
Fターム[3D041AE35]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 駆動装置 (6,172) | 変速 (1,291) | 最適ギヤ段、最適変速比 (935) | シフトタイミング (46)
Fターム[3D041AE35]に分類される特許
1 - 20 / 46
車両の駆動力制御装置
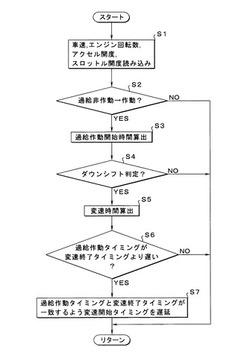
【課題】加速性を向上させるとともにドライバビリティを向上することのできる過給機付き内燃機関と変速機とを有する駆動力制御装置を提供する。
【解決手段】前記過給作動開始時間算出手段(ステップS3)で算出される過給作動開始タイミングが、前記変速終了時間算出手段(ステップS5)で算出される変速終了タイミングより時間的に遅れる場合、前記過給作動開始タイミングと前記変速終了タイミングとが時間的にほぼ一致するように変速終了タイミングを遅延するように変速機7の変速制御を行う手段(ステップS7)を備えている。
(もっと読む)
車両の駆動力制御装置

【課題】低負荷時に求められる車速変動に対し駆動力段差の無いスムーズさと高負荷時に求められる変速に伴って駆動力が変化するリズム感を併せて実現することができる車両の駆動力制御装置を提供すること。
【解決手段】トルク制御可能なエンジンEng、モータ/ジェネレータMGと、変速比を有限な段数で制御可能な自動変速機ATの組み合わせにより左右後輪RL,RRに伝達する駆動力を制御する。このFRハイブリッド車両の駆動力制御装置において、要求駆動力を示す負荷を検出するアクセル開度センサ16を設ける。そして、駆動力制御手段(図6)は、アクセル開度と車速に応じてタイヤの駆動力の目標値を割り付ける「駆動力デマンド制御」と、アクセル開度と動力源の回転速度に応じて動力源の出力軸トルクの目標値を割り付ける「トルクデマンド制御」を、検出された負荷に応じて切り替える。
(もっと読む)
変速制御システムおよび車両
【課題】ドライバビリティを向上させることができる変速制御システムおよびそれを備えた車両を提供する。
【解決手段】変速制御システムは、シフトアップ操作装置、クラッチアクチュエータ、シフトアクチュエータおよびCPUを備える。CPUは、シフトアップ操作装置の操作レバーの移動が開始される時点t1において、クラッチアクチュエータを制御することによりクラッチの切断動作を開始する。また、操作レバーの移動が終了される時点t2において、クラッチアクチュエータを制御することによりクラッチの切断動作を完了する。その後、CPUは、シフトアクチュエータを制御することにより変速機のギアポジションをシフトさせる。
(もっと読む)
省燃費運転システム及びその制御方法
【課題】上り坂を走行中に上り坂に関する道路勾配情報データベースを構築することが出来て、上り坂を走行する際に省燃費走行を行なう様なアドバイスや車両制御を行なうことが出来る省燃費運転システム及びその制御方法の提供。
【解決手段】車速を計測する装置(3)と、車両の加速度を計測する装置(4)と、燃料流量を計測する装置(5)と、エンジン負荷を計測する装置(6)と、エンジン回転数を計測する装置(7)と、シフト位置を検出する装置(9)と、上述した各装置からの信号を受信して演算と解析を行なう制御装置(10)とを備え、該制御装置(10)はエンジン出力を演算し、演算されたエンジン出力がエンジン出力規定値(Pa)以上であるが、車両加速度が車両加速度規定値(αa)以下であれば上り坂を走行していると判断する機能を有している。
(もっと読む)
自動車のドライブトレインを作動させる方法
本発明は、エンジン、複数グループトランスミッション、およびエンジンと複数グループトランスミッションの間に接続されたクラッチを有する車両のドライブトレインを作動させる方法であって、その際複数グループトランスミッションが、かみ合い接続式のメイントランスミッション並びにシンクロ式の前段接続グループ及び/又はシンクロ式の後段接続グループを有するものに関する。本発明に従い、閉じたクラッチの操作をすることなく、現状ギアから目標ギアへのシフトが、かみ合い接続式のメイントランスミッションを操作することなく、もっぱらシンクロ式の前段接続グループまたはシンクロ式の後段接続グループの操作によって、以下のように実施される。a)まずエンジンモーメントが引き下げられ、エンジンモーメントの境界値が到達されるかまたは下回られた際に、シンクロ式の前段接続グループまたはシンクロ式の後段接続グループが、接続を解除しようとする現状ギアの解除または切断方向へ操作され、b)その後これに引き続き、エンジンモーメントがおよそゼロとなったとき、シンクロ式の前段接続グループまたはシンクロ式の後段接続グループが解除され、そしてニュートラル位置にもたらされるか、または保持され、
c)引き続いて、エンジンが、接続すべき目標ギアに依存する目標回転数にもたらされ、
d)その後これに引き続いて、エンジンが、定められた公差を有する目標回転数に達したとき、シンクロ式の前段接続グループまたはシンクロ式の後段接続グループが、接続すべき目標ギアを接続するまたは入れる方向に操作され、e)シンクロ式の前段接続グループまたはシンクロ式の後段接続グループが接続されるのに引き続いて、エンジンモーメントが再び上昇される。
(もっと読む)
無段変速機の変速制御装置およびその変速制御方法
【課題】変速ショックを低減し、かつ、加速応答性を向上させることが可能な無段変速機の変速制御装置および無段変速機の変速制御方法を提供することを目的とする。
【解決手段】エンジン出力トルクを駆動輪に伝達する無段変速機の変速制御装置において、ECU50は、アクセルONを検出した場合に、回転慣性による損失トルクを推定し、推定した回転慣性による損失トルクTlossを補償するエンジン補償トルク制御を開始し、また、エンジン出力トルクTegが推定した回転慣性による損失トルクTlossよりも大きくなった場合に、無段変速機30(油圧制御装置40)に変速開始を指示する。
(もっと読む)
車両用駆動装置の制御装置
【課題】差動状態と非差動状態とを切換可能な電気的差動部と、複数の係合装置を有する変速部と、差動状態と非差動状態とを切り換える差動状態切換手段と、変速部の変速制御を行う変速制御手段と、変速に関与する制御要素の変速時における制御量を学習補正する学習制御手段とからなる車両用駆動装置において、電気的差動部の状態に応じた学習を実行し、適正な変速制御を実行することにより変速ショックの防止もしくは低減を行う。
【解決手段】学習制御手段は、自動変速部の変速が行われる際の電気的差動部の状態に対応させて学習補正を実施し、電気的差動部の所定の状態に対応する学習補正の内容に基づいて前記所定の状態とは異なる状態に対応する制御量を演算する制御量演算手段を備え、変速制御手段は、変速が行われる際の前記所定の状態とは異なる状態に対応した学習補正の内容に基づいて変速制御を行う。
(もっと読む)
ハイブリッド車両
【課題】ハイブリッド車両において、運転者による操作と車両の走行環境に基づいて運転モードの切り替えを行うことで運転者の加速意図に応じた加速性能を実現する。
【解決手段】運転者による運転操作と走行路の走行環境に基づいて、車両の走行状態を判断し、スポーツ走行状態である場合にはエンジン始動線を通常走行状態に係る原位置からEV走行モード領域側に変更してHEV走行モード領域を拡大する。
(もっと読む)
内燃機関の制御装置
【課題】増圧機構を備えたコモンレール式エンジンにおいて、増圧機構作動に伴うエンジントルクの落ち込みによる運転者の違和感を抑制することのできる内燃機関の制御装置を提供すること。
【解決手段】増圧機構の作動及び停止の切り換えと変速機の変速切り換えとを連動させる。
(もっと読む)
車両用駆動装置の制御装置
【課題】変速部の変速とエンジンの始動とが重なるときに、エンジン始動に伴うショックの抑制とエンジントルク発生までの応答性向上とを両立することができる車両用駆動装置の制御装置を提供する。
【解決手段】自動変速部20の変速とエンジン8の始動とが重なる場合には、変速時エンジン始動制御手段として機能するエンジン始動停止制御手段86により、自動変速部20の変速中にエンジン回転駆動制御を行うと共に自動変速部20の変速終了後にエンジントルク発生制御を行うことによってエンジンが始動させられるので、自動変速部20の変速中にエンジン回転速度NEが所定回転速度NE’以上に引き上げられるもののエンジントルクTEの発生は変速後となることから、エンジン始動に伴うショックの抑制とエンジントルク発生までの応答性向上とを両立することができる。
(もっと読む)
車両の制御装置
【課題】ブレーキホールド制御実施中にニュートラル制御を実施している状況から、発進要求に応じてニュートラル制御からの復帰を行うときに、そのニュートラル制御の復帰時のショックを抑制する。
【解決手段】ニュートラル制御からの復帰時に、運転者のアクセルペダル踏み込み量に関係なく、スロットルバルブを、ニュートラル制御からの復帰開始時から所定時間遅延した後に緩やかに開いて、エンジントルクの早期上昇を抑制する(ステップST4)。また、ブレーキ圧についても、ニュートラル制御からの復帰開始時から所定時間遅延した後に緩やかに解放する(ステップST5〜ST8)。このようにして、ニュートラル制御からの復帰時の環境(スロットル開度、ブレーキ力)を、前進クラッチの係合を考慮して適正に設定することで、ニュートラル制御からの復帰時のショックを抑制することができる。
(もっと読む)
自動変速機の変速制御装置
【課題】アクセル開度を所定値よりも大きくして走行中に自動変速機をアップシフト側に変速する変速動作において、エンジン回転数が回転数領域を超えるオーバーレブが生じて、エンジン出力が低下してしまうという問題を解消する。
【解決手段】通常は、実効ギア比Grが変化するイナーシャ相の際(図3の瞬時t16〜瞬時17)に、エンジントルクを所定のトルクダウン値Ttdまで低下させるトルクダウン制御を行う。イナーシャ相開始の際(図3の瞬時t14〜瞬時16)のエンジン回転数Neが図3の破線のように目標回転数領域*Wを超えると予測される場合には、上記のトルクダウン制御に加え、変速動作開始後かつ前記イナーシャ相の開始を検知する前に(図3の瞬時t14〜瞬時t16)エンジントルクTeをトルクダウン値Ttdよりも大きく変速動作開始時のエンジントルクTe1よりも小さくするトルクダウン制御を行う。
(もっと読む)
車両の制御装置、制御方法、その制御方法をコンピュータに実行させるためのプログラムおよびプログラムを記録した記録媒体
【課題】摩擦係合要素が滑らない状態であっても、アップシフトにより解放される摩擦係合要素に供給する油圧を補正する。
【解決手段】ECUは、パワーオンアップシフトのイナーシャ相が開始した時点での解放側油圧が予め定められた目標圧より高いと(S140にてYES)、解放側油圧が低くなるように補正するステップ(S142)と、パワーオンアップシフトのイナーシャ相が開始した時点での解放側油圧が目標圧より低いと(S150にてYES)、解放側油圧が高くなるように補正するステップ(S152)とを含む、プログラムを実行する。
(もっと読む)
車両の制御装置、制御方法、その制御方法をコンピュータに実行させるためのプログラムおよびプログラムを記録した記録媒体
【課題】摩擦係合要素に供給する油圧をオートマチックトランスミッションの入力トルクに精度よく対応させる。
【解決手段】ECUは、イナーシャ相の開始後において、予め定められた操作量以上のアクセル操作がなされると、オートマチックトランスミッションの入力トルクを推定するステップ(S120)と、推定された入力トルクを再ホールドするステップ(S144)と、再ホールドされた入力トルクに基づいて、イナーシャ相開始時点の係合圧の指示値を設定するとともに、係合圧をイナーシャ相中において漸増させる際の勾配を設定するステップ(S150)と、設定された勾配で係合圧を漸増するステップ(S156)とを含む、プログラムを実行する。
(もっと読む)
自動変速機の変速制御装置
【課題】クラッチツウクラッチ変速が行われる自動変速機において、解放側摩擦係合装置および係合側摩擦係合装置のトルク容量を制御するためのトルク指令値の適合作業を一層軽減することができる変速制御装置を提供する。
【解決手段】トルク容量算出手段114により、目標出力トルクTOUT*およびトルク分担率に基づいてイナーシャ相中のアプライ側クラッチトルクが算出されると共に、トルク相中におけるドレン側クラッチトルクが目標出力トルクTOUT*およびトルク相中におけるアプライ側クラッチトルクに基づいて算出され、変速制御手段104によりドレン側およびアプライ側のクラッチトルクがそれぞれトルク指令値に変換されて解放側摩擦係合装置および係合側摩擦係合装置の作動が制御されるので、自動変速機10の出力トルクTOUTの目標変化パターンを決定できるように適合作業を行えば良く、トルク指令値の適合作業を一層軽減することができる。
(もっと読む)
自動変速機の変速制御装置
【課題】動力源のトルク制御の応答性に拘らずパワーONダウンシフト時のアウトプットトルクの落込みを防止しつつ所定の変速時間内に変速が完了するように、ダウンシフト制御が安定して行われるようにする。
【解決手段】パワーONダウンシフトの変速出力(時間t1 )をトリガとして所定時間TQDELAY後にエンジンのトルクアップ量tareqを表す信号が出力され、トルクアップ制御が開始されるため、エンジンの応答遅れに拘らず解放側摩擦係合装置に滑りが生じる時点で確実にエンジンのトルクアップを行うことができる。また、タービン回転速度NTの変化速度ΔNTが目標値DNTKEEPに達すると(時間t3 )、解放側摩擦係合装置の油圧指令値pslx=pslxとされ、その時の油圧指令値に固定されるため、アウトプットトルクの落込みを防止しつつ所定の変速時間内に変速が完了するように、パワーONダウンシフトが確実に進行させられる。
(もっと読む)
自動変速制御装置および車両
【課題】乗車フィーリングを向上させることが可能な自動変速制御装置を提供する。
【解決手段】車両の走行中にシフトチェンジ操作があると、最初にシフトアクチュエータを駆動してギアチェンジを開始させる。また、ギアチェンジの開始と同時にエンジン駆動力を低減させる処理(点火遅角処理、噴射量減量処理、または空気量減量処理)を行う。ギアチェンジの開始後、所定時間が経過した後に、クラッチアクチュエータを駆動してクラッチの切断を開始する。
(もっと読む)
車両の制御装置
【課題】有段式自動変速機を搭載した車両において、変速時に要求する動力源から出力される目標トルクを的確に算出して、トルクの変動による変速ショックを抑制する。
【解決手段】ECT_ECUは、変速中でない定常時であるか変速中であるかを判断するステップ(S100)と、定常時であると現在ギヤ段を仮想ギヤ段に設定するステップ(S200)と、変速中であってイナーシャ相開始前であると(S300にてYES)変速前ギヤ段を仮想ギヤ段に設定するステップ(S400)と、変速中であってイナーシャ相開始後であると(S300にてNO)変速後ギヤ段を仮想ギヤ段に設定するステップ(S500)と、変速進行度αを算出するステップ(S900)と、仮想ギヤ段と変速進行度αとに基づいて仮想ギヤ比を算出するステップ(S1000)と、仮想ギヤ比を用いて目標エンジントルクを算出するステップ(S1100)とを含む、プログラムを実行する。
(もっと読む)
車両用制御装置
【課題】 ECUによる車速制限動作を解除した場合においても、自動変速機を安定的に制御可能にすること。
【解決手段】 エンジン総合制御装置70内にエンジン制御装置10と自動変速機制御装置20を有し、共通の車速信号線を用いてエンジン制御と自動変速機制御を行ない、車両の車速を制限速度以下に制限する車速制限機能を備えてなる車両用制御装置100において、エンジン総合制御装置70(エンジン制御装置10と自動変速機制御装置20)と自動変速機30の間に制御補助装置60を介装し、制御補助装置60は、車両の実車速が制限速度未満の監視速度を越えるに至ったとき、エンジン制御装置10の車速制限機能による車速制限動作を解除するとともに、実車速に基づいて自動変速機30を制御するもの。
(もっと読む)
作業車両の制御装置
【課題】サイクルタイム短縮のため、車両が前進状態で後進操作がなされる場合があり、このような場合、後進クラッチに大きな熱負荷がかかる。また変速ショックが大きい。これをブレーキ制御にて対応する。
【解決手段】車体の現在の走行方向が前進走行方向Fであるか後進走行方向Rであるかを判別し、走行操作レバーの選択操作位置が切り換えられた際に、走行操作レバーで選択されている走行方向位置(例えばR)と、上記の判別されている走行方向(たとえばF)とが逆の走行方向になっており、かつ、検出車体速度が所定のしきい値以上になっていることを条件に、ブレーキ装置を作動させる。また、走行操作レバーの選択操作位置が切り換えられた際に、検出車体速度が所定のしきい値以下になっていることを条件に、ブレーキ装置の作動を解除する。
(もっと読む)
1 - 20 / 46
[ Back to top ]