速機の変速制御装置およびその変速制御方法
【課題】変速ショックを低減し、かつ、加速応答性を向上させることが可能な無段変速機の変速制御装置および無段変速機の変速制御方法を提供することを目的とする。
【解決手段】エンジン出力トルクを駆動輪に伝達する無段変速機の変速制御装置において、ECU50は、アクセルONを検出した場合に、回転慣性による損失トルクを推定し、推定した回転慣性による損失トルクTlossを補償するエンジン補償トルク制御を開始し、また、エンジン出力トルクTegが推定した回転慣性による損失トルクTlossよりも大きくなった場合に、無段変速機30(油圧制御装置40)に変速開始を指示する。
(もっと読む)
アンダーステア抑制装置
【課題】車両のアンダーステア検出時に、過度の制動力発生を防止して、的確にアンダーステアを抑制するアンダーステア抑制装置を得る。
【解決手段】電動パワステ制御器(アンダーステア検出器)1と、トランスミッション制御器2と、原動機制御器3と、駆動輪ロック傾向検出手段4とを備えている。電動パワステ制御器1によりアンダーステアが検出された際に、トランスミッション制御器2により変速比を低速側に変更する第1の減速制御と、原動機制御器3により原動機出力を低減させる第2の減速制御との少なくとも一方を行う。トランスミッション制御器2は、第1の減速制御の実行中に、駆動輪ロック傾向検出器4の出力に基づいて変速比を制御し、原動機制御器3は、第2の減速制御の実行中に、駆動輪ロック傾向検出器4の出力に基づいて原動機出力を制御する。
(もっと読む)
運転支援方法及び運転支援装置
【課題】処理速度も速く、しかも、精度も落とすことなく安価に各種矢印信号灯を判別し、適切な運転支援を実行することができる運転支援方法及び運転支援装置を提供する。
【解決手段】運転支援装置1の画像プロセッサ8が赤色信号灯及び矢印信号灯の点灯を判定すると、CPU2は、自車位置に基づいて前方の信号機の信号機データSDを読み出す。そして、信号機データSDの矢印信号灯の対象走行レーンデータと自車両が走行している自車両走行レーンに基づいて、CPU2は該矢印信号灯が自車両に対するものかどうかを判定する。種別データの矢印方向を示す方向データに基づいて、点灯した矢印信号灯に即した走行をアナウンスする。
(もっと読む)
車両減速制御装置
【課題】横加速度センサを用いることなく、安価な構成で、車線逸脱を防止することのできる車両減速制御装置を得る
【解決手段】ステアリング回転方向の路面反力トルクを検出する路面反力トルク検出手段2と、路面反力トルク検出手段2により検出された路面反力トルクに基づいて車両のアンダーステア状態を検出するアンダーステア状態検出手段3と、アンダーステア状態検出手段3によりアンダーステア状態が検出された際の路面反力トルクを路面反力トルク検出手段2から読み込み、路面反力トルクに基づいて車両の目標減速力を算出する目標減速力算出手段4と、目標減速力算出手段4で算出された目標減速力に基づいて車両の減速制御を行う車両減速手段5とを備える
(もっと読む)
車両の制御装置
【課題】定速運転時においてアクセル操作に関するドライバの負担を軽減する車両の制御装置を提供する。
【解決手段】車両制御システムは、エンジン11の出力を調整するスロットル制御装置16と、その出力を駆動輪側に伝達する無段変速機26と、システム各部を制御するECU50とを備えている。ECU50は、車両が一定速度で走行している時のアクセル操作量を基準にして同アクセル操作量の近傍領域に加速度F/B制御の不感帯を設ける。そして、ECU50は、アクセル操作量が上記不感帯の領域外にあると判定した場合、都度のアクセル操作量に基づいて目標加速度を算出し、その目標加速度に車両の実加速度を一致させるべく加速度F/B制御を実施する。一方、アクセル操作量が上記不感帯の領域内にあると判定した場合、ECU50は、加速度F/B制御に代えて、実車速をその目標値に一致させるべく車速F/B制御を実施する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 可変動弁機構を備え、かつモータ走行からエンジン走行への移行がスムーズに行われるハイブリッド車両の制御装置を提供する。
【解決手段】 エンジンとモータジェネレータとを接続する第1クラッチと、モータジェネレータと変速機とを接続する第2クラッチと、制御手段とを備え、第1クラッチと第2クラッチを制御することにより、エンジンとモータジェネレータの一方または両方によって走行するハイブリッド車両の制御装置において、エンジンは、バルブタイミングを変更可能な可変動弁機構を備え、可変動弁機構は、油圧によってバルブタイミングを変更可能な構成であって、制御手段は、エンジンの駆動力を用いた走行中にエンジンを停止する際、エンジンへの燃料供給を停止した後に第1クラッチを解放することとした。
(もっと読む)
車両用駆動装置の制御装置
【課題】差動状態と非差動状態とを切換可能な電気的差動部と、複数の係合装置を有する変速部と、差動状態と非差動状態とを切り換える差動状態切換手段と、変速部の変速制御を行う変速制御手段と、変速に関与する制御要素の変速時における制御量を学習補正する学習制御手段とからなる車両用駆動装置において、電気的差動部の状態に応じた学習を実行し、適正な変速制御を実行することにより変速ショックの防止もしくは低減を行う。
【解決手段】学習制御手段は、自動変速部の変速が行われる際の電気的差動部の状態に対応させて学習補正を実施し、電気的差動部の所定の状態に対応する学習補正の内容に基づいて前記所定の状態とは異なる状態に対応する制御量を演算する制御量演算手段を備え、変速制御手段は、変速が行われる際の前記所定の状態とは異なる状態に対応した学習補正の内容に基づいて変速制御を行う。
(もっと読む)
車両の駆動制御装置
【課題】変速時に排気温度が過大に上昇することを抑制しつつ、応答性のよい変速を行う。
【解決手段】
無段変速機の手動変速時に、第2速から第4速にしたとき、点火時期遅角制御(トルクダウン制御)を行いつつ、該点火時期遅角制御の排気温度への影響を考慮して設定された継続可能時間t内に変速終了するか否かを判定し、終了しないと判定されたときは、点火時期遅角量を、車両加速度を許容加速度G0に制限するように設定した点火時期リミッタTlimでリミッタ処理しながら遅角量を徐々に進角側に戻すようにした。
(もっと読む)
走行支援装置
【課題】検出手段によって検出された全種類の加減速要因に対して最適な制御を行う走行支援装置を提供する。
【解決手段】走行支援ECU12−Cは、加減速要因候補を検知する毎に、加減速要因の時空間上での位置を予測し、自車の時空間上での予測位置との干渉の程度を評価し、干渉が有る場合又は干渉度が大きい場合に、干渉予測位置を登録し、目標地点へ到達する時の地点目標挙動を干渉予測位置での要因予測挙動に余裕を見込んで略一致する値とし、地点目標挙動、運転方針に基づいて非定常制御開始点を求めて登録する。そして、自車が何れかの登録要因についての非定常制御開始点を経過したときには、移動体速度とその登録要因についての地点目標挙動を基に加減速制御の目標値を逐一求める。
(もっと読む)
駆動力制御装置
【課題】運転指向に基づいて車両の駆動力を制御する駆動力制御装置において、車両の走行に要する注意度と乖離した駆動力制御が行われることを抑制することが可能な駆動力制御装置を提供する。
【解決手段】人工知能システムを用いて運転指向を推定し、前記推定された運転指向に基づいて車両の駆動力を補正する駆動力制御装置であって、前記車両の走行に要する注意度を推定する手段(S002)と、前記車両の走行に要する注意度に基づいて、前記駆動力の補正の応答性を変更する手段(S007〜S010)とを備えたことを特徴としている。
(もっと読む)
アンダーステア抑制装置
【課題】車両のアンダーステアを検出し、シフトダウンおよび原動機出力低減を行い車両を減速させる際に、過度の制動力による横力の減少を防止し、的確にアンダーステアを抑制するアンダーステア抑制装置を得る。
【解決手段】アンダーステアを検出する電動パワステ制御器1と、原動機からの原動機出力を制御する原動機制御器4と、原動機出力の車輪への伝達および変速比を制御するトランスミッション制御器3とを備え、電動パワステ制御器1により車両のアンダーステアが検出された際に、トランスミッション制御器3による変速比を低速側に変更するとともに、原動機制御手段による原動機出力を低減させる。原動機制御器4およびトランスミッション制御器3は、トランスミッション制御器3による変速比の変更時に、変速比の変更前後での車輪の駆動力偏差または車輪の車輪速偏差が小さくなるように、原動機出力または原動機出力の伝達を制御する。
(もっと読む)
車両用動力伝達装置
【課題】電気モータ等を追加する必要がなく、スムーズ且つ迅速な変速制御ができる動力伝達装置を得る。
【解決手段】車両用動力伝達装置は、エンジンと、クラッチと、エンジンの出力回転を変速して出力する変速機と、スロットルアクチュエータと、エンジンの出力調整およびクラッチによる伝達制御を組み合わせて変速制御行う変速アクチュエータとを備えて構成される。変速アクチュエータは、現在の変速段を目標変速段へ変速する要求が出た時に、エンジン出力トルクを減少させ、出力トルクが所定値を下回ったときに、中立段に切り換え、その後目標変速段に対応する目標エンジン回転数に変更するようにスロットル調整を行わせ、エンジン回転数がほぼ目標エンジン回転数に到達したときに、クラッチを解放するとともに目標変速段に切り換え、目標変速段に切り換わったときに自動クラッチを接続する制御を行う。
(もっと読む)
361 - 380 / 841
[ Back to top ]